| | 本章では、ここまでの内容で紹介しきれなかった、より細かな Armadillo の設定方法や、開発に役立つヒントなどを紹介します。 各トピックを羅列していますので、目次の節タイトルからやりたいことを探して辞書的にご使用ください。 Armadillo BaseOS ではルートファイルシステムに overlayfs を採用しています。 そのため、ファイルを変更した後 Armadillo の電源を切ると変更内容は保持されません。
開発中などに rootfs の変更内容を保持するには、変更したファイルに対して persist_file コマンドを使用します。 開発以外の時は安全のため、ソフトウェアアップデートによる更新を実行してください。
SWUpdate に関しては 「アップデート機能について」 を参照してください。 rootfs の内容を変更しても、ソフトウェアアップデートを実施した際に変更した内容が保持されない可能性があります。
ソフトウェアアップデート実施後も変更内容を保持する手順に関しては 「swupdate_preserve_files について」 を参照してください。 persist_file コマンドの概要を 図6.1「persist_file のヘルプ」 に示します。
ファイルの保存・削除手順例

|
追加・変更したファイルを rootfs へコピーします。
| 
|
-r を指定すると、ひとつ前の rm -f コマンドで削除したファイルがrootfsからも削除されますのでご注意ください。
| 
|
すでに rootfs に存在するファイルも一度削除してからコピーするため、このようなメッセージが表示されます。
|
ソフトウェアアップデート後も変更を維持する手順例
|
何らかのファイルの内容を変更します。
| |
-P オプションを付与して persist_file を実行します。
| |
swupdate_preserve_files に追加されたことを確認します。
|
変更ファイルの一覧表示例
|
rootfs のファイルを見せないディレクトリは opaque directory と表示されます。
| |
削除したファイルは whiteout と表示されます。
|
パッケージをインストールする時はapkコマンドを使用してメモリ上にインストールできますが、
persist_file コマンドで rootfs に直接インストールすることも可能です。
|
この例では Armadillo を再起動せずにインストールしたコマンドを使用できましたが、Armadillo の再起動が必要となるパッケージもありますので、その場合は Armadillo を再起動してください。
|
Armadillo Base OS において、ユーザーアプリケーションは基本的にコンテナ内で実行されます。
3章開発編で紹介した開発手順では、基本的に SWUpdate を使用してコンテナを生成・実行していました。 以下では、より自由度の高いコンテナの操作のためにコマンドラインからの操作方法について紹介します。 6.2.1. Podman - コンテナ仮想化ソフトウェアとはコンテナとはホスト OS 上に展開される仮想的なユーザ空間のことです。
コンテナを使用することで複数の Armadillo-IoT ゲートウェイ G4 でも同一の環境がすぐに再現できます。
ゲスト OS を必要としない仮想化であるため、アプリケーションの起動が素早いという特徴があります。 Podman とはこのようなコンテナを管理するためのソフトウェアであり、使用方法は
コンテナ管理ソフトウェアの 1 つである Docker と互換性があります。 この章では、コンテナ仮想化ソフトウェアの 1 つである Podman の基本的な使い方について説明します。
Armadillo-IoT ゲートウェイ G4 で実行させたいアプリケーションとその実行環境自体を 1 つの Podman イメージとして扱うことで、
複数の Armadillo-IoT ゲートウェイ G4 がある場合でも、全てのボード上で同一の環境を再現させることが可能となります。 この章全体を通して、イメージの公開・共有サービスである Docker Hub から取得した、Alpine Linux のイメージを
使って説明します。 イメージからコンテナを作成するためには、podman_start コマンドを実行します。
podman や docker にすでに詳しいかたは podman run コマンドでも実行できますが、ここでは 「コンテナ起動設定ファイルを作成する」 で紹介するコンテナの自動起動の準備も重ねて podman_start を使います。
イメージは Docker Hub から自動的に取得されます。
ここでは、簡単な例として "ls /" コマンドを実行するコンテナを作成します。 |
コンテナのコンフィグを作成します。このファイルでは、コンテナのイメージやコマンド、デバイスへのアクセス権限を設定します。詳しい設定の説明には 「コンテナ起動設定ファイルを作成する」 を参照ください。
| |
コンテナのイメージを取得します。イメージが Armadillo に置いてない場合は「Error: docker.io/alpine: image not known」の様なエラーで失敗します。
| |
コンテナを起動します。これは Armadillo 起動時に自動的に起動されるコンテナと同じものになります。自動起動が不要な場合には set_autostart no で無効化できます。
| 
|
podman logs コマンドで出力を確認します。
|
"ls /" を実行するだけの "my_container" という名前のコンテナが作成されました。
コンテナが作成されると同時に "ls /" が実行され、その結果がログに残ります。
ここで表示されているのは、コンテナ内部の "/" ディレクトリのフォルダの一覧です。 ![[ティップ]](images/tip.png) | |
|---|
podman_start でコンテナが正しく起動できない場合は podman_start -v <my_container> で podman run のコマンドを確認し、 podman logs <my_container> で出力を確認してください。
|
コンテナを作成するためのイメージは、イメージ一覧を表示する podman images コマンドで確認できます。 podman images コマンドの詳細は --help オプションで確認できます。 作成済みコンテナ一覧を表示するためには podman ps コマンドを実行します。 一覧表示により、コンテナ名やコンテナ ID を確認することができます。-a オプションを付けない場合は、動作中のコンテナのみ表示されます。
podman ps コマンドの詳細は --help オプションで確認できます。 作成済みのコンテナを起動するためには podman start コマンドを実行します。 -a オプションを与えると、コンテナ内で実行されたアプリケーションの出力を確認できます。 ここで起動している my_container は、起動時に "ls /" を実行するようになっているので、その結果が出力されます。
podman start コマンドの詳細は --help オプションで確認できます。 動作中のコンテナを停止するためには podman stop コマンドを実行します。 podman stop コマンドの詳細は --help オプションで確認できます。 コンテナに対して変更が行われた状態で、そのままコンテナを停止してしまうと変更が失なわれてしまいます。 変更を保存するには二つの方法があります。
podman commit コマンドで保存する。
podman commitで保存する度に、変更が行なわれた差分が保存されます。
繰り返し差分を保存すると、イメージサイズが大きくなってしまいます。
ストレージ容量が不足する場合は、ベースとなるOSのイメージから作り直してください。
「電源を切っても保持されるディレクトリ(ユーザーデータディレクトリ)」を使用する。
podman_start の add_volumes コマンドでコンテナに Armadillo Base OS のディレクトリをコンテナで使うことができます。
保存するデータの性質によって、保存先を選択してください。 -
/var/app/volumes/myvolume: アップデートした場合はコピーされません。
ログやデータベースなど、アプリケーションが作成し続けるようなデータの保存に向いています。
-
myvolume か /var/app/rollback/volumes/myvolume: アップデートの際にコピーしてアップデートを行うので、アップデート中でも安全に使いつづけます。
アプリケーションと一緒にアップデートするようなデータの保存に向いています。
6.2.2.7. コンテナの自動作成やアップデートpodman run, podman commitでコンテナを作成できますが、定期的にアップデートをする際には
コンテナの作成やアップデートを自動化できると便利です。 これを実現するために、Dockerfileとpodman buildを使います。この手順はArmadilloで実行可能です。
イメージを docker.io のイメージから作りなおします
イメージを前のバージョンからアップデートします
この場合、 podman_partial_image コマンドを使って、差分だけをインストールすることもできます。 [armadillo ~/podman-build-update]# podman_partial_image -b my_image:1 \
-o my_image_2_partial.tar my_image:2
[armadillo ~/podman-build-update]# ls -lh
-rw-r--r-- 1 root root 88 Dec 21 15:24 Dockerfile
-rw-r--r-- 1 root root 9.4M Dec 21 15:26 my_image_1.tar
-rw-r--r-- 1 root root 9.4M Dec 21 15:26 my_image_2.tar
-rw-r--r-- 1 root root 51K Dec 21 15:26 my_image_2_partial.tar
作成した .tar アーカイブは 「mkswu の .desc ファイルを編集する」 の swdesc_embed_container と swdesc_usb_container で使えます。 作成済みコンテナを削除する場合は podman rm コマンドを実行します。 podman ps コマンドの出力結果より、コンテナが削除されていることが確認できます。
podman rm コマンドの詳細は --help オプションで確認できます。 [armadillo ~]# podman rm --help podmanのイメージを削除するには podman rmi コマンドを実行します。
イメージを削除するためには、そのイメージから作成したコンテナを先に削除しておく必要があります。
podman rmi コマンドにはイメージ ID を指定する必要があるため、podman images コマンドで確認します。 podman images コマンドの出力結果より、コンテナが削除されていることが確認できます。
podman rmi コマンドの詳細は --help オプションで確認できます。 | |
|---|
SWU で転送されたイメージは podman images で Read-Only として表示されますので、
podman rmi を実行するとエラーとなります。
その場合は abos-ctrl podman-rw rmi をご使用ください。 abos-ctrl podman-rw については 「イメージを eMMC に保存する」 を参照してください。
|
実行中のコンテナに接続し、コンテナ内で指定したコマンドを実行するには podman exec コマンドを実行します。
podman exec コマンドでコンテナ内部のシェルを起動すると、コンテナ内部を操作できるようになります。ここでは、sleep infinity コマンドを
実行して待ち続けるだけのコンテナを作成し、そのコンテナに対して podman exec コマンドでシェルを起動する例を示します。 podman_start コマンドでコンテナを作成し、その後作成したコンテナ内で sh を実行しています。
sh を実行すると、コンテナ内のプロンプトが表示されコンテナ内部を操作できるようになります。
上記ではコンテナ内で、ps コマンドを実行しています。コンテナ作成時に実行した sleep と podman exec で実行した
sh がプロセスとして存在していることが確認できます。
コンテナ内のシェルから抜ける時は exit コマンドを実行します。 podman exec コマンドから抜けても、コンテナがまだ実行中です。コンテナを停止したい場合は podman stop sleep_container か podman kill sleep_container で停止して podman rm sleep_container でそのコンテナを削除してください。
podman exec コマンドの詳細は --help オプションで確認できます。 複数のコンテナを実行している環境で、それらのコンテナ間で通信を行う方法を示します。
これにより、例えば SQL サーバを実行しているコンテナに対し別のコンテナから接続するといった
使い方ができます。 コンテナには作成した時点でローカル IP アドレスが割り当てられるので、コンテナの名前かその IP アドレスで通信を行うことができます。 準備として、2 つのコンテナを作成します。 コンテナに割り当てられた IP アドレスを確認するには podman inspect コマンドを実行します。 これらの IP アドレスを使って、一方のコンテナからもう一方のコンテナへ対し ping コマンドで疎通確認を行うことができます。 このように、my_container_1(10.88.0.108) から my_container_2(10.88.0.109) への通信が確認できます。 6.2.2.12. podでコンテナのネットワークネームスペースを共有するpodman_start で pod 機能を使うことができます。
pod を使うことで、複数のコンテナが同じネットワークネームスペースを共有することができます。
同じ pod の中のコンテナが IP の場合 localhost で、 unix socket の場合 abstract path で相互に接続することができます。
コンテナと同じく、 /etc/atmark/containers/[NAME].conf ファイルを作って、 set_type pod を設定することで pod を作成します。 pod を使う時にコンテナの設定ファイルに set_pod [NAME] の設定を追加します。 ネットワークネームスペースは pod を作成するときに必要なため、 ports, network と ip の設定は pod
のコンフィグファイルに入れなければなりません。 必要であれば、他の podman pod create のオプションを add_args で設定することができます。 .conf ファイルで使用できる各種パラメータについては、「コンテナ起動設定ファイルを作成する」を参照してください。
podman_start で podman の network も作成できます。
デフォルトの 10.88.0.0/16 が使えない場合、あるいはコンテナ同士で接続できないようにしたい場合は使ってください。 コンテナと同じく、 /etc/atmark/containers/[NAME].conf ファイルを作って、 set_type network を設定することで network を作成します。 そのネットワークを使う時にコンテナの設定ファイルに set_network [NAME] の設定をいれます。 ネットワークのサブネットは set_subnet [SUBNET] で設定します。
この設定は set_type network の後しか使えませんので、set_type はファイルの最初のところに使ってください 他の podman network create のオプションが必要であれば、 add_args で設定することができます。 .conf ファイルで使用できる各種パラメータについては、「コンテナ起動設定ファイルを作成する」を参照してください。
podman では REST API による管理アクセスも可能です。 自分のコンテナから他のコンテナの管理が必要な場合に、ホストの podman サービスを有効にして、
コンテナに /run/podman をボリュームマウントすれば podman --remote で管理できます。 | |
|---|
コンテナの設定によって podman の socket へのパスが自動設定されない場合もあります。
podman --remote でエラーが発生した場合に CONTAINER_HOST=unix:/path/to/podman.sock で
socket へのパスを設定してください。 |
Armadillo のホスト側の udev rules からコンテナを起動する場合は podman_start 等を直接実行すると
udev の子プロセス管理によってコンテナが停止されますので、その場合はサービスを有効にし、
podman_start --create <container> コマンドまたは set_autostart create の設定でコンテナを生成した上
podman --remote start <container> で起動してください。 6.2.2.15. リモートリポジトリにコンテナを送信する
イメージをリモートリポジトリに送信する:
[armadillo ~]$ podman image push <localimage> docker://<registry>/<remoteimage>:<tag>
set_pull always を設定しないかぎり、SWUpdateでダウンロードの命令を送らないとアップデートを行いません。
(mkswuについては「Armadillo のソフトウェアをアップデートする」を参考にしてください) [ATDE ~/mkswu]$ cp /usr/share/mkswu/examples/pull_container_nginx.desc .
[ATDE ~/mkswu]$ cp -r /usr/share/mkswu/examples/nginx_start .
[ATDE ~/mkswu]$ cat pull_container_nginx.desc
swdesc_option version=1
swdesc_pull_container "docker.io/nginx:alpine"
swdesc_files --extra-os nginx_start
[ATDE ~/mkswu]$ mkswu pull_container_nginx.desc
Enter pass phrase for /home/atmark/mkswu/swupdate.key:
pull_container_nginx.swu を作成しました。
6.2.2.16. イメージを eMMC に保存するArmadillo Base OS のデフォルトでは、Podman のデータは tmpfs に保存されます。 起動時にコンテナを起動するにはイメージを eMMC に書き込む必要があります。
開発が終わって運用の場合は 「イメージを SWUpdate で転送する」 でコンテナのイメージを転送します。この場合は読み取り専用の app パーティションのサブボリュームに展開します。 開発の時に以下の abos-ctrl podman-rw か abos-ctrl podman-storage --disk のコマンドを使って直接にイメージを編集することができます。 | |
|---|
ここで紹介する内容はコンテナのイメージの管理の説明です。データベース等のコンテナから書き込みが必要な場合には 「コンテナの変更を保存する」 にあるボリュームの説明を参照してください。 |
abos-ctrl podman-rw を使えば、read-only になっているイメージを扱う事ができます。
abos-ctrl podman-storage はメモリとディスクの切り替えの他に、読み書きストレージから読み取り専用ストレージへのコピーもできます。
|
イメージを書き込み可能ストレージに取得します。
| |
abos-ctrl podman-storage をオプション無しで実行します。
| |
書き込み可能ストレージにイメージがある場合に対応を聞かれます。今回はコピー(copy)します。
| |
abos-ctrl podman-storage にオプションを指定しなかったので、ストレージが tmpfs のままになります。すでに --disk で切り替えた場合にディスクのままでも可能です。
| 
|
コピーされたイメージを確認します。イメージが読み取り専用(R/O, Read only)になりました。
|
| |
|---|
podman が壊れやすいので、デフォルトの「abos-ctrl podman-storage --tmpfs」で運用することを推奨しますが、tmpfs の容量が小さくてイメージの操作には向いてません。 開発時には「abos-ctrl podman-storage --disk」の状態で作業を行い、運用時には「abos-ctrl podman-storage --tmpfs」に戻してください。
戻る際に「copy」を選択する場合は一時的なストレージをそのまま使いつづけますので、すべての変更が残ります。 |
![[警告]](images/warning.png) | |
|---|
SWUpdate でアップデートをインストールする際には、/var/lib/containers/storage_readonly ディレクトリの不要になったイメージを自動的に削除します。 自動起動させる予定がなくても、「コンテナ起動設定ファイルを作成する」 を参考にして、 /etc/atmark/containers/*.conf を使ってください。 set_autostart no を設定することで自動実行されません。 |
6.2.2.17. イメージを SWUpdate で転送する
イメージをファイルに保存する:
[armadillo ~]$ podman image save -o <myimage>.tar <localimage>
ファイルをSWUpdateのイメージに入れる。
二つのやり方があります:
SWUイメージ内に組み込む
[ATDE ~/mkswu]$ cp /usr/share/mkswu/examples/embed_container_nginx.desc .
[ATDE ~/mkswu]$ cp -r /usr/share/mkswu/examples/nginx_start .
[ATDE ~/mkswu]$ cat embed_container_nginx.desc
swdesc_option version=1
swdesc_embed_container "nginx_alpine.tar"
swdesc_files --extra-os nginx_start
[ATDE ~/mkswu]$ podman pull --arch arm64 docker.io/nginx:alpine
[ATDE ~/mkswu]$ podman run --rm docker.io/nginx:alpine uname -m
aarch64
[ATDE ~/mkswu]$ podman save docker.io/nginx:alpine > nginx_alpine.tar
[ATDE ~/mkswu]$ mkswu embed_container_nginx.desc
Enter pass phrase for /home/atmark/mkswu/swupdate.key:
embed_container_nginx.swu を作成しました
USBドライブに保存する
[ATDE ~/mkswu]$ cp /usr/share/mkswu/examples/usb_container_nginx.desc .
[ATDE ~/mkswu]$ cp -r /usr/share/mkswu/examples/nginx_start .
[ATDE ~/mkswu]$ cat usb_container_nginx.desc
swdesc_option version=1
swdesc_usb_container "nginx_alpine.tar"
swdesc_files --extra-os nginx_start
[ATDE ~/mkswu]$ podman pull --arch arm64 docker.io/nginx:alpine
[ATDE ~/mkswu]$ podman run --rm docker.io/nginx:alpine uname -m
aarch64
[ATDE ~/mkswu]$ podman save docker.io/nginx:alpine > nginx_alpine.tar
[ATDE ~/mkswu]$ mkswu -o usb_container_nginx.swu usb_container_nginx.desc
Enter pass phrase for /home/atmark/mkswu/swupdate.key:
以下のファイルをUSBメモリにコピーしてください:
'/home/atmark/mkswu/usb_container_nginx.swu'
'/home/atmark/mkswu/nginx_alpine.tar'
'/home/atmark/mkswu/.usb_container_nginx/nginx_alpine.tar.sig'
usb_container_nginx.swu を作成しました。
6.2.2.18. 開発時に有用な—privilegedオプションコンテナに、全権限と全てのデバイスへのアクセスを許可するオプション --privileged があります。このオプションを利用すると、コンテナに与えるべき最小の権限を洗い出す必要が無いため、開発時に有用です。 実運用の際、このオプションを利用することはセキュリティー上問題がある為、開発時にのみご利用ください。コンテナに必要な最低限の権限を与えることをおすすめします。 6.2.3. コンテナとコンテナに関連するデータを削除する | |
|---|
全てのコンテナとコンテナイメージ、コンテナに関するデータが削除されるため、充分に注意して使用してください。 |
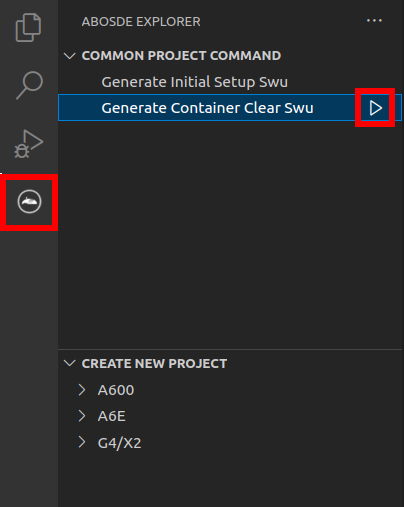
VS Code 上で ABOSDE(Armadillo Base OS Development Environment) から、
Armadillo のコンテナイメージを全て削除する SWU イメージを作成することができます。 VS Code の左ペインの [COMMON PROJECT COMMAND] から [Generate Container Clear Swu] を実行すると、SWU イメージが作成されます。
SWU イメージは ~/mkswu/container_clear.swu に保存されます。 この SWU イメージを 「SWU イメージのインストール」 を参照して Armadillo へインストールしてください。 abos-ctrl container-clear を使用すると、コンテナ、コンテナイメージ、コンテナに関するデータを削除することができます。
abos-ctrl container-clear は以下の通り動作します。
Armadillo Base OSでは、/etc/atmark/containers/*.confファイルに指定されているコンテナがブート時に自動的に起動します。
nginx.confの記載例を以下に示します。 .conf ファイルに設定可能なパラメーターの説明を以下に記載します。
podman_start --long-help コマンドでも詳細を確認できます。
set_image [イメージ名]
イメージの名前を設定できます。 例: set_image docker.io/debian:latest, set_image localhost/myimage イメージをrootfsとして扱う場合に --rootfs オプションで指定できます。 例: set_image --rootfs /var/app/volumes/debian add_ports [ホストポート]:[コンテナポート]
設定したポートで外部からコンテナへのアクセスが可能となります。 デフォルトはTCPで、UDPも /udp を付けて使えます。スペースで分けて複数のポートを設定することができます。 以下の例では、ポート80、443(web)、UDPの69(tftp)にアクセスすることができ、コンテナのポート22(ssh)にはポート2222からアクセスすることができます。 例: add_ports 80:80 443:443 2222:22 69:69/udp | |
|---|
pod を使う場合、このオプションはpodの設定にしないと有効になりませんのでご注意ください。 |
add_devices [ホストパス]:[コンテナパス]
コンテナでデバイスを作成して、使用可能となります。 コンテナパスを設定しない場合はホストと同じパスを使います。 複数のデバイスを作成したい場合はスペースで分けて設定してください。 例: add_devices /dev/galcore /dev/v4l/by-id/usb-046d_HD_Pro_Webcam_C920_78DA8CAF-video-index0:/dev/video3 ホストパスに「:」を含む場合は add_device "[ホストパス]" "[コンテナパス]" で追加できます。 例: add_device "/dev/v4l/by-path/platform-xhci-hcd.1.auto-usb-0:1.1:1.0-video-index1" "/dev/video3" コンテナパスに「:」を含むようなパスは設定できません。 add_volumes [ホストパス]:[コンテナパス]:[オプション]
指定するパスをコンテナ内でマウントして、データの保存や共有ができます。 ホストパスは以下のどれかを指定してください。
/var/app/rollback/volumes/<folder> か <folder>:
アップデートの際に新しくコピー(snapshot)した場合、コピー先のみ変更しますので、
アップデート中でもこのデータを使うことができます。
途中で電源が落ちた場合でも、このデータに影響はありません。 SWUpdateでアップデートするデータに向いています。
/var/app/volumes/<folder>: appパーティションに書きます。
アップデートの際にコピーされませんので、アップデート中の新たな変更は
更新されたコンテナ内のアプリケーションで見れます。 ログやデータベースに向いています。 -
/tmp/<folder>: 複数のコンテナでメモリファイルシステムを共有したい場合に使ってください。
-
/opt/firmware: 学習能力に必要なファムウェアライブラリーのパス。
コンテナパスを設定しない場合はホストパスと同じパスを使います。 オプションは podman run の --volume のオプションになりますので、 ro (read-only), nodev, nosuid, noexec, shared, slave 等を設定できます。 例:add_volumes /var/app/volumes/database:/database: ロールバックされないデータを/databaseで保存します。 例: add_volumes assets:/assets:ro,nodev,nosuid /opt/firmware: アプリケーションのデータを/assetsで読み取り、/opt/firmwareのファームウェアを使えます。 「:」はホスト側のパスとコンテナの側のパスを分割する意味があるため、ファイル名に「:」を使用することはできません。
ホスト側のパスにのみ「:」が含まれてる場合は「 add_volumes "[ホストパス]" "[コンテナパス]" "[オプション]" 」と指定することで設定できます。 | |
|---|
複数のコンテナでマウントコマンドを実行することがあれば、shared のフラグで起動後のマウントを共有することができます。
|
マウントを行うコンテナに shared の設定とマウント権限 (SYS_ADMIN) を与えます。
| |
マウントを使うコンテナに slave だけを設定すれば一方にしか共有されません。
| |
USB デバイスをマウントします。
| |
マウントされたことを確認します。
|
|
add_hotplugs [デバイスタイプ]
コンテナ起動後に挿抜を行なっても認識される(ホットプラグ)デバイスを設定できます。 通常、コンテナ内からデバイスを扱うためには、あらかじめ Armadillo 本体に当該のデバイスを接続した状態で、コンテナを起動する必要がありますが、 add_hotplugs を使用することでホットプラグに対応できます。 例: add_hotplugs input add_hotplugs に指定できる主要な文字列とデバイスファイルの対応について、表6.1「add_hotplugsオプションに指定できる主要な文字列」に示します。
表6.1 add_hotplugsオプションに指定できる主要な文字列 | 文字列 | 引数の説明 | 対象のデバイスファイル |
|---|
input | マウスやキーボードなどの入力デバイス | /dev/input/mouse0, /dev/input/event0 など | video4linux | USB カメラなどの video4linux デバイスファイル | /dev/video0 など | sd | USB メモリなどの SCSI ディスクデバイスファイル | /dev/sda1 など |
表6.1「add_hotplugsオプションに指定できる主要な文字列」に示した文字列の他にも、/proc/devicesの数字から始まる行に記載されている文字列を指定することができます。
図6.37「/proc/devicesの内容例」に示す状態の場合、デバイスタイプを示す文字列としては、各行の先頭の数字を除いた mem や pty などを指定できることがわかります。 デバイスタイプと実際のデバイスファイルの対応については、 カーネルドキュメント: devices.txt(Github) を参照してください。 複数のデバイスタイプを指定したい場合はスペースで分けて設定してください。 例: add_hotplugs input video4linux sd set_network [ネットワーク名]
この設定に「networkの作成」で作成したネットワーク以外に none と host の特殊な設定も選べます。 none の場合、コンテナに localhost しかないネームスペースに入ります。
host の場合はOSのネームスペースをそのまま使います。
例: set_network mynetwork set_ip [アドレス]
コンテナの IP アドレスを設定することができます。 例: set_ip 10.88.0.100 | |
|---|
コンテナ間の接続が目的であれば、podを使ってlocalhostかpodの名前でアクセスすることができます。 |
set_readonly yes
コンテナ内からのファイルシステムへの書き込み許可を設定します。 デフォルトで書き込み可能となっています。 コンテナ内からのファイルシステムへの書き込みを禁止することで、
tmpfs として使うメモリの消費を明示的に抑えることができますが、
アプリケーションによっては読み込み専用のファイルシステムでは動作しない可能性もあります。 6.2.4.11. イメージの自動ダウンロード設定set_pull [設定]
この設定を missing にすると、イメージが見つからない場合にイメージを自動的にダウンロードします。 always にすると、イメージがすでにダウンロード済みでも起動前に必ず更新の確認を取ります。
デフォルトでは never で、イメージが見つからない場合にエラーを表示します。 例:set_pull missing か set_pull always set_restart [設定]
コンテナが停止した時にリスタートさせます。 podman kill か podman stop で停止する場合、この設定と関係なくリスタートしません。
デフォルトで on-failure になっています。 例: set_restart always か set_restart no 6.2.4.13. 信号を受信するサービスの無効化set_init no
コンテナのメインプロセスが PID 1 で起動していますが、その場合のデフォルトの信号の扱いが変わります: SIGTERM などのデフォルトハンドラが無効です。 そのため、init 以外のコマンドを set_command で設定する場合は podman-init のプロセスを PID 1 として立ち上げて、設定したコマンドをその子プロセスとして起動します。 例: set_init no 6.2.4.14. podman logs 用のログサイズ設定set_log_max_size <サイズ>
podman logs でログを表示するために /run にログファイルを保存しています。
そのログのサイズが設定したサイズを越えるとクリアされます。デフォルトは「1MB」です。 6.2.4.15. podman のフックの仕組みadd_hook --stage <ステージ> [--] コマンド [コマンド引数]
コンテナが起動されるなど、動作ステージの変化をフックとしてコマンドを実行します。
複数のステージで実行したい場合は --stage オプションを複数設定してください。 指定可能なステージは precreate, prestart, createRuntime, createContainer, startContainer, poststart, と poststop です。
ステージの意味や使用方法の詳細は podman のドキュメンテーションを参照してください。 | |
|---|
Armadillo Base OS 3.19.1-at.4 現在では set_restart によるコンテナの再起動でも 1 度目の停止時のみ poststop フックが実行されます。
2 度目以降の停止では実行されませんのでご注意ください。 |
set_healthcheck [引数] [--] コマンド [コマンド引数]
定期的にコマンドを実行して、コンテナの正常性を確認します。
指定可能な引数は以下のとおりです: また、いくつかのタイミングでコマンドを実行させることができます: -
set_healthcheck_start_command コマンド [コマンド引数]: コンテナ起動後にヘルスチェックが初めて成功した際に実行されるコマンドです。
-
set_healthcheck_fail_command コマンド [コマンド引数]: ヘルスチェックが retries 回失敗した後に実行されるコマンドです。このコマンドは set_healthcheck の --action 設定の前に実行されますので、コマンドだけを実行したい場合は --action none で無効化してください。
-
set_healthcheck_recovery_command コマンド [コマンド引数]: ヘルスチェックが retries 回失敗した後に再び成功した際に実行されるコマンドです。コンテナを起動する際に成功せずに失敗した場合は、その 1 回目の成功の際に set_healthcheck_start_command で設定されたコマンドのみが実行されます。
例: set_healtcheck -- curl -s --fail http://localhost:8080/status
例: set_healthcheck_start_command abos-ctrl rollback-clone set_autostart no または set_autostart create
Armadillo の起動時にコンテナを自動起動しないように設定できます。 create を指定した場合はコンテナは生成されており、podman start <name> で起動させることができます。
no を指定した場合は podman_start <name> で起動させることができます。
| |
|---|
コンフィグに記載していないイメージはアップデートの際に削除されますので、そういったイメージに対して設定してください。 |
set_command [コマンド]
コンテナを起動するときのコマンド。設定されなかった場合、コンテナイメージのデフォルトを使います。 例: set_command /bin/sh -c "echo bad example" 6.2.4.19. podman run に引数を渡す設定add_args [引数]
ここまでで説明した設定項目以外の設定を行いたい場合は、この設定で podman run に直接引数を渡すことができます。 例:add_args --cap-add=SYS_TTY_CONFIG --env=XDG_RUNTIME_DIR=/run/xdg_home 6.2.5. アットマークテクノが提供するイメージを使うアットマークテクノは、動作確認環境として使用できる Debian ベースのイメージを提供しています。
ここでは以下の 3 つの手順について説明します。 -
ABOSDE からインストールする方法
-
Docker ファイルからイメージをビルドする方法
-
すでにビルド済みのイメージを使う方法
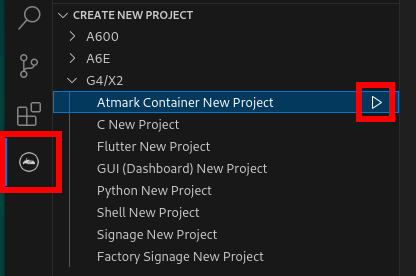
6.2.5.1. ABOSDE からインストールする
インストール用のプロジェクトを作成する
VS Code の左ペインの [G4/X2] から [Atmark Container New Project] を実行し、
表示されるディレクトリ選択画面からプロジェクトを保存するディレクトリを選択してください。
保存先を選択すると、プロジェクト名を入力するダイアログが表示されるので、
任意のプロジェクト名を入力してエンターキーを押してください。
この操作により、選択した保存先に、入力したプロジェクト名と同名のディレクトリが作成されます。 また、ここでは次のように設定しています。 -
保存先 : ホームディレクトリ
プロジェクト名 : my_project
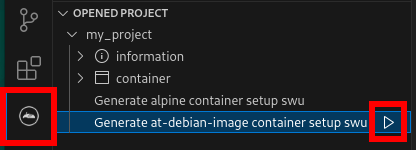
SWU イメージを作成する
VS Code の左ペインの [my_project] から [Generate at-debian-image container setup swu] を実行してください。
作成した SWU ファイルは container_setup/at-debian-image/at-debian-image.swu に保存されています。
この SWU イメージを 「SWU イメージのインストール」 を参照して Armadillo へインストールしてください。
SBOM 生成に関わる設定を行う
ABOSDE から作成した場合は SBOM が同時に生成されます。
詳細は 「SBOM 生成に関わる設定を行う」 をご確認ください。
SBOM の生成には以下の二つのファイルが必要です。 -
コンフィグファイル
desc ファイル
SBOM の生成にはライセンス情報を示したコンフィグファイルを使用します。
コンフィグファイルは container_setup/at-debian-image.sbom_config.yaml.tmpl になります。
SWU イメージ作成時にこのコンフィグファイルからバージョン番号をアップデートした container_setup/at-debian-image.sbom_config.yaml が生成されます。 リリース時にはコンフィグファイルの内容を確認し、正しい内容に変更してください。
各項目の詳細な説明については SPDX specification v2.2.2 (https://spdx.github.io/spdx-spec/v2.2.2/) をご覧ください。
SBOM に含めるコンテナイメージ等の情報については desc ファイルに記載されています。
各項目の説明については 「desc ファイルを編集する」 をご覧ください。
6.2.5.2. Docker ファイルからイメージをビルドするArmadillo-IoT ゲートウェイ G4 コンテナ から
「Debian [VERSION] サンプル Dockerfile」 ファイル (at-debian-image-dockerfile-[VERSION].tar.gz) をダウンロードします。
その後 podman build コマンドを実行します。 podman images コマンドにより at-debian-image がビルドされたことが確認できます。
library/debian イメージはベースとなっている Debian イメージです。 Armadillo-IoT ゲートウェイ G4 コンテナ から
「Debian [VERSION] サンプルコンテナイメージ」 ファイル (at-debian-image-[VERSION].tar) をダウンロードします。
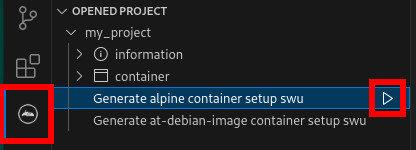
その後 podman load コマンドを実行します。 podman images コマンドにより at-debian-image がビルドされたことが確認できます。 6.2.6. alpine のコンテナイメージをインストールするalpine のコンテナイメージは、 ABOSDE を用いてインストールすることが可能です。
「ABOSDE からインストールする」 を参照して、 インストール用のプロジェクトを作成しておいてください。 VS Code の左ペインの [my_project] から [Generate alpine container setup swu] を実行してください。 作成した SWU ファイルは container_setup/alpine/alpine.swu に保存されています。
この SWU イメージを 「SWU イメージのインストール」 を参照して Armadillo へインストールしてください。 6.2.6.1. SBOM 生成に関わる設定を行うABOSDE から作成した場合は SBOM が同時に生成されます。
詳細は 「SBOM 生成に関わる設定を行う」 をご確認ください。
SBOM の生成には以下の二つのファイルが必要です。 SBOM の生成にはライセンス情報を示したコンフィグファイルを使用します。
コンフィグファイルは container_setup/alpine.sbom_config.yaml.tmpl になります。
SWU イメージ作成時にこのコンフィグファイルからバージョン番号をアップデートした container_setup/alpine.sbom_config.yaml が生成されます。 リリース時にはコンフィグファイルの内容を確認し、正しい内容に変更してください。
各項目の詳細な説明については SPDX specification v2.2.2 (https://spdx.github.io/spdx-spec/v2.2.2/) をご覧ください。
SBOM に含めるコンテナイメージ等の情報については desc ファイルに記載されています。
各項目の説明については 「desc ファイルを編集する」 をご覧ください。 この章では、コンテナ内のネットワークを扱う方法について示します。 6.2.7.1. コンテナの IP アドレスを確認する基本的にコンテナの IP アドレスは Podman イメージからコンテナを作成したときに自動的に割り振られます。
コンテナに割り振られている IP アドレスはホスト OS 側からは podman inspect コマンドを用いて、以下のように確認することができます。 コンテナ内の ip コマンドを用いて確認することもできます。 6.2.7.2. コンテナに固定 IP アドレスを設定する | |
|---|
podman はデフォルトで 10.88.0.0/16 を使います。 他に使用しているIPアドレスと被った場合等はコンテナに別のIPアドレスを設定してください。 |
コンテナに固定 IP アドレスを設定するためには、最初にユーザ定義のネットワークを作成する必要があります。
以下に 192.168.1.0/24 にユーザ定義のネットワークを作成する例を示します。 コンテナを作成する際に、上記で作成したネットワークと設定したい IP アドレスを渡すことで、
コンテナの IP アドレスを固定することができます。
以下の例では、IPアドレスを 192.168.1.10 に固定します。 コンテナの IP アドレスが、192.168.1.10 に設定されていることが確認できます。 この章では、コンテナ内で様々なサーバを構築する方法について示します。
この章で取り上げているサーバは alpine の apk コマンドでインストールすることが可能です。 ここでは、HTTP サーバとして Apache と lighttpd の 2 種類を使用する場合について説明します。 alpine イメージからコンテナを作成し、そのコンテナ内に Apache をインストールします。
コンテナ作成の際に、ホスト OS の 8080 番ポートをコンテナ内の 80 番ポートに転送する指定を行っています。 他の PC などの Web ブラウザから、ホスト OS の IP アドレスの 8080 番ポートに接続すると、
動作確認用ページが表示されます。
デフォルトでは、/var/www/localhost/htdocs ディレクトリにファイルを置くことで Web ブラウザから閲覧できます。
Apache の詳細な設定は、/etc/apache2 ディレクトリにある設定ファイルを編集することで変更可能です。 alpine イメージからコンテナを作成し、そのコンテナ内に lighttpd をインストールします。
コンテナ作成の際に、ホスト OS の 8080 番ポートをコンテナ内の 80 番ポートに転送する指定を行っています。 lighttpd はデフォルトでは動作確認用ページが用意されていないため、上記の手順では簡単なページを
/var/www/localhost/htdocs ディレクトリの下に配置しています。
他の PC などの Web ブラウザから、ホスト OS の IP アドレスの 8080 番ポートに接続すると表示されます。
lighttpd の詳細な設定は、/etc/lighttpd ディレクトリにある設定ファイルを編集することで変更可能です。 ここでは、FTP サーバとして vsftp を使用する場合について説明します。
alpine イメージからコンテナを作成し、そのコンテナ内に vsftpd をインストールします。
コンテナ作成の際に、FTP 通信で使用するポートについてホスト OS 側からコンテナ内のポートに転送する指定と、
コンテナ内の環境変数として PASV_ADDRESS にホスト OS 側の IP アドレスの指定を行っています。 コンテナ内にユーザアカウントを作成し、このユーザで ftp ログインできるようにします。 作成したユーザで ftp ログインできるように、vsftpd の設定ファイルを編集します。 編集した設定ファイルを指定して vftpd を起動することにより、ftp 接続可能となります。
ftp ログイン時のアカウントは前述の手順で作成したものを使用します。 ここでは、Samba サーバの構築方法について説明します。
alpine イメージからコンテナを作成し、そのコンテナ内に samba をインストールします。
コンテナ作成の際に、samba で使用するポートについてホスト OS 側からコンテナ内のポートに転送する指定を行っています。 コンテナ内にユーザアカウントを作成し、このユーザで samba にログインできるようにします。 samba を起動すると、前述の手順で作成したユーザアカウントで他の PC などからログインすることができます。 共有するディレクトリの指定などの詳細設定は /etc/samba/smb.conf ファイルを編集することで変更可能です。 ここでは、RDMS として sqlite を使用する場合について説明します。
alpine イメージからコンテナを作成し、そのコンテナ内に sqlite をインストールします。 コンテナ内に入り、sqlite3 コマンドを実行すると sqlite のプロンプトが表示され
データベースの操作ができるようになります。 この章では、コンテナ内で動作するアプリケーションから Armadillo-IoT ゲートウェイ G4 に接続されたディスプレイに
出力を行う方法について示します。 コンテナ内から、Wayland のコンポジタである weston を起動し画面表示を行う例を示します。
ここではアットマークテクノが提供するイメージからコンテナを作成します。
このイメージに関しては 「アットマークテクノが提供するイメージを使う」 を参照してください。 |
weston の実行に必要な環境変数を設定します。
| |
画面描画に必要なデバイスを設定します。
| |
キーボードやマウスなどを使用可能にするためのデバイスを設定します。
| |
ホスト OS 側の /run/udev をコンテナ内からマウントするように設定します。
| |
ホスト OS 側の /opt/firmware をコンテナ内からマウントするように設定します。
| 
|
tty を操作するための権限を設定します。
| 
|
weston を起動します。ここで設定する tty は add_devices の tty7 を使います。
|
次に、以下のように weston を起動します。オプションである --tty に設定する値は、
コンテナ作成時に渡した tty の数字にします。 Armadillo-IoT ゲートウェイ G4 に接続しているディスプレイ上に、デスクトップ画面が表示されます。 アットマークテクノが提供するイメージでは、weston の設定ファイルは
/etc/xdg/weston/weston.ini に配置してあります。 |
この行でHDMIモニタに出力する画像の解像度指定を行うことができます。初期値は1920x1080です。
|
| |
|---|
weston.ini で解像度を指定しない場合や、指定した解像度にモニタが対応していない場合は、モニタが対応している別な解像度に自動的に切り替わります。
その場合、意図しない解像度で描画されることがあります。
GUIアプリケーションの描画の乱れにつながる場合がありますので、予め使用するモニタに合わせて解像度を指定しておくことをお勧めします。 |
| |
|---|
設定ファイルを更新するにはコンテナイメージを新しく保存することもできますが、
ボリュームを使ってこのファイルだけを更新することができます。
|
コンフィグファイルにボリュームを追加します。 weston_conf は相対パスなので /var/app/rollback/volumes/weston_conf がマウントされます。ボリュームの選択については 「コンテナの変更を保存する」 を参照ください。
| |
コンフィグをコピーします。
| |
コンテナを再起動させます。
| |
動作確認ができた後にコンフィグファイルを保存します。
|
|
コンテナの管理として、一つのコンテナで一つのアプリケーションを動かす事を推奨します。 一つのコンテナでwestonを起動して、
XDG_RUNTIME_DIRを共有することで別のコンテナでwestonを使用する
アプリケーションを起動させることは以下のコンフィグで可能です。 [armadillo ~]# vi /etc/atmark/containers/weston.conf
set_image localhost/at-debian-image:latest
add_devices /dev/dri /dev/galcore /dev/input /dev/tty7
add_volumes /run/udev:/run/udev:ro /opt/firmware:/opt/firmware:ro
add_volumes /tmp/xdg_home:/run/xdg_home
add_args --env=XDG_RUNTIME_DIR=/run/xdg_home
add_args --cap-add=SYS_TTY_CONFIG
set_command weston --tty=7
[armadillo ~]# vi /etc/atmark/containers/detect_object.conf
set_image localhost/at-debian-image:latest
add_devices /dev/galcore /dev/video3
add_volumes /opt/firmware:/opt/firmware:ro /tmp/xdg_home:/run/xdg_home
set_restart always
add_args --env=XDG_RUNTIME_DIR=/run/xdg_home
set_command /root/start_detect_object.sh
[armadillo ~]# podman_start weston
[armadillo ~]# podman_start detect_object |
westonの設定ファイルを作成します。
| |
XDG_RUNTIME_DIR を volume で共有して、同じディレクトリを使います。
| |
例としてdetect_objectという名前のクライアントの設定ファイルを作成します。ここでは任意の名前を設定できます。
| |
アプリケーションによっては、westonが異常終了した時にエラーを出力しない場合があるため、set_restart always にします。
| |
確認のためコンテナを手動で起動します。
|
アットマークテクノが提供するイメージ at-debian-image にはデフォルトで atmark ユーザが存在しています。
at-weston-launch コマンドを使うと、 root ユーザではなく atmark ユーザで weston を起動することができます。 [armadillo ~]# vi /etc/atmark/containers/weston.conf
set_image localhost/at-debian-image:latest
add_devices /dev/dri /dev/galcore /dev/input /dev/tty7
add_volumes /run/udev:/run/udev:ro /opt/firmware:/opt/firmware:ro
add_volumes /tmp/xdg_home:/run/xdg_home
add_args --env=XDG_RUNTIME_DIR=/run/xdg_home
add_args --cap-add=SYS_TTY_CONFIG
set_command at-weston-launch --tty /dev/tty7 --user atmark
[armadillo ~]# podman_start weston |
westonの設定ファイルを作成します。
| |
使用する tty として /dev/tty7 を追加します。
| |
at-weston-launch コマンドのオプションとして使用する tty とユーザ名を渡します。
| |
確認のためコンテナを手動で起動します。
|
--tty と --user を指定しなかった場合は、デフォルトで /dev/tty7 と atmark ユーザが使われます。 weston を起動する際に、--debug オプションを渡すと weston-screenshooter コマンドでスクリーンショットを
保存することができます。 [armadillo ~]# vi /etc/atmark/containers/weston.conf
set_image localhost/at-debian-image:latest
add_devices /dev/dri /dev/galcore /dev/input /dev/tty7
add_volumes /run/udev:/run/udev:ro /opt/firmware:/opt/firmware:ro
add_volumes /tmp/xdg_home:/run/xdg_home
add_args --env=XDG_RUNTIME_DIR=/run/xdg_home
add_args --cap-add=SYS_TTY_CONFIG
set_command weston --tty=7 --debug
[armadillo ~]# podman_start weston
[armadillo ~]# podman exec -it weston /bin/bash
[container ~]# weston-screenshooter
[container ~]# ls
wayland-screenshot-[date].png |
westonの設定ファイルを作成します。
| |
--debug オプションを渡します。
| |
確認のためコンテナを手動で起動します。
| |
起動した weston コンテナ内で /bin/bash を起動してログインします。
| |
weston-screenshooter コマンドを実行します。
| |
カレントディレクトリ内に wayland-screenshot-[date].png というファイル名で保存されます。
|
| |
|---|
--debug オプションは開発時にのみ使用してください。正式運用時の使用は非推奨です。 |
| |
|---|
Armadillo-IoT ゲートウェイ G4 にキーボードを接続している場合は、--debug オプションを渡さなくても
Windows キー + s を押下することによりスクリーンショットを保存することができます。
この場合、スクリーンショットはコンテナ内の /proc/[weston の PID]/cwd 下に保存されます。 |
6.2.9.2. X Window System を扱うコンテナ内から、X Window System を起動し画面表示を行う例を示します。
ここではアットマークテクノが提供するイメージからコンテナを作成します。
このイメージに関しては 「アットマークテクノが提供するイメージを使う」 を参照してください。 |
X Window System に必要な tty を設定します。どこからも使われていない tty とします。
| |
画面描画先となるフレームバッファを設定します。
| |
キーボードやマウスなどを使用可能にするためのデバイスを設定します。
| |
ホスト OS 側の /run/udev をコンテナ内からマウントするように設定します。
| |
X Window System の動作に必要な権限を設定します。
|
次に、以下のように X Window System を起動します。
オプションである vt に設定する値は、コンテナ作成時に渡した tty の数字にします。 Armadillo-IoT ゲートウェイ G4 に接続しているディスプレイ上に、デスクトップ画面が表示されます。 コンテナ内で動作するアプリケーションからフレームバッファに直接描画するためには、Podman のイメージからコンテナを作成する際にホスト OS 側の
デバイスファイル /dev/fbN を渡す必要があります。以下は、/dev/fb0 を渡して alpine イメージからコンテナを作成する例です。 コンテナ内に入って、ランダムデータをフレームバッファに描画する例を以下に示します。
これにより、接続しているディスプレイ上の表示が変化します。 タッチパネルが組み込まれているディスプレイを接続している環境で、
コンテナ内からタッチイベントを取得するためには、Podman のイメージからコンテナを作成する際に
ホスト OS 側の /dev/input を渡す必要があります。 Wayland などの GUI 環境と組み合わせて使うことで、タッチパネルを利用した GUI アプリケーションの操作が可能となります。 Armadillo-IoT ゲートウェイ G4 で採用している i.MX 8M Plus には、動画のエンコード/デコード処理に特化した演算ユニットである
VPU (Video Processing Unit) が搭載されています。
VPU を活用することでシステム全体のパフォーマンスを落とすことなく、動画のエンコード/デコード処理を行うことができます。
コンテナ内で動作するアプリケーションから VPU を扱うためには、コンテナ作成時にデバイスとして、
/dev/mxc_hantro と /dev/mxc_hantro_vc8000e および /dev/ion を渡す必要があります。
ここではアットマークテクノが提供するイメージからコンテナを作成します。
このイメージに関しては 「アットマークテクノが提供するイメージを使う」 を参照してください。 weston と GStreamer がインストール済みのイメージと組み合わせて使うことで、
VPU を使用して動画のエンコード/デコードを行うことができます。 このようにして作成したコンテナにログインすると、
GStreamer で VPU を使用した動画のエンコード/デコードが行なえます。 USB カメラも組み合わせると、カメラからの映像をエンコードしてファイルに保存することも可能です。 上記を実行することで、USB カメラからの映像が H.264 にエンコードされてファイルに保存されます。この例ではカメラデバイスを /dev/video3 としていますが、
環境によって異なりますので適切なものを設定してください。 この章では、コンテナ内からパワーマネジメント機能を使う方法について示します。 パワーマネジメント機能を使ってサスペンド状態にするには、Podman のイメージからコンテナを作成する際に
ホスト OS 側の /sys ディレクトリを渡す必要があります。
以下は、/sys を渡して alpine イメージからコンテナを作成する例です。ここで渡された /sys ディレクトリは
コンテナ内の /sys にマウントされます。 コンテナ内から、/sys/power/state に次の文字列を書き込むことにより、サスペンド状態にすることができます。 表6.3 対応するパワーマネジメント状態 | パワーマネジメント状態 | 文字列 | 説明 |
|---|
Suspend-to-RAM
| mem
| 最も消費電力を抑えることができる | Suspend-to-Idle
| freeze
| 最も短時間で復帰することができる |
サスペンド状態からの起床要因として、利用可能なデバイスを以下に示します。 -
UART2 (console)
-
起床要因
-
データ受信
-
有効化
[container ~]# echo enabled > /sys/bus/platform/drivers/imx-uart/30890000.serial/tty/ttymxc1/power/wakeup
-
USB
-
起床要因
-
USBデバイスの挿抜
-
有効化
[container ~]# echo enabled > /sys/bus/platform/devices/32f10100.usb/power/wakeup
-
RTC(i.MX8MP)
| |
|---|
RV-8803-C7は、毎分 0 秒にしかアラーム割り込みを発生させることができません。
0 時 0 分 30 秒の時に、1 秒後にアラームが鳴るように設定しても、
実際にアラーム割り込みが発生するのは 0 時 1 分 0 秒となります。 |
-
ユーザースイッチ
-
起床要因
-
ユーザースイッチ押下
-
有効化
[armadillo ~]# vi /boot/overlays.txt
fdt_overlays=armadillo_iotg_g4-sw1-wakeup.dtbo
[armadillo ~]# persist_file -vp /boot/overlays.txt
'/boot/overlays.txt' -> '/mnt/boot/overlays.txt'
Added "/boot/overlays.txt" to /etc/swupdate_preserve_files
[armadillo ~]# reboot
: (省略)
Applying fdt overlay: armadillo_iotg_g4-sw1-wakeup.dtbo
: (省略)
[armadillo ~]# cat /sys/devices/platform/gpio-keys/power/wakeup
enabled |
/boot/overlays.txt ファイルに「armadillo_iotg_g4-sw1-wakeup.dtbo」を追加します。
ファイルが存在しない場合は新規に作成してください。
このファイルの詳細については 「DT overlay によるカスタマイズ」 を参照してください。
| |
/boot/overlays.txt を保存し、アップデートの場合でも保存します。
| |
overlay の実行のために再起動します。
| |
シリアルコンソールの場合に、u-bootによるメッセージを確認できます。
| |
Linux からも確認できます。
|
-
SMS 受信(LTE モデルのみ)
Armadillo-IoT ゲートウェイ G4のパワーマネジメント機能は、LinuxのSPM(System Power Management)およびDPM(Device Power Management)を利用しています。パワーマネジメント状態を省電力モードに遷移させることにより、Armadillo-IoT ゲートウェイ G4の消費電力を抑えることができます。 パワーマネジメント状態を省電力モードに遷移させると、アプリケーションの実行は一時停止し、Linuxカーネルはサスペンド状態となります。起床要因が発生すると、Linuxカーネルのリジューム処理が行われた後、アプリケーションの実行を再開します。 Armadillo-IoT ゲートウェイ G4が対応するパワーマネジメント状態と、/sys/power/stateに書き込む文字列の対応を次に示します。 表6.4 対応するパワーマネジメント状態 | パワーマネジメント状態 | 文字列 | 説明 |
|---|
Suspend-to-RAM
| mem
| Suspend-to-Idleよりも消費電力を抑えることができる | Suspend-to-Idle
| freeze
| suspend-to-ramよりも短時間で復帰することができる |
起床要因として利用可能なデバイスは次の通りです。 -
USBコンソールインターフェース(CON6)
-
起床要因
-
データ受信
-
有効化
[armadillo ~]# echo enabled > /sys/class/tty/ttymxc1/power/wakeup
-
USBインターフェース(CON4)
-
起床要因
-
USBデバイスの挿抜
-
有効化
[armadillo ~]# echo enabled > /sys/devices/platform/soc@0/32f10100.usb/power/wakeup
[armadillo ~]# echo enabled > /sys/bus/usb/devices/usb1/power/wakeup
-
RTC(SNVS_HP Real Time Counter)
-
起床要因
-
アラーム割り込み
-
有効化
デフォルトで有効化されています
-
RTC(RV-8803-C7)
-
起床要因
-
アラーム割り込み
-
有効化
デフォルトで有効化されています
-
EC25-J RI (Ring Indicator)
-
起床要因
-
SMS 受信(LTE モデルのみ)
-
有効化
デフォルトで有効化されています
6.2.11. コンテナからのpoweroff及びrebootArmadillo Base OSはbusybox initでshutdownとrebootを対応します。 busybox initでPID 1にsignalを送ることでshutdownやrebootとなります。
コンテナからsignalを送るように、pid namespaceを共有する必要がありますが、共有されたらkillで実行できます。 この章では、コンテナ内で動作しているアプリケーションに何らかの異常が発生し停止してしまった際に、
ソフトウェアウォッチドッグタイマーを使って、システムを再起動する方法について示します。 6.2.12.1. ソフトウェアウォッチドッグタイマーを扱うコンテナ内で動作するアプリケーションからソフトウェアウォッチドッグタイマーを扱うためには、Podman のイメージからコンテナを作成する際にホスト OS 側の
デバイスファイル /dev/watchdogN を渡す必要があります。以下は、/dev/watchdog0 を渡して alpine イメージからコンテナを作成する例です。 ソフトウェアウォッチドッグタイマーは、プログラム内からデバイスファイル /dev/watchdog0 を open した時点で起動します。
コンテナ内に入ってソフトウェアウォッチドッグタイマーを echo コマンドで起動する例を以下に示します。 ソフトウェアウォッチドッグタイマーを起動した後、/dev/watchdog0 に( V 以外の)任意の文字を書き込むことで
ソフトウェアウォッチドッグタイマーをリセットすることができます。
60 秒間( V 以外の)任意の文字の書き込みがない場合は、システムが再起動します。 ソフトウェアウォッチドッグタイマーを停止したい場合は、/dev/watchdog0 に V を書き込みます。 Armadillo-IoT ゲートウェイ G4 で採用している i.MX 8M Plus には、機械学習に特化した演算処理ユニットである
NPU (Neural Processor Unit) が搭載されています。
NPU を活用することで、顔認識や物体認識などの推論処理を高速に行うことができます。 コンテナ内で動作するアプリケーションから NPU を扱うためには、 アットマークテクノが提供するコンテナイメージである
at-debian-image を使用する必要があります。また、コンテナ作成時にデバイスとして、/dev/galcore を渡す必要があります。
以下は、/dev/galcore を渡して at-debian-image からコンテナを作成する例です。
このイメージに関しては 「アットマークテクノが提供するイメージを使う」 を参照してください。 ![[注記]](images/note.png) | |
|---|
i.MX 8M Plus に搭載されている NPU は INT8 で量子化された学習済みモデルを高速に推論するように設計されています。
INT8 で量子化されていないモデルの場合、正常に推論できない、または推論実行速度の低下が発生する場合があります。 |
具体的な機械学習アプリケーションの開発方法については、NXP Semiconductors の公式サイトを参照してください。 アットマークテクノからも機械学習に関する開発ガイドを公開していますので、そちらも参照してください。
Armadillo Base OS 開発ガイド。 6.2.13.1. ONNX Runtime を使うONNX Runtime は 学習済みの ONNX モデルを使って推論を行うためのソフトウェアです。[]
Armadillo-IoT ゲートウェイ G4 では、NPU を使って ONNX Runtime を実行することができます。 at-debian-image から作成したコンテナであれば、apt install でインストールすることができます。 -
python から ONNX Runtime を使う
python から ONNX Runtime を使うためには onnxruntime モジュールを import します。
また、NPU を使うために InferenceSession オブジェクトを作成する際に、Providers として
「VsiNpuExecutionProvider」を指定します。 以上により、python から ONNX Runtime を使うことができます。 6.2.13.2. TensorFlow Lite を使うTensorFlow Lite からも NPU を使って高速に推論を行うことができます。 -
TensorFlow Lite をインストールする
at-debian-image から作成したコンテナであれば、apt install でインストールすることができます。 -
python から TensorFlow Lite を使う
python から TensorFlow Lite を使うためには Interpreter モジュールを import します。
python から TensorFlow Lite を使う場合は特別な設定をしなくても、自動的に NPU が使われます。 以上により、python から TensorFlow Lite を使うことができます。 | |
|---|
tflite-runtime パッケージと、ライブラリイメージ(imx_lib)のバージョンの組み合わせによっては、使用する delegate と ライブラリの整合性が取れずに TensorFlow Liteを用いたアプリケーションが正しく動作しない場合があります。 バージョン 2.6.0-1 以降の tflite-runtime パッケージを使用する際には、必ずバージョン 2.2.0 以降のライブラリイメージ(imx_lib)を使用してください。 ライブラリイメージのアップデート方法については「VPU や NPU を使用する」を参照してください。 それぞれのバージョンと動作の関係を表6.5「ライブラリと tflite-runtime のバージョンと NPU を用いたアプリケーションの動作の関係」に示します。 表6.5 ライブラリと tflite-runtime のバージョンと NPU を用いたアプリケーションの動作の関係 | | tflite-runtime のバージョンが 2.6.0-1 以降 | tflite-runtime のバージョンが 2.6.0-1 未満 |
|---|
ライブラリのバージョンが確認できる(2.2.0 以降) | VX delegateで動作 | NNAPI delegate で動作 | ライブラリのバージョンが確認できない(2.2.0 未満) | 正しく動作しない場合あり | NNAPI delegate で動作 |
ライブラリのバージョン確認手順については、「ライブラリイメージのバージョンを確認する」を参照してください。 tflite-runtime パッケージのバージョンは、コンテナ内で以下のコマンドを実行することで確認できます。
推奨はしませんが、 tflite-runtime のバージョンを 2.6.0-1 未満に下げたい場合は表6.6「2.6.0-1 未満の TensorFlow Lite 関連 deb パッケージ」に示す deb パッケージを全てコンテナ内にダウンロードして、図6.88「tflite-runtime のバージョンを下げる」のコマンドを実行してください。 表6.6 2.6.0-1 未満の TensorFlow Lite 関連 deb パッケージ
|
| |
|---|
Arm NN はコンテナイメージ at-debian-image のバージョン 1.0.6 以降では、動作非対応となります。
現在利用中の at-debian-image のバージョンは以下のコマンドで確認できます。
|
Arm NN とは TensorFlow Lite および ONNX のモデル形式をサポートしている推論用ソフトウェアです。
Arm NN からも NPU を使って高速に推論を行うことができます。 at-debian-image から作成したコンテナであれば、apt install でインストールすることができます。 python から Arm NN を使うためには pyarmnn モジュールを import します。
また、NPU を使うために BackendId として「VsiNpu」を指定して、Optimize オブジェクトを作成します。 以上により、python から Arm NN を使うことができます。 6.3. swupdateを使用してアップデートする6.3.1. swupdate で可能なアップデートswupdate を実行する目的としては以下が考えられます。
コンテナをアップデートしたい
開発したコンテナのアップデートが可能です。
ユーザーデータディレクトリや Armadillo Base OS のファイルを差分アップデートしたい
ユーザーデータをアップデートする場合は、以下のディレクトリを更新します。 -
/var/app/rollback/volumes
ユーザーディレクトリについては「電源を切っても保持されるディレクトリ(ユーザーデータディレクトリ)」を参照してください。 | |
|---|
SWUpdate による /var/app/volumes の更新は推奨しません。 /var/app/volumes が二面化されていないため、書込みの途中で問題が発生した場合、
不完全な書込みになる恐れがあります。
また、アップデート中にアプリケーションがそのデータに
アクセスすると、書込み中のデータにアクセスすることになります。 /var/app/volumes のデータに対して更新が必要な場合、SWUpdate では /var/app/rollback/volumes に更新するデータを書き込んでください。
その後、次回起動時にアプリケーション側から /var/app/rollback/volumes に書き込んだデータを /var/app/volumes に移動するようにしてください。
|
Armadillo Base OS を一括アップデートしたい
アットマークテクノがリリースする Armadillo Base OS の機能追加、更新、セキュリティパッチの追加が可能です。
ブートローダーをアップデートしたい
アットマークテクノがリリースするブートローダーのアップデートが可能です。
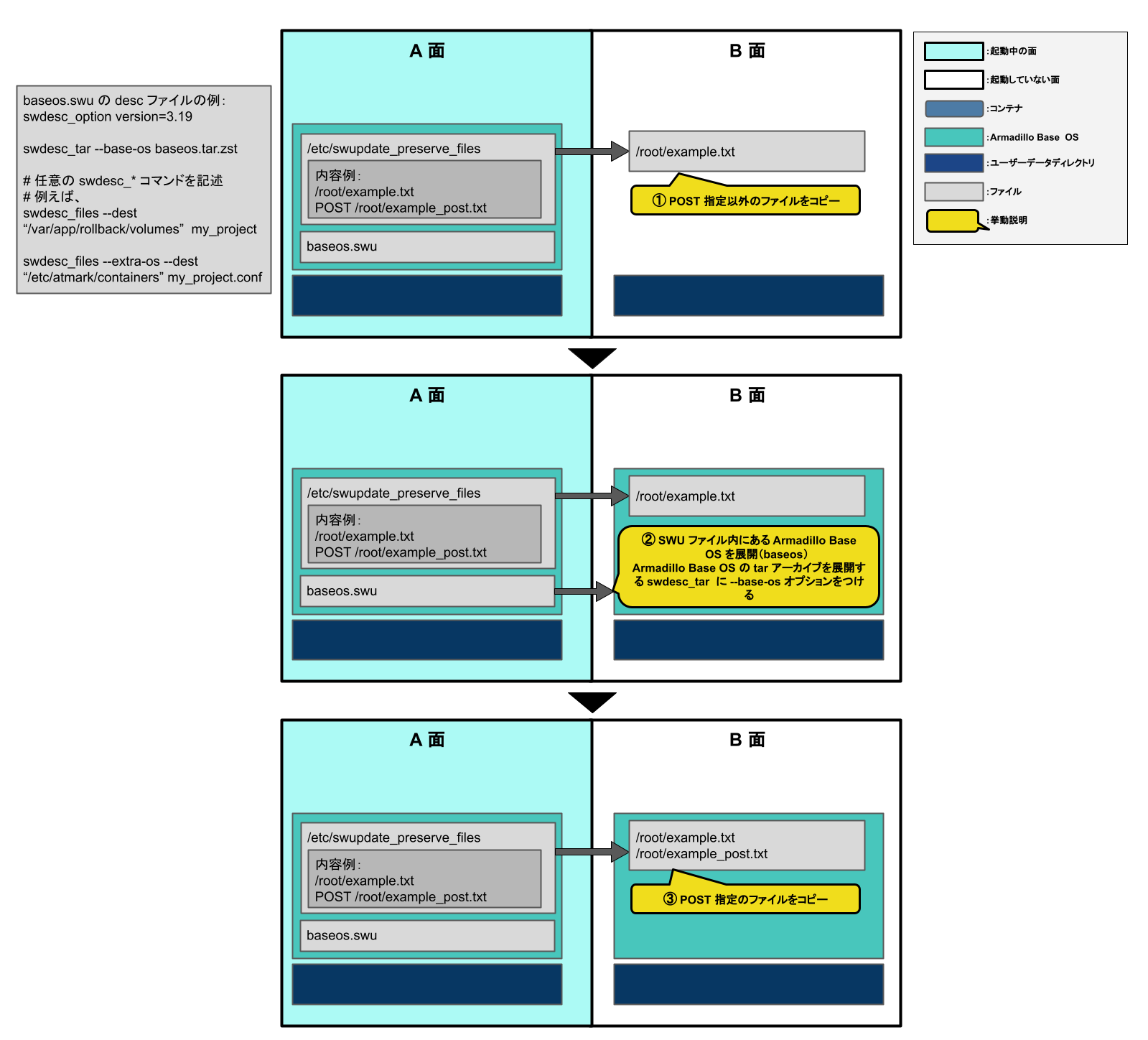
「Armadillo Base OSとは」で示すように、Armadillo Base OS は OS・ブートローダー・コンテナ部分の安全性を担保するため二面化しています。 それにより、万が一アップデートに失敗した場合でも起動中のシステムに影響ありません。 以降、それぞれの目的ごとに swupdate によるアップデートの流れを示します。 6.3.2. コンテナのアップデート、ユーザーデータディレクトリや Armadillo Base OS の差分アップデート以下にアップデートの流れを示します。 ここでは、boot して起動中の面を A 面、アップデート先の面を B 面とします。
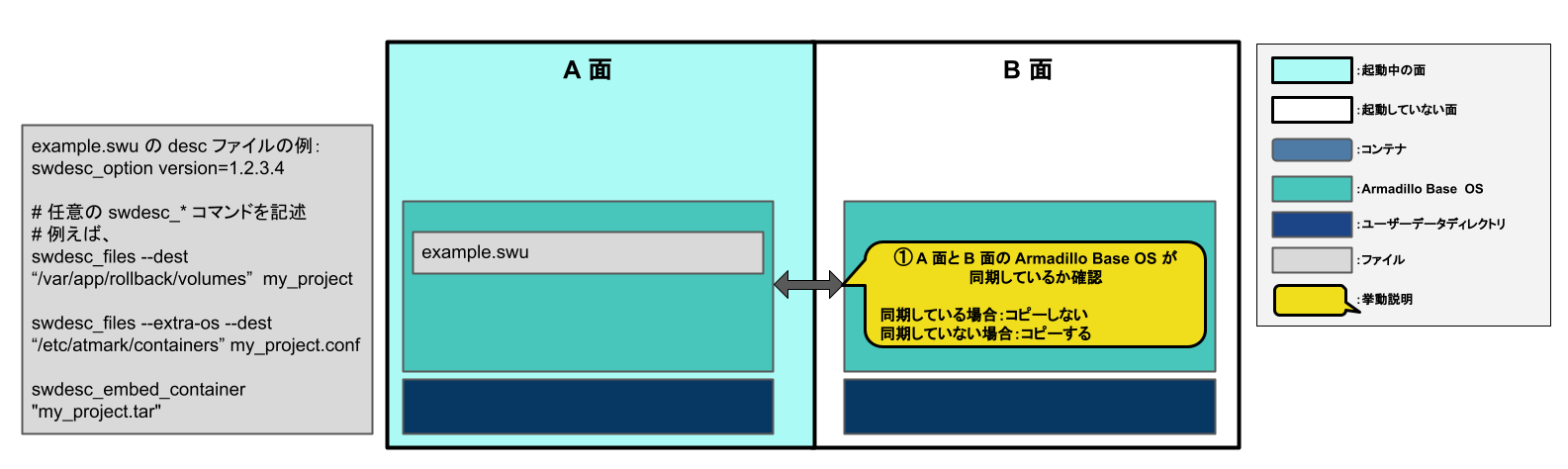
Armadillo Base OS を B 面へコピー
Armadillo Base OS を B 面にコピーする流れを図6.92「Armadillo Base OS を B 面にコピー」に示します。 A 面と B 面の Armadillo Base OS が同期しているか確認します。 同期していない場合、 A 面の Armadillo Base OS を B 面にコピーします。 同期している場合はコピーしません。 swdesc_option version で指定するバージョンの書き方については「インストールバージョンを指定する」を参照してください。
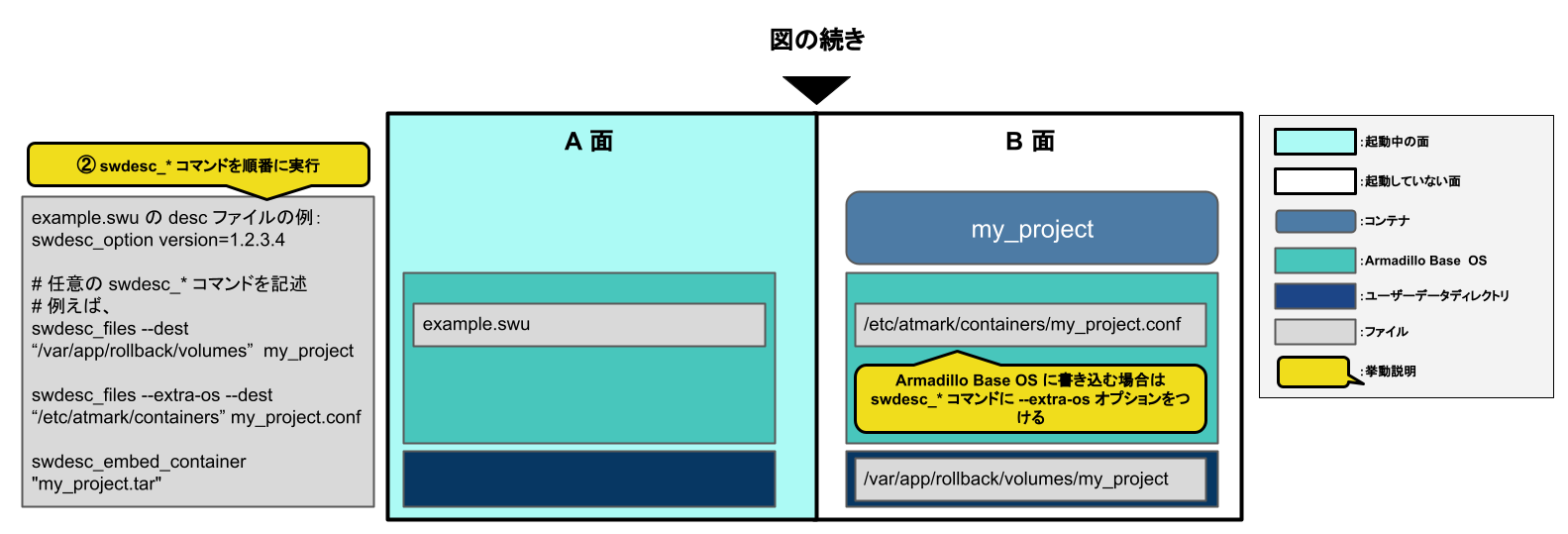
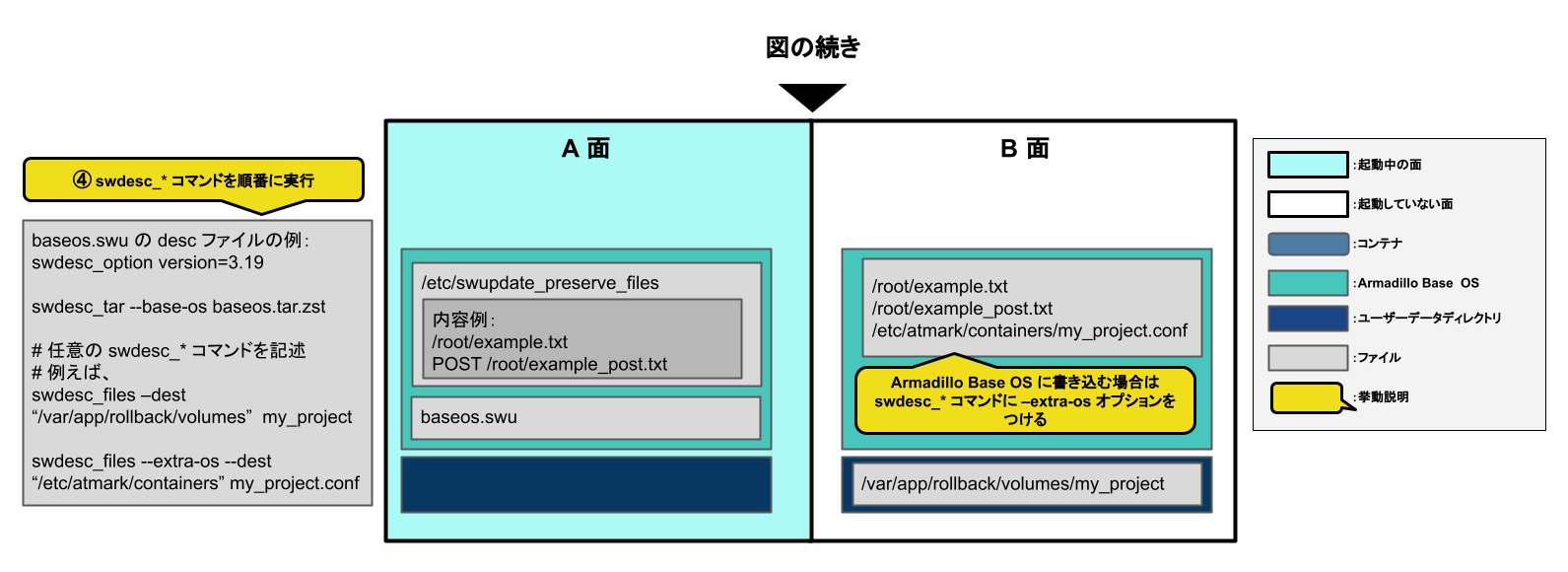
コマンドを順番に実行
図6.93「desc ファイルに記述したswudesc_* コマンドを実行」に示すように、desc ファイルに記述した順番に従って swudesc_* コマンドを実行します。 「インストールバージョンを指定する」に示すように、swdesc_* コマンドによって Armadillo Base OS に対して書き込みをする場合は --extra-os オプションをつけてください。
swudesc_* コマンドの種類を表6.7「swudesc_* コマンドの種類」に示します。 表6.7 swudesc_* コマンドの種類 | おおまかな機能 | コマンド名 | 説明 |
|---|
ファイル転送
参照先:「Armadillo へファイルを転送する」 | swdesc_files | 指定したファイルをアップデート先の環境にコピー | swdesc_tar | 指定した tar アーカイブをアップデート先の環境に展開してコピー | コマンド実行
参照先:「Armadillo 上で任意のコマンドを実行する」 | swdesc_command | 指定したコマンドをアップデート先の環境で実行 | swdesc_script | 指定したスクリプトをアップデート先の環境で実行 | ファイル転送 + コマンド実行
参照先:「Armadillo にファイルを転送し、そのファイルをコマンド内で使用する」 | swdesc_exec | 指定したファイルをアップデート先の環境にコピーした後、そのファイル名を"$1"としてコマンドを実行 | 起動中の面に対してコマンド実行(非推奨)
参照先:「動作中の環境でのコマンドの実行」 | swdesc_command_nochroot | 指定したコマンドを起動中の環境で実行 | swdesc_script_nochroot | 指定したスクリプトを起動中の環境で実行 | 起動中の面に対してファイル転送 + コマンド実行(非推奨)
参照先:「動作中の環境でのコマンドの実行」 | swdesc_exec_nochroot | 指定したファイルを起動中の環境にコピーした後、そのファイル名を"$1"としてコマンドを実行 | コンテナイメージの転送
参照先:「Armadillo にコンテナイメージを転送する」 | swdesc_embed_container | SWU ファイルに含まれるコンテナイメージの tar アーカイブをアップデート先の環境に展開 | swdesc_pull_container | アップデート先の環境でコンテナイメージをダウンロード | swdesc_usb_container | SWU ファイルに含めない形で用意したコンテナイメージの tar アーカイブをアップデート先の環境に展開 |
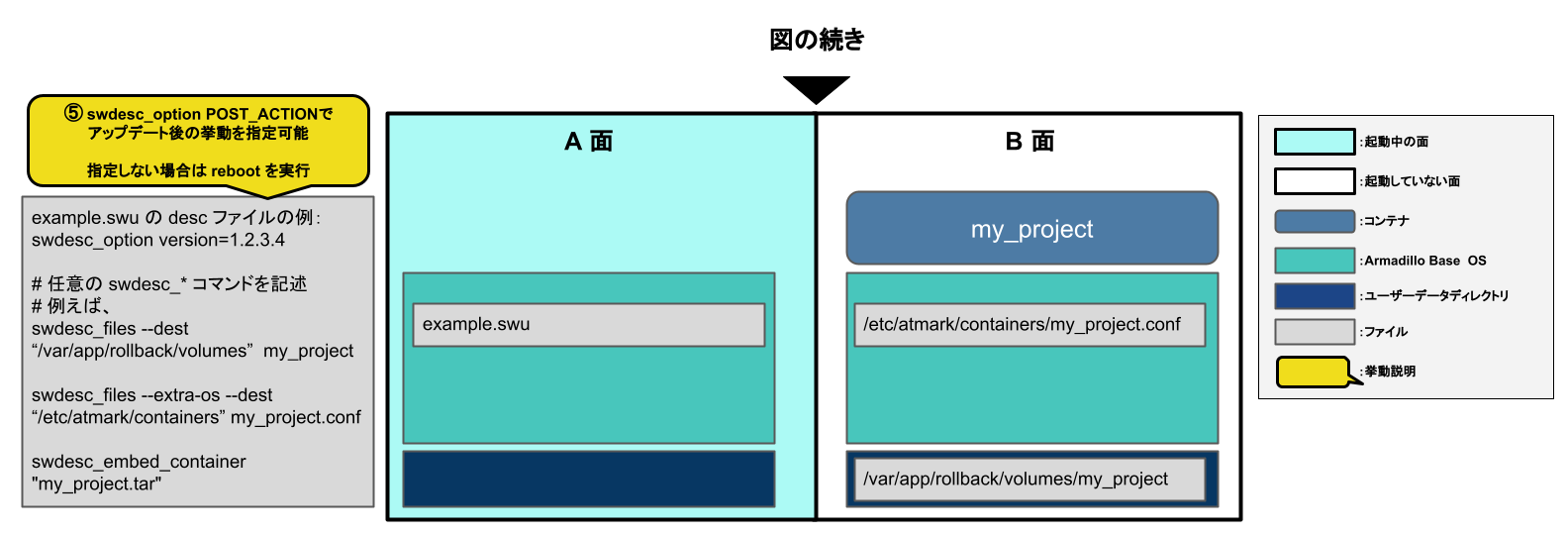
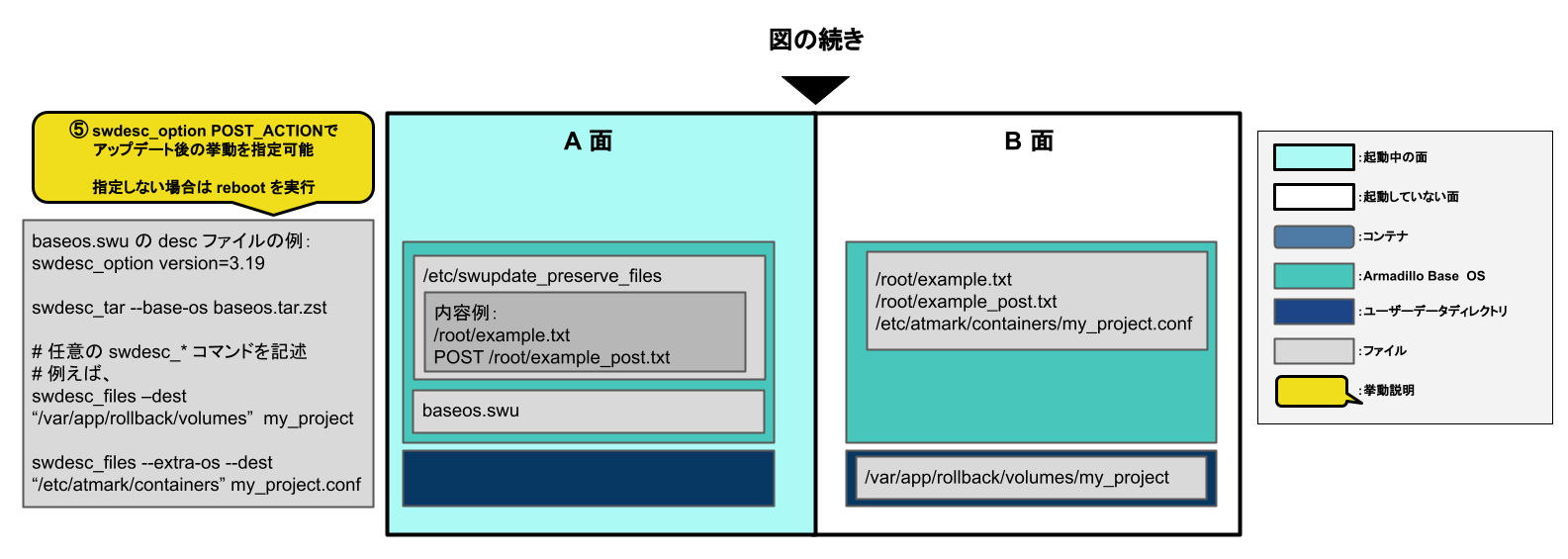
アップデート完了後の挙動
デフォルトではアップデート後に再起動( POST_ACTION=reboot )が行われます。
アップデート後の挙動を変更するには desc ファイルに swdesc_option POST_ACTION を追加してください。 swdesc_option POST_ACTION に指定できる挙動の種類を表6.8「アップデート完了後の挙動の種類」に示します。
表6.8 アップデート完了後の挙動の種類 | オプション名 | 説明 |
|---|
container | アップデート後にコンテナのみを再起動
(ただし、アップデート時に --extra_os オプションを指定したコマンドが実行された場合は reboot になる) | poweroff | アップデート後にシャットダウン | reboot | アップデートの後に再起動 | wait | アップデート後に再起動は行われず、次回起動時に B 面に切り替わる |
swdesc_option POST_ACTION の詳細は「SWUpdate 実行中/完了後の挙動を指定する」を参照してください。
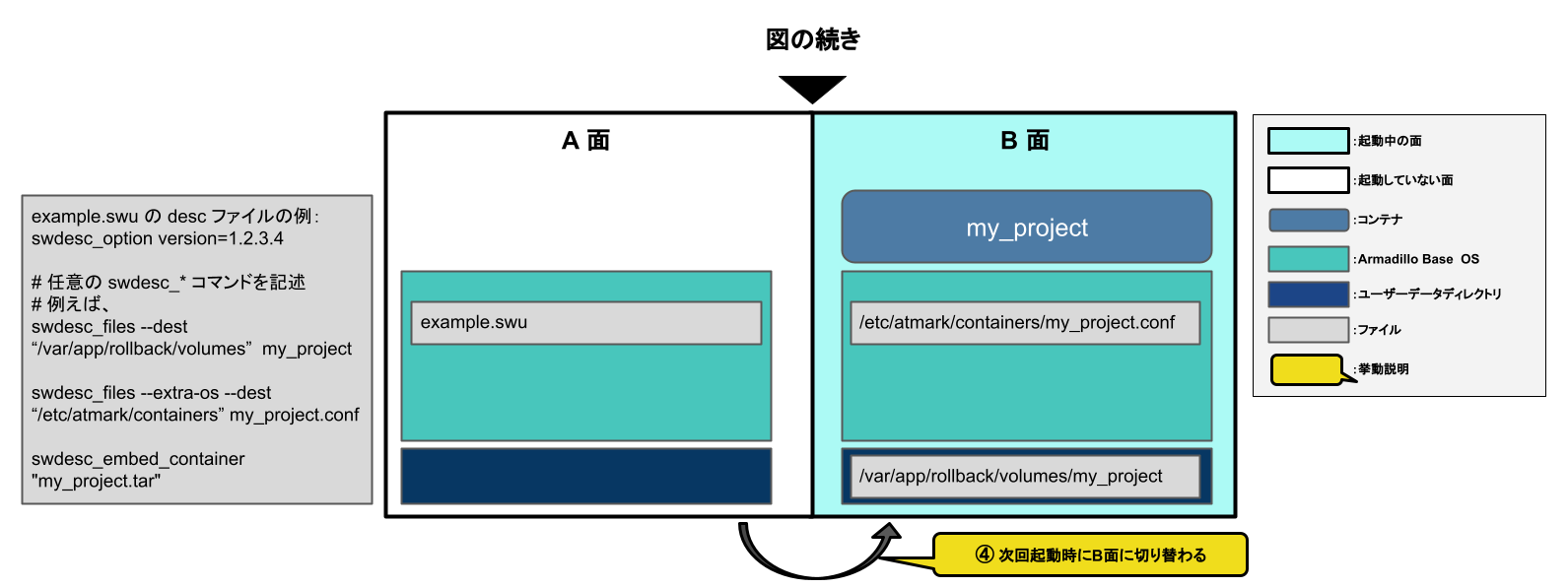
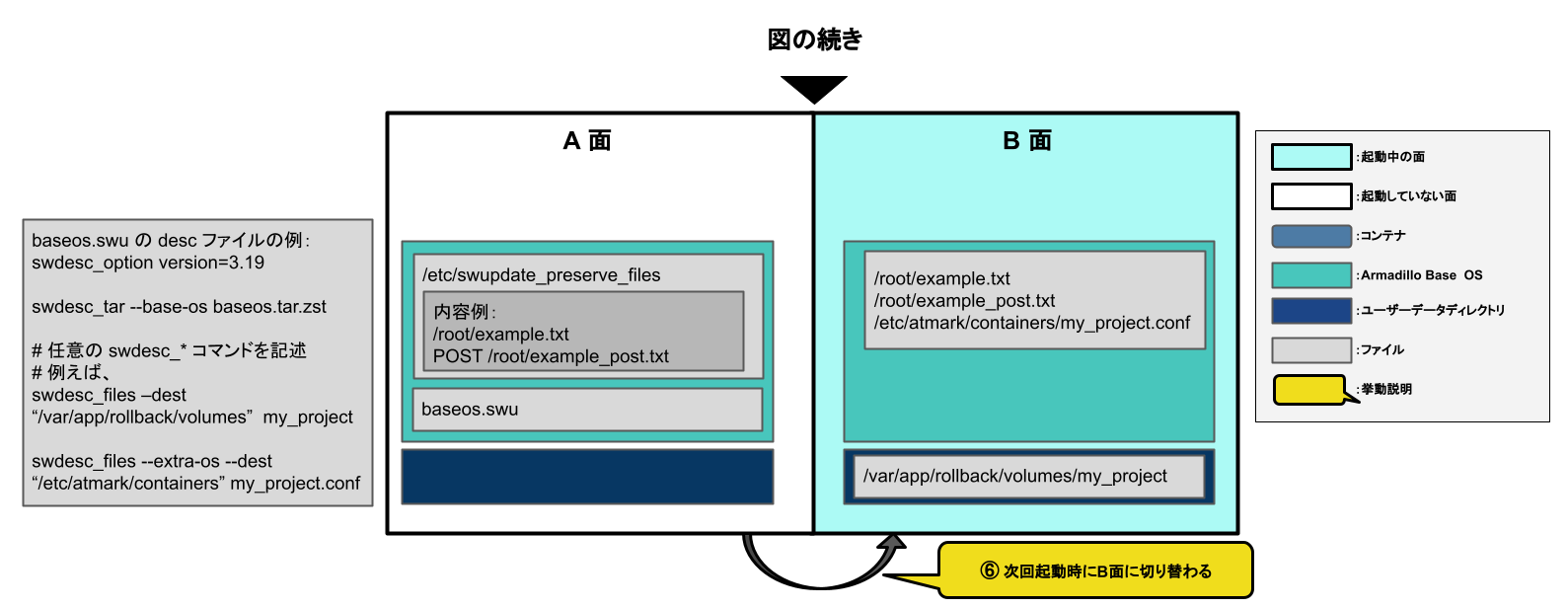
B 面への切り替え
図6.95「B 面への切り替え」に示すように、正常にアップデートが行われると、次回起動時に B 面に切り替わります。
desc ファイルの書き方の例
下記に SWUpdate を用いたアップデートの例を示します。
6.3.3. Armadillo Base OS の一括アップデートアップデートの流れを示します。 ここでは、boot して起動中の面を A 面、アップデート先の面を B 面とします。 swdesc_* コマンドには、swdesc_boot を指定してください。 swdesc_boot については「Armadillo のブートローダーを更新する」を参照してください。 ブートローダーのアップデートの流れは以下の通りです。
desc ファイルに swdesc_boot がある場合
SWU ファイルに含まれるブートローダーを B 面に書き込む
desc ファイルに swdesc_boot がない場合
A 面のブートローダーを B 面にコピーする
下記に SWUpdate を用いたアップデートの例を示します。 6.3.5. swupdate がエラーする場合の対処SWU イメージのインストール動作は、「SWU イメージとは」で述べたように swupdate が実行します。
mkswu で作成した SWU イメージの内容が適切でなかったり、あるいは、ストレージの空き容量が不足していたりするなど、いくつかの理由で swupdate のインストール動作が失敗することがあります。
インストールに失敗すると、swupdate は /var/log/messages にエラーメッセージのログを残しますので、エラーメッセージを見ると、エラーの内容・原因が分かります。 エラーの原因ごとに、エラーメッセージとエラーの内容および対処方法を記した FAQ ページ (https://armadillo.atmark-techno.com/faq/swupdate-troubleshooting-abos) を公開しています。
SWU イメージのインストールに失敗して対処法が分からないときは、この FAQ ページをご覧ください。 6.4. mkswu の .desc ファイルを編集するmkswu で SWU イメージを生成するためには、 desc ファイルを正しく作成する必要があります。
以下では、 desc ファイルの記法について紹介します。 swdesc_option component=<component>
swdesc_option version=<version>
か
swdesc_xxx --version <component> <version> [options]
<component>は以下のどれかにしてください (デフォルトでは .desc ファイルのファイル名を使います)
base_os: rootfs (Armadillo Base OS)を最初から書き込む時に使います。現在のファイルシステムは保存されないです。
この場合、/etc/swupdate_preserve_filesに載ってるファイルのみをコピーして新しいbase OSを展開します。 このcomponentがないと現在のrootfsのすべてがコピーされます。 swdesc_tar コマンドで rootfs (Armadillo Base OS) の tar アーカイブを展開する時に、--base-os オプションをつけることで component に base_os を指定したときと同じ動作となります。
extra_os.<文字列>: rootfsの変更を行う時に使います。<文字列> には任意の文字列を指定します。
rootfsを変更を行う時に使います。 swdesc_* コマンドに --extra-os オプションを追加すると、 component に自動的に extra_os. を足します。
<文字列> (コンテナの名前などの任意の文字列): rootfsの変更がないときに使います。
このcomponentを使うとrootfsの変更ができませんのでご注意ください。
アップデートを行う際にこのバージョンと現在のバージョンを比べてアップデートの判断を行います。
<component> がまだインストールされてなかった時や <version> が上がる時にインストールします。 デフォルトではダウングレードはできませんが、 --install-if=different オプションを追加することで <version> が変わる際にインストール可能になります。 アップデートの一部をインストールすることもありますので、複数の component で管理し、いくつかの古いバージョンに対応するアップデートも作成可能です。
バージョンの指定方法
swdesc_option version で指定可能なバージョンのフォーマットは以下の 2 種類があります。
x[.y[.z[-t]]]
x, y, z にはそれぞれ 0 ~ 2147483647 の整数を適用してください。
t には任意のアルファベットまたは 0 ~ 147483647 の整数を適用してください。 成功例は以下です: -
1
-
1.2.3
-
1.2.3-4
-
1.2.3-abc.4
-
1.2.3-a.b.c.4
失敗例は以下です:
2147483648
x には 0 ~ 2147483647 の整数を適用してください。
1.2.3-a.2147483648
t には 0 ~ 2147483647 の整数を適用してください。
1.2.3-abc123
t には 数字とアルファベットを混在しないでください。
1.2.3-abc.123 ならば可能です。
a.2.3
x にはアルファベットではなく 0 ~ 2147483647 の整数を適用してください。
1.1.1.1-a
x[.y[.z[-t]]]の形式で書いてください。
x.y.z.t
x, y, z, t にはそれぞれ 0 ~ 65535 の整数を適用してください。 成功例は以下です: -
1.2.3.4
-
65535.65535.65535.65535
-
65535.2.3.4
失敗例は以下です:
6.4.2. Armadillo へファイルを転送する
swdesc_tar と swdesc_files でファイルを転送します。
swdesc_tar [--dest <dest>] [--preserve-attributes] <tar_file>
swdesc_files [--dest <dest>] [--basedir <basedir>] [--preserve-attributes] \
<file> [<more files>]swdesc_tar の場合、予め用意されてあるtarアーカイブをこのままデバイスで展開します。
--dest <dest> で展開先を選ぶことができます。デフォルトは / (--extra-os を含め、バージョンの component は base_os か extra_os.* の場合)か /var/app/rollback/volumes/ (それ以外のcomponent)。
後者の場合は /var/app/volumes と /var/app/rollback/volumes 以外は書けないので必要な場合に --extra-os を使ってください。
--preserve-attributes を指定しない場合はファイルのオーナー、モード、タイムスタンプ等が保存されませんので、必要な場合は設定してください。バージョンが base_os の場合は自動的に設定されます。
swdesc_files の場合、mkswu がアーカイブを作ってくれますが同じ仕組みです。
--basedir <basedir> でアーカイブ内のパスをどこで切るかを決めます。
-
例えば、
swdesc_files --extra-os --basedir /dir /dir/subdir/file ではデバイスに /subdir/file を作成します。
-
デフォルトは <file> から設定されます。ディレクトリであればそのまま basedir として使います。それ以外であれば親ディレクトリを使います。
6.4.3. Armadillo 上で任意のコマンドを実行する
swdesc_command や swdesc_script でコマンドを実行します。
swdesc_command <command> [<more commands>]
swdesc_script <script> アップデート先の環境でコマンドやスクリプトファイルを実行します。 バージョンの component は base_os と extra_os 以外の場合、 /var/app/volumes と /var/app/rollback/volumes 以外は変更できないのでご注意ください。 コマンドの実行が失敗した場合、アップデートも失敗します。
6.4.4. Armadillo にファイルを転送し、そのファイルをコマンド内で使用する
swdesc_exec でファイルを配り、コマンド内でそのファイルを使用します。
swdesc_exec <file> <command> swdesc_command と同じくコマンドを実行しますが、<file> を先に転送してコマンド内で転送したファイル名を"$1"として使えます。
| |
|---|
本節で紹介する swdesc_command_nochroot、swdesc_script_nochroot、swdesc_exec_nochroot は基本的に使用することはありません。 swdesc_command、swdesc_script、swdesc_exec をご使用ください。
|
swdesc_command_nochroot, swdesc_script_nochroot, swdesc_exec_nochroot は アップデート先の環境ではなく動作中の環境でコマンドを実行します。
使い方は「Armadillo へファイルを転送する」と「Armadillo にファイルを転送し、そのファイルをコマンド内で使用する」に示した nochroot なしのバージョンと同じです。 アップデート先の環境は /target にマウントされるので、nochroot のコマンドを用いてアップデート先の環境に対してアクセスすることは可能です。 しかし、その方法によるアップデート先の環境に対するコマンドの実行は nochroot なしのコマンドでは実現できない特殊な場合にのみ行ってください。 | |
|---|
nochroot コマンドは確認を一切しないため、Armadillo が起動できない状態になる可能性もあります。充分にご注意ください。
例が必要な場合は /usr/share/mkswu/examples/firmware_update.desc を参考にしてください。 |
6.4.6. Armadillo にコンテナイメージを転送する
swdesc_embed_container, swdesc_usb_container, swdesc_pull_container で予め作成したコンテナを転送します。
swdesc_embed_container <container_archive>
swdesc_usb_container <container_archive>
swdesc_pull_container <container_url> 例は「リモートリポジトリにコンテナを送信する」、「イメージを SWUpdate で転送する」を参考にしてください。
6.4.7. Armadillo のブートローダーを更新するコマンドの他には、設定変数もあります。以下の設定は /home/atmark/mkswu/mkswu.conf に設定できます。 -
DESCRIPTION="<text>": イメージの説明、ログに残ります。
-
PRIVKEY=<path>, PUBKEY=<path>: 署名鍵と証明書
PRIVKEY_PASS=<val>: 鍵のパスワード(自動用)
openssl のPass Phraseをそのまま使いますので、pass:password, env:var や file:pathname のどれかを使えます。
pass や env の場合他のプロセスに見られる恐れがありますのでfileをおすすめします。
-
ENCRYPT_KEYFILE=<path>: 暗号化の鍵
6.4.9. Armadillo 上のコンテナイメージと自動起動用confファイルを削除する以下のオプションも mkswu.conf に設定できますが、.descファイルにも設定可能です。swdesc_option で指定することで、
誤った使い方をした場合 mkswu の段階でエラーを出力しますので、必要な場合は使用してください。 6.4.10. SWUpdate 実行中/完了後の挙動を指定する以下のオプションは Armadillo 上の /etc/atmark/baseos.conf に、例えば MKSWU_POST_ACTION=xxx として設定することができます。 その場合に swu に設定されなければ /etc の設定で実行されますので、
アットマークテクノが用意している Base OS のアップデートでも動作の変更は可能です。
swu に特定のオプションが設定された場合は設定されたオプションが優先されますので、一時的な変更も可能です。 -
swdesc_option POST_ACTION=container: コンテナのみのアップデート後に再起動を行いません。
コンテナの中身だけをアップデートする場合、Armadillo-IoT ゲートウェイ G4を再起動せずにコンテナだけを再起動させます。
-
swdesc_option POST_ACTION=poweroff: アップデート後にシャットダウンを行います。
-
swdesc_option POST_ACTION=wait: アップデート後に自動的に再起動は行われず、次回起動時にアップデートが適用されます。
-
swdesc_option POST_ACTION=reboot: デフォルトの状態に戻します。アップデートの後に再起動します。
swdesc_option NOTIFY_STARTING_CMD="command", swdesc_option NOTIFY_SUCCESS_CMD="command", swdesc_option NOTIFY_FAIL_CMD="command": アップデートをインストール中、成功した場合と失敗した場合に実行されるコマンドです。
コマンドを実行する事で、アプリケーションやユーザーにアップデートを知らせることができます。 LEDで知らせる例を /usr/share/mkswu/examples/enable_notify_led.desc に用意してあります。
/usr/share/mkswu/examples/enable_sshd.desc を参考にします。
descファイルを編集する必要がありませんが自分の公開鍵を指定された場所に配置してください。 [ATDE ~/mkswu]$ cp -r /usr/share/mkswu/examples/enable_sshd* .
[ATDE ~/mkswu]$ cat enable_sshd.desc
swdesc_option component=extra_os.sshd version=1
# add your public key in enable_sshd/root/.ssh/authorized_keys
if [ -z "$SWDESC_TEST" ]; then
grep -qE '^ssh-' enable_sshd/root/.ssh/authorized_keys \
|| error "Add your keys in enable_sshd/root/.ssh/authorized_keys"
fi
swdesc_files --dest /root enable_sshd/root
swdesc_command "ssh-keygen -A" \
"rc-update add sshd"
[ATDE ~/mkswu]$ cp ~/.ssh/id_rsa.pub \
enable_sshd/root/.ssh/authorized_keys
[ATDE ~/mkswu]$ mkswu enable_sshd.desc
Enter pass phrase for /home/atmark/mkswu/swupdate.key:
enable_sshd.swu を作成しました。 |
自分の公開鍵を転送します。デフォルトのオプションなので enable_sshd/root ディレクトリの中身をこのまま /root に転送されます。
| |
再起動する度に新しいサーバーの鍵が変わらないように、アップデートの時に一回作成します。
| |
サービスを有効にします。
| |
自分の公開鍵を指定された場所に配置します。
| |
イメージを作成します。パスワードは証明鍵のパスワードです。
|
6.4.11.2. 例: Armadillo Base OSアップデートここでは、「Armadilloのソフトウェアをビルドする」でメインシステム向けのビルドで作成したファイルを使用します。 /usr/share/mkswu/examples/OS_update.desc を参考にします。
[ATDE ~/mkswu]$ cp /usr/share/mkswu/examples/OS_update.desc update-[VERSION].desc
[ATDE ~/mkswu]$ vi update-[VERSION].desc
# uboot image can be generated with atmark imx-boot script
swdesc_uboot imx-boot_armadillo_x2
# base OS is a tar that will be extracted on a blank filesystem,
# after copying just a few key config files.
#
# OS updates are only installed if version is greater than previous update
# so if you install your own updates atmark-techno provided Armadillo Base OS
# updates might not get installed
swdesc_tar "baseos-x2-[VERSION].tar.zst" \
--version base_os [VERSION]
[ATDE ~/mkswu]$ mkswu update-[VERSION].desc
Enter pass phrase for /home/atmark/mkswu/swupdate.key:
update-[VERSION].swu を作成しました。 |
imx-bootでビルドしたイメージを使います。
| |
build-rootfsでビルドしたイメージを使います。
| |
バージョンが上がるときにしかインストールされませんので、現在の/etc/sw-versionsを確認して適切に設定してください。
| |
イメージを作成します。パスワードは証明鍵の時のパスワードです。
|
6.4.11.3. 例: swupdate_preserve_files で Linux カーネル以外の Armadillo-IoT ゲートウェイ G4 向けのイメージをインストールする方法Armadillo-IoT ゲートウェイ G4 向けのアップデートイメージに Linux カーネルが含まれています。 swupdate_preserve_files を使って、以下のコマンドでインストール後に現在のカーネルをコピーして更新させないようにします。
[armadillo ~]# echo 'POST /boot' >> /etc/swupdate_preserve_files
[armadillo ~]# echo 'POST /lib/modules' >> /etc/swupdate_preserve_files
[armadillo ~]# persist_file /etc/swupdate_preserve_files |
swupdate_preserve_files に /boot と /lib/modules を保存するように追加します。
| |
変更した設定ファイルを保存します
|
| |
|---|
/usr/share/mkswu/examples/kernel_update*.desc のように update_preserve_files.sh のヘルパーで、パスを自動的に /etc/swupdate_preserve_files に追加することができます。
[ATDE ~/mkswu]$ cat example.desc
swdesc_script "$SCRIPT_DIR/examples/update_preserve_files.sh" -- \
"POST /boot" \
"POST /lib/modules" |
スクリプトの内容確認する場合は /usr/share/mkswu/examples/update_preserve_files.sh を参照してください。
|
|
| |
|---|
Armadillo Base OS のカーネルを再び使用したい場合は同じスクリプトの --del オプションで行を削除することができます。 [ATDE ~/mkswu]$ cat example.desc
swdesc_script "$SCRIPT_DIR/examples/update_preserve_files.sh" -- \
--del "POST /boot" "POST /lib/modules" |
6.5. swupdate_preserve_files についてextra_os のアップデートで rootfs にファイルを配置することができますが、次の OS アップデートの際に削除される可能性があります。
デフォルトでは、 /etc/atmark と、 swupdate 、 sshd やネットワークの設定を保存しますがそれ以外はコピーされてません。 そうでないファイルを更新する際には /etc/swupdate_preserve_files に記載します。「例: swupdate_preserve_files で Linux カーネル以外の Armadillo-IoT ゲートウェイ G4 向けのイメージをインストールする方法」 を参考にしてください。 コピーのタイミングによって、以下のどれかを使用してください:
単にファイルを記載する
この場合、アップデートする前にファイルをコピーします。 baseos のイメージと同じ swu にアップデートしたいファイルを記載していても、
このファイルが Armadillo Base OS に含まれないのであれば問題なくアップデートできます。 例: echo "/root/.profile" >> /etc/swupdate_preserve_files
POST のキーワードの後に記載する
この場合、アップデートの最後でコピーします。 Armadillo Base OS に含まれてるファイルであれば、インストール前にコピーしても保存されないのでコピーのタイミングをずらします。 そのコピーが最後に行われるので、同じアップデートでファイルの変更ができません。アップデートを別けて、 baseos のイメージをインストールしてからこのファイルを更新することができます。 例: echo "POST /etc/conf.d/podman-atmark" >> /etc/swupdate_preserve_files
mkswu --show [file.swu] で SWU イメージの内容を確認することができます。
出力は desc ファイルに似ていますが、そのまま desc ファイルとして利用できませんので確認用としてお使いください。 [ATDE ~/mkswu]$ mkswu --show enable_sshd.swu
enable_sshd.swu
# built with mkswu 4.1
swdesc_files --dest /root enable_sshd/root
--version extra_os.sshd 1
(encrypted)
swdesc_command ssh-keygen -A && rc-update add sshd default
--version extra_os.sshd 1 mkswu --init の時に暗号化を有効にする場合は AES でファイルを暗号化します。
現在使われてる SWUpdate の暗号化はコマンドやメタデータを含む sw-description ファイルは暗号化されてません。
そのため、通信の暗号化(HTTPSで送信するなど)を使うことを推奨します。 6.8. Web UI から Armadillo をセットアップする (ABOS Web)ABOS Web は、Web ブラウザから Armadillo の動作設定を行う機能で、ABOS (Armadillo Base OS) を搭載する全ての Armadillo に対応しています。 詳細は、「ABOS Web とは」を参照してください。 ABOS Web は、ABOS の詳細や Linux のコマンドシェルの操作に詳しくない方でも、簡単に Armadillo のセットアップを行なえることを目的にしています。
そのための、Armadillo の動作設定を行う機能ですから、動作設定以外のこと、たとえば、Armadillo の動作状態を監視したりすることは、できません。
さらに、Armadillo をインターネットから設定操作する、リモート操作もできません。
セキュリティの観点から、ABOS Web は、同じ LAN 内からの接続しか受け付けないように実装しています。 ABOS Web でできる Armadillo の設定については、「ABOS Web の設定機能一覧と設定手順」を参照してください。
なお、ABOS Web は OSS で提供していますので、現在の ABOS Web に無い設定機能を、ご自分で実装して機能追加することも可能です。 6.8.2. ABOS Web の設定機能一覧と設定手順現在、ネットワークに関して ABOS Web で設定できるのは以下のものです。 -
WWAN設定
-
WLAN設定
-
各接続設定(各ネットワークインターフェースの設定)
-
DHCPサーバー設定
-
NAT設定
-
VPN設定
これらについては、「ネットワーク設定」で紹介していますので、そちらを参照してください。 ネットワーク以外にも ABOS Web は以下の機能を持っています。 -
コンテナ管理
-
SWUインストール
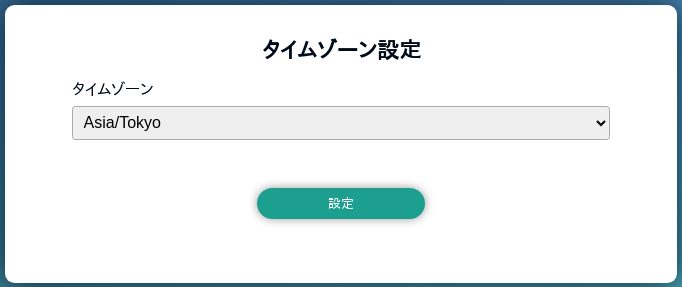
-
時刻設定
-
アプリケーション向けのインターフェース (Rest API)
-
カスタマイズ
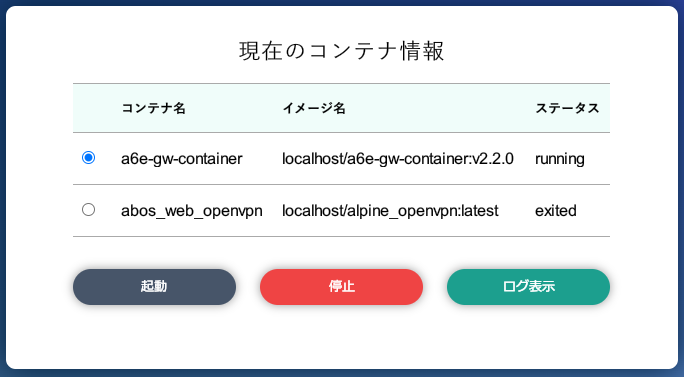
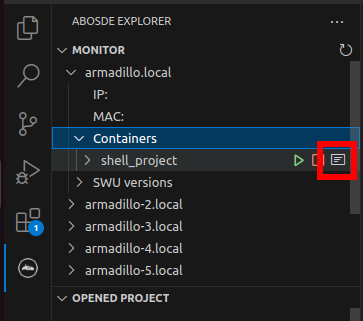
本章では、これらのネットワーク以外の設定項目について紹介します。 ABOS Web から Armadillo 上のコンテナを一覧表示して、コンテナごとに起動・停止を行うことができます。 ABOS Web のトップページから、"コンテナ管理"をクリックすると、図6.100「コンテナ管理」の画面に遷移します。 この画面では、ABOS 上にあるコンテナ全てについて、イメージ名やコンテナ名、現在状態を一覧表示します。
コンテナの一覧表示欄で選択したコンテナに対し、起動と停止、および、コンテナから出力されたログの表示を行うことができます。 | |
|---|
「VPN設定」に記載のとおり、VPN 接続を設定すると、abos_web_openvpn のコンテナが作成されます。
VPN 接続中は、このコンテナが動作状態になっており、このコンテナをコンテナ管理画面で停止すると、VPN 接続が切断されます。 |
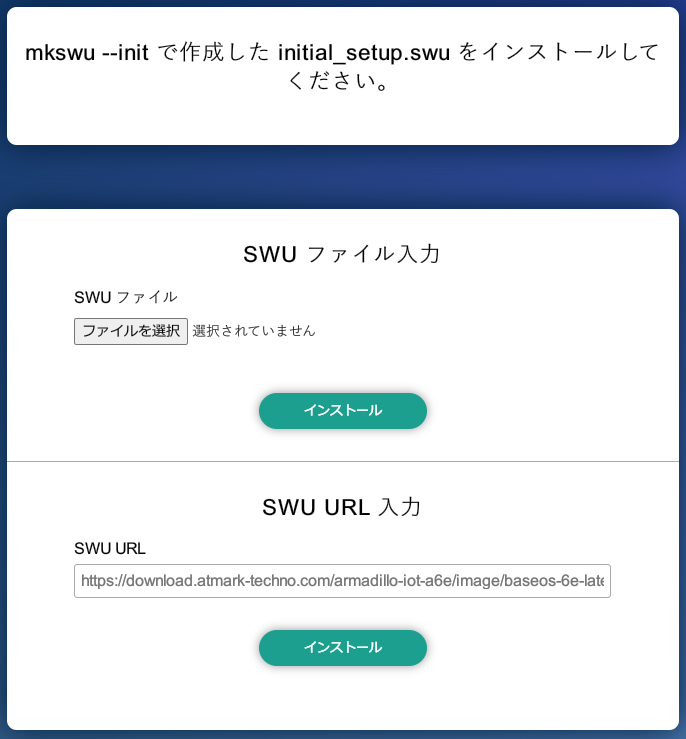
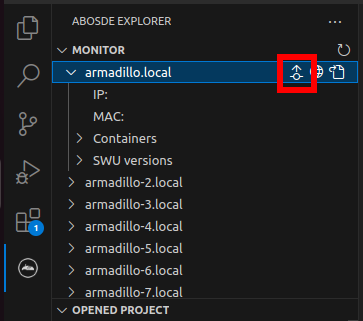
ABOS Web から PC 上の SWU イメージや HTTP サーバー上の SWU イメージを Armadillo にインストールすることができます。 SWU イメージについては、「SWU イメージとは」を参照してください。 ABOS Web のトップページから、"SWU インストール"をクリックすると、図6.101「SWU インストール」の画面に遷移します。 この画面では、PC 上の SWU イメージファイルまたは、HTTP サーバー上の SWU イメージファイルの URL を指定して、Armadillo にインストールすることができます。
Armadillo のソフトウェアのアップデート用に最初に行う設定で作成する initial_setup.swu が、まだ Armadillo にインストールされていなければ、"mkswu --init で作成した initial_setup.swu をインストールしてください。" というメッセージを画面上部に表示します。 SWU イメージのインストール動作を実行する時には、進行状況を示すログを表示します。
"現在の SWU で管理されているバージョン" 欄には、ABOS の各ソフトウェアコンポーネントの名前とバージョン情報を一覧表示します。 6.8.6. アプリケーション向けのインターフェース (Rest API)コンテナやスクリプトから ABOS Web の一部の機能を使用できます。 6.8.6.1. Rest API へのアクセス権の管理Rest API は ABOS Web のパスワードと Rest API 用のトークンで認証されます。 また、接続可能なネットワークにも制限をかけております。初期状態では、同一サブネットからのアクセスのみ許容しています。
同一サブネット外の IP アドレスからアクセスしたい場合は設定が必要です。
設定方法は 「ABOS Web へのアクセス」 を参照してください。 各リクエストは以下のどちらかの Authorization ヘッダーで認証されます: -
Basic (パスワード認証): curl の -u :<password> 等で認証可能です。<password> の文字列は ABOS Web で設定したパスワードです。
-
Bearer (トークン認証): curl の -H "Authorization: Bearer <token> 等で認証可能です。<token> は /api/tokens であらかじめ生成した文字列です。
また、トークンには権限も設定できます。Admin で生成されたトークンはすべてのインターフェースにアクセスできますが、
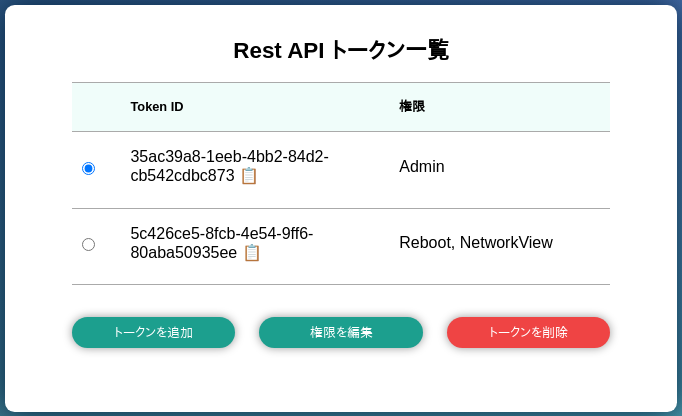
一部のインターフェースしか使用しない場合はそのインターフェースに必要な権限だけを持つトークンを生成してください。 トークンの管理は ABOS Web の「設定管理」ページで行えます: | |
|---|
ABOS Web の バージョン 1.2.3 以降では、Token ID の横にあるクリップボードアイコンをクリックするとクリップボードにコピーすることができます。 |
6.8.6.2. Rest API 使用例の前提条件各 Rest API の使用例を説明します。使用例では以下を前提としています。: -
ABOS Web に
https://armadillo.local:58080 でアクセスします。
-
「
AUTH 」環境変数に ABOS Web で生成したトークンを設定します。
例: AUTH="Authorization: Bearer 35ac39a8-1eeb-4bb2-84d2-cb542cdbc873"
-
curl コマンドを省略するため、以下のように alias を使用します:
[ATDE ~]$ alias curl_rest='curl -k -H "$AUTH" -w "\nhttp code: %{http_code}\n" ' | |
|---|
コンテナから ABOS Web には「https://host.containers.internal:58080」でアクセスできます。 |
| |
|---|
この章で説明する例では、curl のオプションに -k を指定して証明書を無視するようにしています。
もし、証明書を使用したい場合は以下のように設定してください。 [ATDE ~]$ openssl s_client -showcerts -connect armadillo.local:58080 </dev/null 2>/dev/null | openssl x509 -outform PEM > abosweb.pem
[ATDE ~]$ CERT="$PWD/abosweb.pem"
[ATDE ~]$ alias curl_rest='curl -H "$AUTH" --cacert "$CERT" -w "\nhttp code: %{http_code}\n" ' |
インターフェースの一部にはパラメータを取るものがあります。パラメータがある場合は json (Content-Type を application/json に設定する)と
form(デフォルトの application/x-www-form-urlencoded でのパラメータ)のどちらでも使用可能です。 インターフェースの出力がある場合は json object で出力されます。
今後のバージョンアップで json object のキーが増える可能性があるため、
出力された値を処理する場合はその点に留意してください。 エラーの場合は json object の「error」キーに文字列のエラーが記載されています。
http のステータスコードも 50x になります。 エラーの例: [ATDE ~]$ curl_rest -X DELETE https://armadillo.local:58080/api/tokens/3b2d830d-2f64-4e76-9e59-316da82eefc4
{"error":"No such token"}
http code: 5006.8.6.4. Rest API : トークン管理トークン管理のためのインターフェースは以下のとおりです:
トークン一覧
GET "/api/tokens"
必要権限: Admin
パラメータ: 無し
出力: トークンリスト
[ATDE ~]$ curl_rest https://armadillo.local:58080/api/tokens
{"tokens":[{"token":"35ac39a8-1eeb-4bb2-84d2-cb542cdbc873","permissions":["Admin"]},{"token":"5c426ce5-8fcb-4e54-9ff6-80aba50935ee","permissions":["Reboot","NetworkView"]}]}
http code: 200
トークン取得
GET "/api/tokens/<token>"
必要権限: Admin
パラメータ: 無し
出力: トークン情報
[ATDE ~]$ curl_rest https://armadillo.local:58080/api/tokens/35ac39a8-1eeb-4bb2-84d2-cb542cdbc873
{"token":"35ac39a8-1eeb-4bb2-84d2-cb542cdbc873","permissions":["Admin"]}
http code: 200
トークン生成
POST "/api/tokens"
必要権限: Admin
パラメータ: 付与したい permissions 権限リスト(ない場合は「Admin」で生成されます)
出力: 生成されたトークン情報
[ATDE ~]$ curl_rest -H "Content-type: application/json" -d '{"permissions": ["SwuInstall", "ContainerView"]}' https://armadillo.local:58080/api/tokens
{"token":"3b2d830d-2f64-4e76-9e59-316da82eefc4","permissions":["SwuInstall","ContainerView"]}
http code: 200
トークン編集 (存在しない場合は指定のトークンで生成されます)
POST "/api/tokens/{token_id}"
必要権限: Admin
パラメータ: 付与したい permissions 権限リスト(ない場合は編集しません)
出力: 編集か生成されたトークン情報
[ATDE ~]$ curl_rest -X POST -d permissions=Poweroff -d permissions=ContainerAdmin https://armadillo.local:58080/api/tokens/3b2d830d-2f64-4e76-9e59-316da82eefc4
{"token":"3b2d830d-2f64-4e76-9e59-316da82eefc4","permissions":["Poweroff","ContainerAdmin"]}
トークン削除
DELETE "/api/tokens/{token_id}"
必要権限: Admin
パラメータ: 無し
出力: 無し
[ATDE ~]$ curl_rest -X DELETE https://armadillo.local:58080/api/tokens/3b2d830d-2f64-4e76-9e59-316da82eefc4
http code: 200
abos-web パスワード変更
POST "/api/password"
必要権限: Admin
パラメータ: password でハッシュ済みのパスワード文字列か hashed=false が設定されている場合は平文の文字列
出力: 無し
[ATDE ~]$ PWD_HASH=$(openssl passwd -6)
Password:
Verifying - Password:
[ATDE ~]$ echo $PWD_HASH
$6$LuXQduN7L3PwbMaZ$txrw8vLJqEVUreQnZhM0CYMQ5U5B9b58L0mpVRULDiVCh2O46GKscq/xsDPskjxg.x8ym0ri1/8NqFBu..IZE0
[ATDE ~]$ curl_rest --data-urlencode "password=$PWD_HASH" -X POST https://armadillo.local:58080/api/password
http code: 200
インストール済み SWU のバージョン情報取得
GET "/api/swu/versions"
必要権限: SwuView
パラメータ: 無し
出力: Swupdate の各バージョン情報
[ATDE ~]$ curl_rest https://armadillo.local:58080/api/swu/versions
{"extra_os.custom":"54","extra_os.container":"1","custom":"54","extra_os.initial_setup":"4","boot":"2020.4-at19","base_os":"3.18.4-at.6","extra_os.sshd":"1"}
http code: 200-
アップデートステータス取得
GET "/api/swu/status"
必要権限: SwuView
パラメータ: 無し
出力: rollback_ok: ロールバック状態 (false の場合は rollback されています)、last_update_timestamp: UTC の unix epoch (数字での日付)、
last_update_versions: 最新のアップデートで更新されたバージョン情報 (コンポーネント → [更新前のバージョン, 更新後のバージョン]。
更新前に存在しなかったコンポーネントの場合は null で記載されています)
[ATDE ~]$ curl_rest https://armadillo.local:58080/api/swu/status
{"rollback_ok":true,"last_update_timestamp":1703208559,"last_update_versions":{"custom":[null,"54"],"extra_os.custom":["53","54"]}}
http code: 200
SWU をファイルアップロードでインストール
POST "/api/swu/install/upload"
必要権限: SwuInstall
パラメータ: multipart/form-data で swu の転送
出力: swupdate プロセスの出力 (stdout または stderr)、またはアップデートプロセスの出力ステータス (exit_code または exit_signal)
[ATDE ~]$ curl_rest -F swu=@"$HOME/mkswu/file.swu" https://armadillo.local:58080/api/swu/install/upload
{"stdout":"SWUpdate v2023.05_git20231025-r0\n"}
{"stdout":"\n"}
{"stdout":"Licensed under GPLv2. See source distribution for detailed copyright notices.\n"}
{"stdout":"\n"}
{"stdout":"[INFO ] : SWUPDATE running : [main] : Running on AGX4500 Revision at1\n"}
{"stdout":"[INFO ] : SWUPDATE started : Software Update started !\n"}
{"stdout":"[INFO ] : SWUPDATE running : [install_single_image] : Installing pre_script\n"}
{"stdout":"[INFO ] : SWUPDATE running : [read_lines_notify] : No base os update: copying current os over\n"}
: (省略)
{"stdout":"[INFO ] : SWUPDATE running : [install_single_image] : Installing post_script\n"}
{"stdout":"[INFO ] : SWUPDATE running : [read_lines_notify] : Removing unused containers\n"}
{"stdout":"[INFO ] : SWUPDATE running : [read_lines_notify] : swupdate triggering reboot!\n"}
{"stderr":"Killed\n"}
{"exit_code":0}
http code: 200
SWU を URL でインストール
POST "/api/swu/install/url"
必要権限: SwuInstall
パラメータ: url=<SWU をダウンロードできる URL>
出力: swupdate プロセスの出力 (stdout または stderr)、またはアップデートプロセスの出力ステータス (exit_code または exit_signal)
[ATDE ~]$ curl_rest -d url=https://url/to/file.swu https://armadillo.local:58080/api/swu/install/url
{"stdout":"Downloading https://url/to/file.swu...\n"}
{"stdout":"SWUpdate v2023.05_git20231025-r0\n"}
{"stdout":"\n"}
{"stdout":"Licensed under GPLv2. See source distribution for detailed copyright notices.\n"}
{"stdout":"\n"}
{"stdout":"[INFO ] : SWUPDATE running : [main] : Running on AGX4500 Revision at1\n"}
{"stdout":"[INFO ] : SWUPDATE started : Software Update started !\n"}
{"stdout":"[INFO ] : SWUPDATE running : [install_single_image] : Installing pre_script\n"}
{"stdout":"[INFO ] : SWUPDATE running : [read_lines_notify] : No base os update: copying current os over\n"}
: (省略)
{"stdout":"[INFO ] : SWUPDATE running : [install_single_image] : Installing post_script\n"}
{"stdout":"[INFO ] : SWUPDATE running : [read_lines_notify] : Removing unused containers\n"}
{"stdout":"[INFO ] : SWUPDATE running : [read_lines_notify] : swupdate triggering reboot!\n"}
{"stderr":"Killed\n"}
{"exit_code":0}
http code: 200
6.8.6.6. Rest API : コンテナ操作
コンテナ一覧
GET "/api/containers"
必要権限: ContainerView
パラメータ: 無し
出力: 各コンテナの id, name, state, command, image 情報
[ATDE ~]$ curl_rest https://armadillo.local:58080/api/containers
{"containers":[{"id":"02616122dcea5bd75c551b29b2ef54f54e09f59c50ce3282684773bc6bfb86a8","name":"python_app","state":"running","command":["python3","/vol_app/src/main.py"],"image":"localhost/python_arm64_app_image:latest"}]}
http code: 200
コンテナログ取得
GET "/api/containers/{container}/logs"
必要権限: ContainerView
パラメータ: follow=true (podman logs -f と同様の効果)
出力: podman logs プロセスの出力 (stdout または stderr)、またはアップデートプロセスの出力ステータス (exit_code または exit_signal)
[ATDE ~]$ curl_rest https://armadillo.local:58080/api/containers/python_app/logs
{"stdout":"Some message\n"}
{"exit_code":0}
http code: 200follow=true を付与する例 [ATDE ~]$ curl_rest https://armadillo.local:58080/api/containers/python_app/logs?follow=true
{"stdout":"Some message\n"}
Ctrl-C で終了
コンテナ起動
POST "/api/containers/{container}/start"
必要権限: ContainerAdmin
パラメータ: 無し
出力: 無し
[ATDE ~]$ curl_rest -X POST https://armadillo.local:58080/api/containers/python_app/start
http code: 200
コンテナ停止
POST "/api/containers/{container}/stop"
必要権限: ContainerAdmin
パラメータ: 無し
出力: 無し
[ATDE ~]$ curl_rest -X POST https://armadillo.local:58080/api/containers/python_app/stop
http code: 200
6.8.6.7. Rest API : ネットワーク設定
ネットワーク設定一覧
GET "/api/connections"
必要権限: NetworkView
パラメータ: 無し
出力: ネットワーク設定一覧と各接続の uuid, name, state, ctype, 存在すれば device 情報
[ATDE ~]$ curl_rest https://armadillo.local:58080/api/connections
{"connections":[{"name":"Wired connection 1","state":"activated","uuid":"18d241f1-946c-3325-974f-65cda3e6eea5","ctype":"802-3-ethernet","device":"eth0"},{"name":"lo","state":"activated","uuid":"529ec241-f122-4cb2-843f-ec9787b2aee7","ctype":"loopback","device":"lo"},{"name":"podman0","state":"activated","uuid":"be4583bc-3498-4df2-a31c-773d781433aa","ctype":"bridge","device":"podman0"},{"name":"veth0","state":"activated","uuid":"03446b77-b1ab-47d0-98fc-f167c3f3778a","ctype":"802-3-ethernet","device":"veth0"},{"name":"Wired connection 2","state":"","uuid":"181f44df-850e-36c1-a5a4-6e461c768acb","ctype":"802-3-ethernet"},{"name":"Wired connection 3","state":"","uuid":"e4381368-6351-3985-ba6e-2625c62b8d39","ctype":"802-3-ethernet"}]}
http code: 200
ネットワーク設定詳細取得
GET "/api/connections/{connection}"
必要権限: NetworkView
パラメータ: 無し(URL の connection は UUID または接続名で使用可能)
出力: 接続の詳細情報(Network Manager のプロパティ)
[ATDE ~]$ curl_rest https://armadillo.local:58080/api/connections/Wired%20connection%201
{"name":"Wired connection 1","state":"activated","uuid":"18d241f1-946c-3325-974f-65cda3e6eea5","ctype":"802-3-ethernet","device":"eth0","props":{"802-3-ethernet.accept-all-mac-addresses":"-1","802-3-ethernet.auto-negotiate":"no","802-3-ethernet.cloned-mac-address":"","802-3-ethernet.duplex":"","802-3-ethernet.generate-mac-address-mask":"","802-3-ethernet.mac-address":"","802-3-ethernet.mac-address-blacklist":"","802-3-ethernet.mtu":"auto","802-3-ethernet.port":"","802-3-ethernet.s390-nettype":"","802-3-ethernet.s390-options":"","802-3-ethernet.s390-subchannels":"","802-3-ethernet.speed":"0","802-3-ethernet.wake-on-lan":"default","802-3-ethernet.wake-on-lan-password":"","GENERAL.CON-PATH":"/org/freedesktop/NetworkManager/Settings/1","GENERAL.DBUS-PATH":"/org/freedesktop/NetworkManager/ActiveConnection/6","GENERAL.DEFAULT":"yes","GENERAL.DEFAULT6":"no","GENERAL.DEVICES":"eth0","GENERAL.IP-IFACE":"eth0","GENERAL.MASTER-PATH":"","GENERAL.NAME":"Wired connection 1","GENERAL.SPEC-OBJECT":"","GENERAL.STATE":"activated","GENERAL.UUID":"18d241f1-946c-3325-974f-65cda3e6eea5","GENERAL.VPN":"no","GENERAL.ZONE":"","IP4.ADDRESS[1]":"198.51.100.123/16","IP4.DNS[1]":"192.0.2.1","IP4.DNS[2]":"192.0.2.2","IP4.GATEWAY":"198.51.100.1","IP4.ROUTE[1]":"dst = 198.51.100.0/16, nh = 0.0.0.0, mt = 100","IP4.ROUTE[2]":"dst = 0.0.0.0/0, nh = 198.51.100.1, mt = 100","IP6.ADDRESS[1]":"fe80::211:cff:fe00:b13/64","IP6.GATEWAY":"","IP6.ROUTE[1]":"dst = fe80::/64, nh = ::, mt = 1024","connection.auth-retries":"-1","connection.autoconnect":"yes","connection.autoconnect-priority":"-999","connection.autoconnect-retries":"-1","connection.autoconnect-slaves":"-1","connection.dns-over-tls":"-1","connection.gateway-ping-timeout":"0","connection.id":"Wired connection 1","connection.interface-name":"eth0","connection.lldp":"default","connection.llmnr":"-1","connection.master":"","connection.mdns":"-1","connection.metered":"unknown","connection.mptcp-flags":"0x0","connection.multi-connect":"0","connection.permissions":"","connection.read-only":"no","connection.secondaries":"","connection.slave-type":"","connection.stable-id":"","connection.timestamp":"1703208824","connection.type":"802-3-ethernet","connection.uuid":"18d241f1-946c-3325-974f-65cda3e6eea5","connection.wait-activation-delay":"-1","connection.wait-device-timeout":"-1","connection.zone":"","ipv4.addresses":"198.51.100.123/16","ipv4.auto-route-ext-gw":"-1","ipv4.dad-timeout":"-1","ipv4.dhcp-client-id":"","ipv4.dhcp-fqdn":"","ipv4.dhcp-hostname":"","ipv4.dhcp-hostname-flags":"0x0","ipv4.dhcp-iaid":"","ipv4.dhcp-reject-servers":"","ipv4.dhcp-send-hostname":"yes","ipv4.dhcp-timeout":"0","ipv4.dhcp-vendor-class-identifier":"","ipv4.dns":"192.0.2.1,192.0.2.2","ipv4.dns-options":"","ipv4.dns-priority":"0","ipv4.dns-search":"","ipv4.gateway":"198.51.100.1","ipv4.ignore-auto-dns":"no","ipv4.ignore-auto-routes":"no","ipv4.link-local":"0","ipv4.may-fail":"yes","ipv4.method":"manual","ipv4.never-default":"no","ipv4.replace-local-rule":"-1","ipv4.required-timeout":"-1","ipv4.route-metric":"-1","ipv4.route-table":"0","ipv4.routes":"","ipv4.routing-rules":"","ipv6.addr-gen-mode":"eui64","ipv6.addresses":"","ipv6.auto-route-ext-gw":"-1","ipv6.dhcp-duid":"","ipv6.dhcp-hostname":"","ipv6.dhcp-hostname-flags":"0x0","ipv6.dhcp-iaid":"","ipv6.dhcp-send-hostname":"yes","ipv6.dhcp-timeout":"0","ipv6.dns":"","ipv6.dns-options":"","ipv6.dns-priority":"0","ipv6.dns-search":"","ipv6.gateway":"","ipv6.ignore-auto-dns":"no","ipv6.ignore-auto-routes":"no","ipv6.ip6-privacy":"-1","ipv6.may-fail":"yes","ipv6.method":"auto","ipv6.mtu":"auto","ipv6.never-default":"no","ipv6.ra-timeout":"0","ipv6.replace-local-rule":"-1","ipv6.required-timeout":"-1","ipv6.route-metric":"-1","ipv6.route-table":"0","ipv6.routes":"","ipv6.routing-rules":"","ipv6.token":"","proxy.browser-only":"no","proxy.method":"none","proxy.pac-script":"","proxy.pac-url":""}}
http code: 200
ネットワーク設定の変更
PATCH "/api/connections/{connection}"
必要権限: NetworkAdmin
パラメータ: Network Manager で編集可能な値
出力: 無し
[ATDE ~]$ curl_rest -X PATCH -d ipv4.method=manual -d ipv4.addresses=198.51.100.123/16 https://armadillo.local:58080/api/connections/Wired%20connection%201
http code: 200
ネットワークの接続
POST "/api/connections/{connection}/up"
必要権限: NetworkAdmin
パラメータ: 無し
出力: 無し
[ATDE ~]$ curl_rest -X POST https://armadillo.local:58080/api/connections/Wired%20connection%201/up
http code: 200
ネットワークの切断
POST "/api/connections/{connection}/down"
必要権限: NetworkAdmin
パラメータ: 無し
出力: 無し
[ATDE ~]$ curl_rest -X POST https://armadillo.local:58080/api/connections/Wired%20connection%201/down
http code: 200 | |
|---|
「3G/LTE再接続サービス」が動作している状態で LTE を切断した場合、LTE 再接続サービスにより再度接続を試み、接続可能であれば接続状態へ戻ります。 |
ネットワーク設定の削除
DELETE "/api/connections/{connection}"
必要権限: NetworkAdmin
パラメータ: 無し
出力: 無し
[ATDE ~]$ curl_rest -X DELETE https://armadillo.local:58080/api/connections/178b8c95-fcad-4bb1-8040-5a02b9ad046f
http code: 200 | |
|---|
通信に使用しているネットワークの設定を削除した場合は Armadillo へアクセスできなくなりますので、ご注意ください。 |
無線ネットワークのリスト取得
GET "/api/wlan/scan"
必要制限: NetworkView
パラメータ: (任意)rescan=true/false, false を指定するとキャッシュされているスキャン結果を出力します。
出力: リスト
[ATDE ~]$ curl_rest https://armadillo.local:58080/api/wlan/scan
[{"id":"my_ap","signal":74,"bssid":"04:42:1A:E4:78:0C","chan":44,"rate":"540 Mbit/s","security":"WPA2 WPA3"},{"id":"other_ap","signal":65,"bssid":"AC:44:F2:56:22:38","chan":1,"rate":"130 Mbit/s","security":"WPA2"}]
http code: 200
*無線ネットワークの接続
POST "/api/wlan/connect"
必要制限: NetworkAdmin
パラメータ: ssid, passphrase, ifname, bssid, hidden. ssid 以外は任意です。
出力: 生成した接続の uuid
[ATDE ~]$ curl_rest https://armadillo.local:58080/api/wlan/connect -d ssid=my_ap -d passphrase=my_passphrase
{"uuid":"178b8c95-fcad-4bb1-8040-5a02b9ad046f"}
http code: 200
無線ネットワーク アクセスポイントの設定
POST "/api/wlan/ap"
必要制限: NetworkAdmin
パラメータ: ssid, passphrase, bridge_addr, hw_mode/channel, interface.
interface は任意です。hw_mode:2.4GHz を使用する場合は "g"、5GHz を使用する場合は "a" を設定します。
channel: 2.4GHz の場合は 1 〜 13、5GHz の場合は 36、40、44、48 を設定します。
hw_mode/channel を設定しない場合は自動的に選択されますが、両方を未設定にすることはできません。
出力: 無し
[ATDE ~]$ curl_rest -d ssid=my_ap -d passphrase=my_passphrase -d bridge_addr=198.51.100.1/24 -d channel=3 https://armadillo.local:58080/api/wlan/ap
http code: 200 | |
|---|
アクセスポイントを設定するとクライアントの接続が無効になります。 |
| |
|---|
クライアントの接続の削除は DELETE "/api/connections/{connection}" で行えます。 |
無線ネットワーク アクセスポイントの削除
DELETE "/api/wlan/ap"
必要制限: NetworkAdmin
パラメータ: interface (任意)
出力: 無し
[ATDE ~]$ curl_rest -X DELETE https://armadillo.local:58080/api/wlan/ap
http code: 200
6.8.6.9. Rest API : WWAN の設定
WWAN の設定追加
POST "/api/wwan"
必要制限: NetworkAdmin
パラメータ: apn, user, password, auth_type (CHAP/PAP, デフォルト CHAP), mccmnc, ipv6 (bool、デフォルト true)
apn 以外は任意です。
出力: 追加された接続の uuid
[ATDE ~]$ curl_rest -d apn=provider.tld -d user=provider -d password=provider https://armadillo.local:58080/api/wwan
{"uuid":"ce603d3e-838b-4ac8-b7fd-6a3f1abe4003"}
http code: 200
WWAN の設定削除
DELETE "/api/wwan"
必要制限: NetworkAdmin
パラメータ: 無し
出力: 無し
[ATDE ~]$ curl_rest -X DELETE https://armadillo.local:58080/api/wwan
http code: 200
| |
|---|
WWAN の設定確認または一時的な切断は connection の API で行ってください。 |
6.8.6.10. Rest API : DHCP の設定
DHCP の設定確認
GET "/api/dhcp"
必要制限: NetworkView
パラメータ: 無し
出力: interface, ip_addr, start_addr, end_addr, lease_time のリスト
[ATDE ~]$ curl_rest https://armadillo.local:58080/api/dhcp
[{"interface":"br_ap","ip_addr":"198.51.100.1/24","start_addr":"198.51.100.10","end_addr":"198.51.100.20","lease_time":"3600"}]
http code: 200
DHCP の設定
POST "/api/dhcp/{interface}"
必要制限: NetworkAdmin
パラメータ: start_addr, end_addr, lease_time
lease_time を設定しなかった場合は 3600 (秒)とする
出力: 無し
[ATDE ~]$ curl_rest https://armadillo.local:58080/api/dhcp/br_ap -d start_addr=198.51.100.10 -d end_addr=198.51.100.20
http code: 200
DHCP の設定削除
DELETE "/api/dhcp/{interface}"
必要制限: NetworkAdmin
パラメータ: 無し
出力: 無し
[ATDE ~]$ curl_rest -X DELETE https://armadillo.local:58080/api/dhcp/br_ap
http code: 200
6.8.6.11. Rest API : NAT の設定
NAT (masquerade) の設定確認
GET "/api/nat"
必要制限: NetworkView
パラメータ: 無し
出力: NAT されている interface のリスト
[ATDE ~]$ curl_rest https://armadillo.local:58080/api/nat
[{"interface":"eth0"}]
http code: 200
NAT の設定
POST "/api/nat/{interface}"
必要制限: NetworkAdmin
パラメータ: 無し
出力: 無し
[ATDE ~]$ curl_rest -X POST https://armadillo.local:58080/api/nat/eth0
http code: 200
NAT の削除
DELETE "/api/nat/{interface}"
必要制限: NetworkAdmin
パラメータ: 無し
出力: 無し
[ATDE ~]$ curl_rest -X DELETE https://armadillo.local:58080/api/nat/eth0
http code: 200
ポートフォワードの設定確認
GET "/api/port_forwarding"
必要制限: NetworkView
パラメータ: 無し
出力: フォワードされてるポート
[ATDE ~]$ curl_rest https://armadillo.local:58080/api/port_forwarding
[{"interface":"eth0","protocol":"tcp","dport":"22","destination":"127.0.0.1","destination_port":"2222"}]
http code: 200
ポートフォワードの設定
POST "/api/port_forwarding"
必要制限: NetworkAdmin
パラメータ: interface, protocol (デフォルト tcp), dport, destination, destination_port
出力: 無し
[ATDE ~]$ curl_rest https://armadillo.local:58080/api/port_forwarding -d interface=eth0 -d dport=22 -d de
stination=127.0.0.1 -d destination_port=2222
http code: 200
ポートフォワードの削除
DELETE "/api/port_forwarding"
必要制限: NetworkAdmin
パラメータ: interface, protocol (デフォルト tcp), dport, destination, destination_port
出力: 無し
[ATDE ~]$ curl_rest https://armadillo.local:58080/api/port_forwarding -X DELETE -H "Content-Type: application/json" -d '{"interface":"eth0","protocol":"tcp","dport":"22","destination":"127.0.0.1","destination_port":"2222"}'
http code: 200
6.8.6.12. Rest API : VPN の設定VPN クライアントは、現在 OpenVPN をサポートしています。 -
VPN の設定
POST "/api/vpn/openvpn"
必要権限: VpnAdmin
パラメータ: setting_name, conf, auth_type, username, password, cert, key, key_pass
setting_name: 設定名です。任意の文字列を設定してください。
conf: OpenVPN の設定ファイルです。
auth_type: 認証方式です。userpass(ユーザ名とパスワード) または cert(証明書) を設定してください。
username: auth_type が userpass の場合、ユーザ名を設定します。
password: auth_type が userpass の場合、パスワードを設定します。
cert: auth_type が cert の場合、証明書ファイルを設定します。OpenVPN の設定ファイルに含まれている場合は不要です。
key: auth_type が cert の場合、鍵ファイルを設定します。OpenVPN の設定ファイルに含まれている場合は不要です。
key_pass: 鍵がパスワードで保護されている場合、そのパスワードを設定します。
出力: 無し
| |
|---|
コンテナ内から VPN 設定の Rest API を使う場合、 Armadillo 上に alpine_openvpn コンテナイメージが存在していないと、
正しく設定されません。このコンテナイメージが存在していない場合、先に ABOS Web の Web UI やコンテナ外からの Rest API で
設定を行ってください。一度 alpine_openvpn コンテナイメージがインストールされれば、コンテナ内からも Rest API で設定できます。
alpine_openvpn コンテナイメージは VPN 設定を削除しても残り続けますが、VPN 設定を削除した後に
swupdate でアップデートを行うと削除されますので、その場合は再度 alpine_openvpn コンテナイメージのインストールを行う必要があります。 |
-
VPN の接続
POST "/api/vpn/up"
必要権限: VpnAdmin
パラメータ: 無し
出力: 無し
[ATDE ~]$ curl_rest -X POST https://armadillo.local:58080/api/vpn/up
http code: 200 -
VPN の切断
POST "/api/vpn/down"
必要権限: VpnAdmin
パラメータ: 無し
出力: 無し
[ATDE ~]$ curl_rest -X POST https://armadillo.local:58080/api/vpn/down
http code: 200 -
VPN 設定の削除
DELETE "/api/vpn/openvpn"
必要権限: VpnAdmin
パラメータ: 無し
出力: 無し
[ATDE ~]$ curl_rest -X DELETE https://armadillo.local:58080/api/vpn/openvpn
http code: 200 6.8.6.13. Rest API : 時刻の設定-
時刻の状況確認
GET "/api/time/ntp_info"
必要権限: TimeView
パラメータ: 無し
出力: time_now: epoch 形式の現在時刻、ntp_server_ip: 現在同期中のサーバーアドレス。同期されていない場合は「null」となります。
ntp_server_offset: 現在同期中のサーバーとの時刻の遅れ(マイナスの場合は Armadillo がサーバーより早いです)
[ATDE ~]$ curl_rest https://armadillo.local:58080/api/time/ntp_info
{"ntp_server_ip":"203.0.113.10","ntp_server_offset":"-0.000015824","time_now":1710139558}
http code: 200-
NTP の設定確認
GET "/api/time/ntp_config"
必要権限: TimeView
パラメータ: 無し
出力: servers: 同期する対象、initstepslew: Armadillo 起動時に同期するかどうかの設定
[ATDE ~]$ curl_rest https://armadillo.local:58080/api/time/ntp_config
{"servers":["pool pool.ntp.org iburst"],"initstepslew":"10 pool.ntp.org"}
http code: 200-
NTP の設定
POST "/api/time/ntp_config"
必要権限: TimeAdmin
パラメータ: servers: 同期する対象、initstepslew: Armadillo 起動時に同期するかどうかの設定。パラメータを送信しない場合は設定されません。
値が空の場合は設定が削除されて、「 default 」の場合は Armadillo Base OS のデフォルトに戻ります。
出力: 取得時と同じ
[ATDE ~]$ curl_rest https://armadillo.local:58080/api/time/ntp_config -X POST -d "servers=server 203.0.113.10 iburst" -d "servers=server 203.0.113.11 iburst" -d "initstepslew="
{"servers":["server 203.0.113.10 iburst","server 203.0.113.11 iburst"],"initstepslew":null}
http code: 200
[ATDE ~]$ curl_rest https://armadillo.local:58080/api/time/ntp_config -X POST -d "servers=default&initstepslew=default"
{"servers":["pool pool.ntp.org iburst"],"initstepslew":"10 pool.ntp.org"}
http code: 200-
タイムゾーンの確認
GET "/api/time/timezone"
必要権限: TimeView
パラメータ: 無し
出力: timezone: 使用されているタイムゾーン
[ATDE ~]$ curl_rest https://armadillo.local:58080/api/time/timezone
{"timezone":"Asia/Tokyo"}
http code: 200-
タイムゾーンの設定
POST "/api/time/timezone"
必要権限: TimeAdmin
パラメータ: timezone: 設定するタイムゾーン
出力: 無し
[ATDE ~]$ curl_rest https://armadillo.local:58080/api/time/timezone -X POST -d "timezone=Asia/Tokyo"
http code: 200 -
時刻を強制的に設定する
POST "/api/time/set"
必要権限: TimeAdmin
パラメータ: timestamp: epoch 形式の時刻
出力: 無し
[ATDE ~]$ curl_rest https://armadillo.local:58080/api/time/set -X POST -d "timestamp=$(date +%s)"
http code: 200 6.8.6.14. Rest API : 電源制御
再起動
POST "/api/reboot"
必要権限: Reboot
パラメータ: 無し
出力: 無し
[ATDE ~]$ curl_rest -X POST https://armadillo.local:58080/api/reboot
http code: 200
停止
POST "/api/poweroff"
必要権限: Poweroff
パラメータ: 無し
出力: 無し
[ATDE ~]$ curl_rest -X POST https://armadillo.local:58080/api/poweroff
http code: 200
6.8.6.15. Rest API : ABOS Web 制御
リスタート
POST "/api/abosweb/restart"
必要権限: AbosWebRestart
パラメータ: 無し
出力: コネクションリセット。ABOS Web はリスタートする前に一度終了するためコネクションリセットが発生します。
[ATDE ~]$ curl_rest -X POST https://armadillo.local:58080/api/abosweb/restart
http code: 000
curl: (52) Empty reply from server
6.8.6.16. Rest API : ユーザー設定とユーザーデータの管理
ユーザー設定とユーザーデータの削除
POST "/api/reset_default"
必要権限: ResetDefault
パラメータ: 無し
出力: abos-ctrl reset-default の出力 (stdout または stderr)、および出力ステータス (exit_code または exit_signal)
[ATDE ~]$ curl_rest -X POST https://armadillo.local:58080/api/reset_default
{"stdout":"rm -f /etc/NetworkManager/system-connections/*\n"}
{"stdout":"persist_file -r /etc/NetworkManager/system-connections\n"}
{"stdout":"persist_file -r /etc/dnsmasq.d\n"}
{"stdout":"rc-service dnsmasq restart\n"}
{"stdout":"/etc/init.d/iptables save\n"}
{"stdout":"sed -i -e '/NETAVARK/d' /etc/iptables/rules-save\n"}
{"stdout":"persist_file /etc/iptables/rules-save\n"}
{"stdout":"podman stop -a\n"}
{"stdout":"find /var/app/volumes /var/log -mindepth 1 -delete\n"}
{"stdout":"Starting clone to /dev/mmcblk0p1\n"}
{"stdout":"Cloning rootfs\n"}
{"stdout":"Updating appfs snapshots\n"}
{"stdout":"Reusing up-to-date bootloader\n"}
{"stdout":"Rollback clone successful\n"}
{"stderr":"WARNING: Rebooting!\n"}
{"exit_code":0}
http code: 200
6.8.6.17. Rest API : カスタムスクリプトの実行ユーザが Armadillo に追加したスクリプトを Rest API を使用して実行することができます。
実行したいスクリプトに実行権限を付与し、Armadillo の /etc/atmark/abos_web/customize_rest ディレクトリ下に置いてください。 実行に root 権限が必要なスクリプトの場合は、 以下のように /etc/doas.d/abos_web_customize.conf にスクリプトを追加してください。 [armadillo ~]# cat /etc/doas.d/abos_web_customize.conf
permit nopass abos-web-admin as root cmd /etc/atmark/abos_web/customize_rest/root_command.sh
任意のスクリプト実行
POST "/api/custom/{script}"
必要制限: Custom
パラメータ: args でスクリプトの引数を順番に指定できます。
root を true に設定すると root 権限でスクリプトを実行します。
出力: /etc/atmark/abos_web/customize_rest/{script} {args} {args...} を実行して、
そのスクリプトの出力を stdout/stderr で返します。スクリプトが終了した際の出力ステータスは exit_code または exit_signal (どちらも int) です。
[armadillo ~]# cat /etc/atmark/abos_web/customize_rest/print_args.sh
#!/bin/sh
printf "arg: %s\n" "$@"
[ATDE ~]$ curl_rest -X POST https://armadillo.local:58080/api/custom/print_args.sh \
-H 'Content-type: application/json' -d '{"args": ["param", "second arg"], "root":false}'
{"stdout":"arg: param\n"}
{"stdout":"arg: second arg\n"}
{"exit_code":0}
| |
|---|
標準の ABOS Web には最小限の権限しか与えていません。
root 権限でスクリプトを実行する場合、 Armadillo の故障やセキュリティにも関わりますので、十分注意して追加してください。 |
カスタマイズと Rest API トークン以外の設定内容と、
ユーザーデータを一括削除することができます。 ユーザーデータの削除では以下のデータを削除します。 -
/var/app/volumes ディレクトリ下のファイルを全て
-
/var/log ディレクトリ下のファイルを全て
ABOS Web のトップページから、「設定管理」ページへ移動し「ユーザー設定とユーザーデータの削除」にある
「削除」ボタンを押すと削除できます。削除後は Armadillo が再起動するので引き続き ABOS Web を使用する場合は、
再起動が完了してからアクセスしてください。 図6.110「ABOS Web を停止する」に ABOS Web のサービスを停止する方法を示します。 |
OpenRC に ABOS Web のサービスが登録されていることを確認します。
| |
ABOS Web のサービスが起動していることを確認します。
| |
ABOS Web のサービスを停止します。
| |
サービスを管理している OpenRC から ABOS Web のサービスの登録を解除します。
| |
サービス設定ファイルの削除を永続化します。
|
ABOS Web を停止すると ABOS Web の Rest API も使用できなくなります。 図6.111「ABOS Web を起動する」に ABOS Web のサービスを起動する方法を示します。 |
OpenRC に ABOS Web のサービスが登録されていないことを確認します。何も出力されなければ登録されていません。
| |
サービスを管理している OpenRC に ABOS Web のサービスを登録します。
| |
ABOS Web のサービスを起動します。
| |
サービス設定ファイルを永続化します。
|
6.9. ABOSDE から ABOS Web の機能を使用するABOSDE は以下に示す ABOS Web の情報取得や動作を行うことができます。 -
Armadillo の SWU バージョンを取得する
-
Armadillo のコンテナの情報を取得する
-
Armadillo のコンテナを起動・停止する
-
Armadillo のコンテナのログを取得する
-
Armadillo に SWU をインストールする
ABOSDE は ABOS Web の Rest API を用いて通信を行っていますので、ABOS Web にパスワードでログインができる状態である必要があります。
ABOS Web へのログインを行っていない場合は「ABOS Web とは」を参考にしてください。 ABOSDE から ABOS Web の機能を使用するには通信を行う対象の Armadillo を選択する必要があります。
図6.112「ABOSDE で ローカルネットワーク上の Armadillo をスキャンする」 の赤枠で囲まれているボタンをクリックすることで、ローカルネットワーク上で ABOS Web が動作している Armadillo をスキャンすることができます。
ただし、ATDE のネットワークを NAT に設定している場合は Armadillo がリストに表示されません。 ABOSDE から ABOS Web に初めて通信を行う時、ABOS Web は通信に使用するためのトークンを発行します。
そのため、ABOSDE では 図6.113「ABOSDE の ABOS Web パスワード入力画面」 のように ABOS Web のパスワードを求められますので、設定したパスワードを入力してください。 6.9.2. Armadillo のコンテナの情報を取得するローカルネットワーク上の Armadillo をスキャンした後に、
図6.115「ABOSDE で Armadillo のコンテナ情報を取得」 の赤枠で囲まれているボタンをクリックすることで、選択した Armadillo のコンテナの情報を取得できます。
表示されるコンテナの情報は以下の通りとなります。 -
state : コンテナが起動中の場合は running、コンテナが停止中の場合は exited
-
image : コンテナのイメージ名
-
command : コンテナ起動時に実行しているコマンド
6.9.5. Armadillo に SWU をインストールするローカルネットワーク上の Armadillo をスキャンした後に、
図6.119「ABOSDE で Armadillo に SWU をインストール」 の赤枠で囲まれているボタンをクリックすることで、選択した Armadillo に SWU をインストールすることができます。
SWU インストールのログは VS Code 画面下部の OUTPUT に表示されます。 VPU や NPU などを使うアプリケーションを ATDE 上で開発する場合や、Armadillo Base OS 上のコンテナ内で動作させる場合、ライブラリを ATDE 上でビルドする必要があります。
ここではその手順について説明します。 | v20230911 未満のATDEバージョンの場合 |
|---|
v20230911 未満のATDEバージョンの場合は、ここでの手順を行う前に、以下にしたがってクロスコンパイル用ライブラリをインストールしてください。
(ATDE のバージョン v20230911 以上では、クロスコンパイル用ライブラリはインストール済みのため、
以下のインストール手順は不要です。) ライブラリのビルドツールを実行する準備として、gitのユーザ名とメールアドレスの設定を行い、
ビルドツールである at-imxlibpackage をインストールします。
その後、ビルドツールを実行します。 実行中にライセンスへの同意を求められます。内容を確認の上、同意する場合は y を入力して処理を進めてください。
実行が完了すると、ATDE にクロスコンパイル用のライブラリがインストールされます。 |
6.10.1. Armadillo へ書き込むためのライブラリイメージを作成する以下に示す製品では、出荷状態でライブラリイメージが Armadillo に書き込まれています。
このため、ここで説明する手順はライブラリをアップデートする場合や、
「ブートディスクの作成」 または 「初期化インストールディスクの作成」 の手順に従ってディスクイメージを作成する場合に
必要となります。 表6.11 ライブラリイメージ書き込み済みの製品 | 名称 | 型番 |
|---|
Armadillo-IoTゲートウェイ G4 LANモデル開発セット | AGX4500-C00D0 | Armadillo-IoTゲートウェイ G4 LANモデル量産用 | AGX4500-C00Z | Armadillo-IoTゲートウェイ G4 LANモデル量産ボード | AGX4500-U00Z | Armadillo-IoTゲートウェイ G4 LTEモデル開発セット | AGX4520-C02D0 | Armadillo-IoTゲートウェイ G4 LTEモデル量産用 | AGX4520-C02Z | Armadillo-IoTゲートウェイ G4 LTE+WLANモデル開発セット | AGX4520-C03D0 | Armadillo-IoTゲートウェイ G4 LTE+WLANモデル量産用 | AGX4520-C03Z | Armadillo-IoTゲートウェイ G4 WLANモデル量産用 | AGX4500-C03Z | Armadillo-IoTゲートウェイ G4 WLANモデル量産ボード | AGX4500-U03Z |
Armadillo Base OS 上のコンテナ内から利用できるイメージを作成します。 VPU を使用しない場合は、--without-vpu オプションを付けてください。 実行が完了すると imx_lib.img というファイルが生成されます。 6.10.2. Armadillo にライブラリイメージを書き込むArmadillo Base OS 上で、「Armadillo へ書き込むためのライブラリイメージを作成する」で作成した imx_lib.img を eMMC の /dev/mmcblk2p4 パーティションに書き込みます。 次のコマンドは、 imx_lib.img が /tmp にある場合の実行例です。 書き込みが完了した後、/opt/firmware にマウントします。 6.10.3. ライブラリイメージのバージョンを確認するArmadillo に書き込んだライブラリイメージのバージョンは、次のコマンドを実行することで確認できます。 | |
|---|
図6.126「ライブラリバージョンの確認」によるバージョン確認方法は、ライブラリイメージのバージョンが2.2.0以降の場合のみ可能です。
ライブラリイメージのバージョンが2.2.0未満の場合、/opt/firmware/etc/imxlib_versionファイルは存在しません。 |
6.10.4. コンテナ内からライブラリを使用するための準備コンテナ内からライブラリを使用するためには、コンテナ作成時にライブラリの場所を明示する必要があります。 podman_start のコンテナコンフィグに add_volumes コマンドでファームウェアが書き込まれているディレクトリ (/opt/firmware) を、add_args で podman run の --env オプションにライブラリのパスを指定します。次の例では、コンテナイメージに Debian(bullseye) を利用しています。
-
/opt/firmware を渡すコンテナコンフィグの例
[armadillo ~]$ vi /etc/atmark/containers/container_name.conf
add_volumes /opt/firmware:/opt/firmware:ro
add_args --env=LD_LIBRARY_PATH=/opt/firmware/usr/lib/aarch64-linux-gnu
set_image docker.io/debian:bullseye
set_command sleep infinity
[armadillo ~]# podman_start container_name
Starting 'container_name'
5c2078ff7d54082c1d18b6c4f026c36675328cea61ee6a1ab1b27145df18d72a |
add_volumes で /opt/firmware を渡します。
| |
--env に LD_LIBRARY_PATH を指定し、コンテナ内のアプリケーションからライブラリをリンクできるようにします。
|
次に、コンテナにログインし、/opt/firmware/usr/lib/aarch64-linux-gnu/imx-mm へのシンボリックリンクを
/usr/lib/aarch64-linux-gnu/ に作成します。 以上で、コンテナからライブラリを使用できるようになります。 | |
|---|
at-debian-image のコンテナを使用する場合には、変数やリンクがすでに作成されていますので add_volumes だけでライブラリを使えます。
|
6.11.1. GStreamer - マルチメディアフレームワーク6.11.1.1. GStreamer - マルチメディアフレームワークとはGStreamer は、オープンソースのマルチメディアフレームワークです。小さなコアライブラリに様々
な機能をプラグインとして追加できるようになっており、多彩な形式のデータを扱うことができます。
GStreamer で扱うことができるデータフォーマットの一例を下記に示します。 -
コンテナフォーマット: mp4, avi, mpeg-ps/ts, mkv/webm, ogg
-
動画コーデック: H.264/AVC, VP8, VP9
-
音声コーデック: AAC, MP3, Theora, wav
-
画像フォーマット: JPEG, PNG, BMP
-
ストリーミング: http, rtp
GStreamer では、マルチメディアデータをストリームとして扱います。
ストリームを流すパイプラインの中に、エレメントと呼ばれる処理単位を格納し、
それらを繋ぎ合わせることで、デコードやエンコードなどの処理を行います。 6.11.2. GStreamer 実行用コンテナを作成するこの章における GStreamer の実行例はアットマークテクノが提供する
debian イメージから作成したコンテナ内で実行することを想定しています。
ここではアットマークテクノが提供するイメージからコンテナを作成します。
このイメージに関しては 「アットマークテクノが提供するイメージを使う」 を参照してください。 コンテナ内では最初に GStreamer をインストールします。 次に、コンテナ内で画面表示を行うためのデスクトップ環境を起動します。
ここでは weston を起動します。 --tty=7 のオプションは画面表示に使用する tty の値を設定してください。 次に、音声を出力するのに必要な pulseaudio を起動します。 以上により、GSreamer をコンテナ内で実行できるようになります。 6.11.3. GStreamer パイプラインの実行例パイプラインの実行例を以下に示します。 GStreamer のパイプラインは、シェルスクリプトのパイプ構文の構造に似ています。GStreamer の
各エレメントとシェルスクリプト内のコマンドを対比することができます。構文的な違いとして、
GStreamer のパイプラインは「!」を使って各エレメントを繋ぎますが、シェルスクリプトは「|」を使います。 上記例は、GStreamer のデバッグ/プロトタイピング用のコマンドラインツールである gst-launch-1.0
を使って説明しましたが、GStreamer はライブラリとして提供されているため、GStreamer を使った
マルチメディア機能を自作のアプリケーションプログラムに組み込むことができます。API や
アプリケーション開発マニュアルは、gstreamer.freedesktop.org の Documentation ページ
(http://gstreamer.freedesktop.org/documentation/)から参照することができます。 Armadillo-IoT ゲートウェイ G4が採用している SoC である i.MX 8M Plus は、動画のデコード/エンコードを行うための Video Processing Unit(VPU) と呼ばれる
専用プロセッサを搭載しています。Armadillo-IoT ゲートウェイ G4には、この VPU を使用するための GStreamer エレメントがインストールされており、
以下の動画コーデックではメイン CPU のパフォーマンスを落とすことなく動画のデコード/エンコードが行なえます。
デコード可能なコーデック
エンコード可能なコーデック
以降の章では、これらのコーデックに対する GStreamer の実行例を紹介します。 上記で挙げたコーデック以外のものであってもデコード/エンコードは可能ですが、その場合は CPU を使ったソフトウェア処理となってしまうため、
システム全体のパフォーマンスは低下します。 GStreamer を使用して動画を再生するための実行例を、音声を含んでいる動画と含んでいない動画の 2 通りについて示します。
VPU でハードウェアデコードを行う GStreamer エレメントとして vpudec を使うことができます。 6.11.4.1. H.264/AVC 動画を再生するGStreamer を使用してネットワーク上にある動画ファイルを HTTP 及び RTSP でストリーミング再生する実行例を示します。
VPU でハードウェアデコードを行う GStreamer エレメントとして vpudec を使うことができます。 6.11.6. USB カメラからの映像を表示するGStreamer の v4l2src エレメントを使うことで、V4L2(Video for Linux 2) デバイスとして実装されているカメラデバイスから映像を取得できます。
どのデバイスから映像を取得するかは、v4l2src エレメントの device プロパティにデバイスファイル名を指定することで変更できます。
UVC 対応 USB カメラなども同様に v4l2src で扱うことができるので、ここでは USB カメラからの映像を表示する実行例を示します。 加えて、カメラの他にマイクも接続していて、同時にマイクからの音声も出力する場合の例も示しています。
実行例中のデバイスファイル /dev/video1 の部分や、縦横サイズである width や height の値は実行する環境によって異なる可能性がありますので、適宜変更してください。
また、/dev/v4l/by-id ディレクトリの下に、接続しているカメラ名の付いた /dev/videoN へのシンボリックリンクがありますので、デバイスとしてそれを指定することも可能です。 GStreamer の v4l2src エレメントを使うことで、V4L2(Video for Linux 2) デバイスとして実装されているカメラデバイスから映像を取得できます。
どのデバイスから映像を取得するかは、v4l2src エレメントの device プロパティにデバイスファイル名を指定することで変更できます。
UVC 対応 USB カメラなども同様に v4l2src で扱うことができるので、ここでは USB カメラからの映像をファイルへ保存する実行例と、
映像を表示しながら同時にファイルへ保存する実行例を示します。 加えて、カメラの他にマイクも接続していて、映像の保存と同時にマイクからの音声も MP3 へエンコードして保存する場合の例も示しています。
実行例中のデバイスファイル /dev/video1 の部分や、縦横サイズである width や height の値は実行する環境によって異なる可能性がありますので、適宜変更してください。
また、/dev/v4l/by-id ディレクトリの下に、接続しているカメラ名の付いた /dev/videoN へのシンボリックリンクがありますので、デバイスとしてそれを指定することも可能です。 パイプライン停止時に EOS イベントを発行するように、gst-launch-1.0 コマンドに-e オプションを付けています。
エンコードを終了するには、Ctrl-C で gst-launch-1.0 コマンドを停止してください。 6.11.7.1. H.264/AVC で録画するVPU でハードウェアエンコードを行う GStreamer エレメントとして vpuenc_h264 を使うことができます。 6.11.8. Video Processing Unit(VPU)6.11.8.1. Video Processing Unit とはVideo Processing Unit(以下、VPU) とは i.MX 8M Plus に搭載されている、動画のエンコード/デコード処理専用のプロセッサです。
動画のエンコード/デコード処理は、システムに負荷をかけることが多く、メイン CPU で処理を行うとシステム全体のパフォーマンスが低下します。
VPU を利用することでシステム全体のパフォーマンスを落とすことなく、動画のエンコード/デコード処理を行うことができます。 VPU が対応しているフォーマットは以下の通りです。
デコーダーが対応しているフォーマット
エンコーダが対応しているフォーマット
表6.12 H.264/AVC デコーダー仕様 Profile | High、Main、Baseline | Min resolution | 48x48 | Max resolution | 1920x1080 | Frame rate | 60 fps | Bitrate | 60 Mbps |
表6.13 VP8 デコーダー仕様 Profile | - | Min resolution | 48x48 | Max resolution | 1920x1080 | Frame rate | 60 fps | Bitrate | 60 Mbps |
表6.14 VP9 デコーダー仕様 Profile | Profile 0, 2 | Min resolution | 72x72 | Max resolution | 1920x1080 | Frame rate | 60 fps | Bitrate | 100 Mbps |
表6.15 H.264/AVC エンコーダー仕様 Profiles | Baseline、Main、High、High 10 | Maximum Luma pixel sample rate | 1920x1080 @ 60 fps | Slices | I, P and B slices | Frame Types | Progressive | Entropy encoding | CABAC、CAVLC | Error resilience | Slices | Maximum MV range | Horizontal (P slice) in pixels: +/-139
Horizontal (B slice) in pixels: +/-75
Vertical (P or B slice) in pixels:
-
Config1: +/-13 (planned)
-
Config2: +/-21
-
Config3: +/-29 (planned)
-
Config4: +/-45 (planned)
-
Config5: +/-61 (planned)
(= Search Window Size -3 pixels) | MV accuracy | 1/4 pixel | Supported block sizes | Macroblock and sub-macroblock partitions:
-
Intra PU: 16x16 / 8x8 / 4x4
-
Inter PU: 16x16 / 8x16 / 16x8
-
TU: 4x4 and 8x8 transforms
| Intra-prediction modes | 16x16: 4 modes
8x8: 9 modes
4x4: 9 modes | Maximum number of reference frames | 2 | Encoding picture type | Only progressive frame | IPCM encoding | Supported | Temporal scalable video coding | Up to 5 layers including the base layer | IPCM | IPCM rectangle mode | ROI / ROI_map | Absolute QP and qpoffset mode (-32 〜 31)
User controllable CU coded as IPCM CU or skip CU |
この章では、アットマークテクノが提供するデモアプリケーションについて説明します。
デモアプリケーションは GUI アプリケーションであるため、ディスプレイを接続している必要があります。
デモアプリケーションを実行するためのコンテナイメージとして、アットマークテクノが提供する
コンテナイメージを想定しています。
このイメージに関しては 「アットマークテクノが提供するイメージを使う」 を参照してください。 また、パッケージのインストールにはデフォルトの tmpfs の容量が少ないので、
あらかじめ abos-ctrl podman-storage --disk で
podman のストレージを eMMC に切り替えてください。開発が終わったら必ず tmpfs に戻ってください。 デモアプリケーションを実行するためのコンテナを以下のように作成します。 デモアプリケーションは GUI アプリケーションであるため、
まずデスクトップ環境を起動する必要があります。ここでは weston を起動します。 6.12.2. デモアプリケーションランチャを起動するデモアプリケーションランチャを起動します。
個々のデモアプリケーションはこのデモアプリケーションランチャから起動できます。
このデモアプリケーションランチャは GUI フレームワークとして Flutter を使用しています。
デモアプリケーションランチャのソースコードは、apt source で取得することができます。 以下のようなアプケーションが起動します。 左側のカテゴリから起動したいデモアプリケーションを選びます。 選んだアプリケーションは、右下の「起動」ボタンで起動することができます。 | |
|---|
デモアプリケーションには TensorFlow Lite と NPU を使用するものが含まれています。
TensorFlow Lite と NPU を扱うライブラリのバージョンによっては、デモアプリケーションが正しく動作しない場合があります。
以下のバージョンになっていることを確認してください。 表6.16 デモアプリケーション動作のために必要なバージョン | パッケージ名 | 必要バージョン |
|---|
tensorflow-lite | 2.8.0 以上 | python3-tflite-runtime | 2.8.0 以上 | tensorflow-lite-vx-delegate | 2.8.0 以上 | tim-vx | 1.1.39 以上 |
各パッケージのバージョンは、コンテナ内で以下のコマンドを実行することで確認できます。
以下は、tensorflow-lite のバージョンを確認する例です。
バージョンの条件を満たしていない場合は、 apt update && apt upgrade を実行してアップデートを行ってください。 |
mediaplayer は動画を再生するアプリケーションです。H.264, VP8, VP9 でエンコードされた
動画ファイルであれば、動画のデコードに VPU が使われます。File メニューから、再生したい
動画ファイルを選択することができます。
このアプリケーションは、GUI フレームワークとして wxWidgets を使用しています。 音声も出力したい場合は、pulseaudio をインストールして起動する必要があります。 video recoder は gstreamer を使用してカメラからの映像を録画することができます。
そのため、このアプリケーションを使用するためには、Armadillo 本体にカメラを接続する必要があります。
カメラが接続されていると Video device の項目でカメラを選択できるようになります。
カメラを選択し、Start ボタンを押すと別ウィンドウが表示され録画が開始されます。
アプリケーション上のテキストボックスには、Start ボタンを押したときに起動する gstreamer の
コマンドを表示しています。テキストボックスの内容はキーボードで編集可能です。
このアプリケーションは、GUI フレームワークとして wxWidgets を使用しています。 マイク付きのカメラなどで同時に音声も録音したい場合は、「mediaplayer」 を参照して
pulseaudio を起動してください。 6.12.5. led switch testerled switch tester は Armadillo 本体上の LED と SW1 を扱うアプリケーションです。
LED ボタンを押すことで Armadillo 本体上の LED の 点灯・消灯を確認することができます。
Armadillo 本体上の SW1 を押すとアプリケーションの SW1 部分の表示が変化することを確認できます。
このアプリケーションは、GUI フレームワークとして wxWidgets を使用しています。 rtc tester は Armadillo 本体上の RTC に対して日時の設定および取得が行えるアプリケーションです。
カレンダー上から日付を選び、Time に設定したい時刻を入力した後、Set ボタンを押すと RTC にその日時が
設定されます。Get ボタンを押すと、現在の日時を RTC から読み込みアプリケーション上に反映されます。
このアプリケーションは、GUI フレームワークとして wxWidgets を使用しています。 6.12.7. object detection demoobject detection demo はカメラからの映像に対して物体認識を行うアプリケーションです。
NPU を使用しているため高速に物体認識を行えます。画面の左側には認識した物体を囲む四角形が表示され、
右側には認識した物体のラベルとスコアが表示されます。
このアプリケーションは機械学習のライブラリとして TensorFlow Lite を使用しています。 起動する前に、必要な Python ライブラリをインストールする必要があります。 このアプリケーションはカメラデバイスとしてデフォルトで /dev/video2 を使用します。
お使いの環境によって別のカメラデバイスに設定したい場合は、以下のファイルを変更してください。 |
--camera_id の値を環境に合わせて変更します。
|
6.12.8. pose estimation demopose estimation demo はカメラに映った人物の姿勢を推定して表示するアプリケーションです。
NPU を使用しているため高速に姿勢推定を行えます。推定した姿勢は人物の上に重ねて表示されます。
このアプリケーションは機械学習のライブラリとして TensorFlow Lite を使用しています。 このアプリケーションは起動してから画面に映像が表示されるまで初回のみ約 1 分ほどかかります。
2回目以降の起動では 5 秒程度で映像が表示されます。
また、カメラデバイスとしてデフォルトで /dev/video2 を使用します。
お使いの環境によって別のカメラデバイスに設定したい場合は、以下のファイルを変更してください。 |
--camera_id の値を環境に合わせて変更します。
|
6.12.9. image segmentation demoimage segmentation demo はカメラに映った人物の「人物として認識された領域(セグメント)」を推定して表示するアプリケーションです。
NPU を使用しているため高速に領域推定を行えます。推定した領域は人物の上に青の透過色で重ねて表示されます。
このアプリケーションは機械学習のライブラリとして TensorFlow Lite を使用しています。 このアプリケーションはカメラデバイスとしてデフォルトで /dev/video2 を使用します。
お使いの環境によって別のカメラデバイスに設定したい場合は、以下のファイルを変更してください。 |
--camera_id の値を環境に合わせて変更します。
|
6.12.10. super resolution demosuper resolution demo はカメラの映像の中央部 50 x 50 ピクセルの領域を 200 x 200 ピクセルに解像度を
上げて表示する (超解像) アプリケーションです。NPU を使用しているため高速に超解像を行えます。
このアプリケーションは機械学習のライブラリとして TensorFlow Lite を使用しています。 画面右上は最近傍補間で 200 x 200 ピクセルに拡大した映像、画面右下が超解像で 200 x 200 ピクセルにした映像です。 このアプリケーションは起動してから画面に映像が表示されるまで初回のみ約 1 分ほどかかります。
2回目以降の起動では 5 秒程度で映像が表示されます。
また、カメラデバイスとしてデフォルトで /dev/video2 を使用します。
お使いの環境によって別のカメラデバイスに設定したい場合は、以下のファイルを変更してください。 |
--camera_id の値を環境に合わせて変更します。
|
6.12.11. hand estimation demohand estimation demo はカメラに映った人物の手指を検出してその領域と手の骨格を同時に表示するアプリケーションです。
NPU を使用しているため高速に手指検出を行えます。検出した手指の領域と骨格は手指の上に重ねて表示されます。
このアプリケーションは機械学習のライブラリとして TensorFlow Lite を使用しています。 このアプリケーションは起動してから画面に映像が表示されるまで初回のみ約 30 秒ほどかかります。
2回目以降の起動では 5 秒程度で映像が表示されます。
また、カメラデバイスとしてデフォルトで /dev/video2 を使用します。
お使いの環境によって別のカメラデバイスに設定したい場合は、以下のファイルを変更してください。 |
--camera_id の値を環境に合わせて変更します。
|
6.12.12. screw detection demoscrew detection demo はカメラに映ったネジを検出してその領域を表示するアプリケーションです。
また、領域の大きさからネジの長さを測り、しきい値以下であれば赤枠、それ以外は青枠で領域を囲います。
各種パラメータはコマンドライン引数で指定可能です。 NPU を使用しているため高速にネジの検出を行えます。検出したネジの領域はネジの上に重ねて表示されます。
このアプリケーションは機械学習のライブラリとして TensorFlow Lite を使用しています。 このアプリケーションは起動してから画面に映像が表示されるまで初回のみ約 30 秒ほどかかります。
2回目以降の起動では 5 秒程度で映像が表示されます。
また、カメラデバイスとしてデフォルトで /dev/video2 を使用します。
お使いの環境によって別のカメラデバイスに設定したい場合は、以下のファイルを変更してください。 表6.17 ネジ検出デモのパラメータの詳細 | パラメータ名 | 意味 |
|---|
camera_id | 使用するカメラを指定します。/dev/videoNのNに相当します。 | conf_thres | AIがネジと認識した確度のしきい値です。この値以下の確度の物体はネジとみなされません。 | iou_thres | ネジ検出の後処理に使用するパラメータです。 | len_thres | 長いネジと短いネジの境界値を設定できます。 | visualize_score | これを指定すると、AIがネジと認識した確度を描画します。 | visualize_length | これを指定すると、ネジの長さを描画します。 |
Armadillo-IoT ゲートウェイ G4 は、3G/LTE モジュール を使用した SMS の送受信を行うことができます。
SMS の送信、受信した SMS の確認および削除などの操作は ModemManager の mmcli コマンドで行うことができます。 本章では mmcli コマンドでの SMS の使用方法について説明します。 SMS が利用可能な SIM を挿入して Armadillo-IoT ゲートウェイ G4の電源を入れると、 ModemManager が必要な初期設定を行い、 SMS が利用可能になります。 SMS の受信は自動的に行われます。 図6.160「言語設定」に示すコマンドを実行し、言語設定を行います。 SMS を作成するには、図6.161「SMS の作成」に示すコマンドを実行します。 SMSの作成に成功すると、以下のようにSMS番号が表示されます。SMS番号は送信時に使用します。 図6.163「SMS の送信」に示すコマンドを実行し、SMS 送信を行います。 [SMS番号] には、 SMS の作成時に表示された番号を指定します。 SMS を送信可能な端末から Armadillo-IoT ゲートウェイ G4 に SMS を送信すると、 Armadillo-IoT ゲートウェイ G4 は自動的に SMS を受信します。 また、 EC25-J の内蔵ストレージに 255 件 SMS を保存した状態で Armadillo-IoT ゲートウェイ G4 に SMS を送信した場合は、Armadillo-IoT ゲートウェイ G4 は受信を行いません。 受信を行うには、 EC25-J の内蔵ストレージに保存している SMS を削除するか、他のストレージに移動する必要があります。 図6.164「SMS の一覧表示」のコマンドを実行することで、 SMS 一覧を表示できます。 末尾が "(sent)" となっているものが送信した SMS で "(received)" となっているものが受信した SMS です。 SMS の内容を表示するには、図6.165「SMSの内容を表示」に示すコマンドを実行します。 受信した SMS は自動的に 3G/LTE モジュールの内蔵ストレージに保存されます。Armadillo-IoT ゲートウェイ G4 に搭載されている、 EC25-J は、最大 255 件まで SMS を保存することが可能です。 SMS の内容を表示した際の「storage: me」は、 3G/LTEモ ジュールの内蔵ストレージに SMS が保存されていることを意味しています。 「storage: sm」と表示された場合、 SIM カードのストレージに SMS が保存されています。 SIM カードのストレージに保存できる SMS の件数は SIM カードによって異なります。 ストレージに保存されている SMS は、Armadillo-IoT ゲートウェイ G4 の電源を切断してもデータが保持されます。 6.14. ssh 経由で Armadillo Base OS にアクセスするArmadillo-IoT ゲートウェイ G4 にはopensshがインストールされていますが、デフォルトではSSHサーバーが起動していません。 SSHサーバーを自動的に起動するようにするためには、以下のコマンドを実行してください。 [armadillo:~]# rc-update add sshd
* service sshd added to runlevel default
[armadillo ~]# persist_file /etc/runlevels/default/sshd
[ 2819.277066] EXT4-fs (mmcblk2p1): re-mounted. Opts: (null)
[armadillo ~]# reboot 上記の例では、再起動後も設定が反映されるように、 persist_file コマンドでeMMCに設定を保存しています。 6.15. コマンドラインからネットワーク設定をする基本的に、 Armadillo-IoT ゲートウェイ G4 のネットワーク設定は、「ネットワーク設定」で紹介したとおり、 ABOS Web で行います。
しかし、 ABOS Webで対応できない複雑なネットワーク設定を行いたい場合などは、コマンドラインからネットワークの設定を行うことも可能です。 ここでは、コマンドラインからネットワークを設定する方法について説明します。 Armadillo-IoT ゲートウェイ G4 は、2つの Ethernet ポートが搭載されています。
Linuxからは、それぞれ eth0 、 eth1 に見えます。 表6.18 ネットワークとネットワークデバイス | ネットワーク | ネットワークデバイス | 出荷時の設定 |
|---|
Ethernet | eth0
| DHCP | Ethernet | eth1
| DHCP | 無線 LAN | mlan0
| クライアントモード | 3G/LTE | ttyCommModem
| SIM / 料金プランに依存します |
| |
|---|
eth1(LANインターフェース2)は10Mbps(10BASE-T)に非対応です。10Mbpsで通信を行う場合は、LANインターフェース0(LANインターフェース1)をご利用ください。 |
Armadillo-IoT ゲートウェイ G4 の IP アドレスを確認するには、ip addr コマンドを使用します。 inet となっている箇所が IP アドレスです。
特定のインターフェースのみを表示したい場合は、以下のようにします。
Armadillo-IoT ゲートウェイ G4 では、通常の Linux システムと同様、ネットワークインターフェースの設定は NetworkManager を使用します。
NetworkManager はすべてのネットワーク設定をコネクションとして管理します。コネクションには「どのようにネットワークへ接続するか」、
「どのようにネットワークを作成するか」を記述し、 /etc/NetworkManager/system-connections/ に保存します。
また、1つのデバイスに対して複数のコネクションを保存することは可能ですが、1つのデバイスに対して有効化にできるコネクションは1つだけです。 NetworkManager は、従来の /etc/network/interfaces を使った設定方法もサポートしていますが、本書では nmcli を用いた方法を中心に紹介します。 nmcli は NetworkManager を操作するためのコマンドラインツールです。
図6.171「nmcli のコマンド書式」に nmcli の書式を示します。このことから、 nmcli は「オブジェクト (OBJECT) というものが存在し、
それぞれのオブジェクトに対してコマンド (COMMAND) を実行する。」という書式でコマンドを入力することがわかります。
また、オブジェクトそれぞれに help が用意されていることもここから読み取れます。
ここでは nmcli の、基本的な使い方を説明します。 登録されているコネクションの一覧を確認するには、次のようにコマンドを実行します。
[] 表示された NAME については、以降 [ID] として利用することができます。 コネクションを有効化するには、次のようにコマンドを実行します。 コネクションを無効化するには、次のようにコマンドを実行します。 コネクションを作成するには、次のようにコマンドを実行します。 [ID] にはコネクションの名前(任意)、[type] には ethernet、wifi といった接続タイプ、
[interfacename] にはインターフェース名(デバイス)を入力します。
これにより /etc/NetworkManager/system-connections/ に[ID]の名前でコネクション
ファイルが作成されます。このファイルを vi などで編集し、コネクションを修正する
ことも可能です。 Armadillo-IoT ゲートウェイ G4 を再起動したときにコネクションファイルが消えてしまわないように、
persist_file コマンドで永続化する必要があります。
persist_file コマンドに関する詳細は「persist_file について」を参照してください。 | |
|---|
別の Armadillo-IoT ゲートウェイ G4 からコネクションファイルをコピーした場合は、コネクションファイルの
パーミッションを 600 に設定してください。
600 に設定後、 nmcli c reload コマンドでコネクションファイルを再読込します。 [armadillo ~]# chmod 600 /etc/NetworkManager/system-connections/<コネクションファイル名>
[armadillo ~]# persist_file /etc/NetworkManager/system-connections/<コネクションファイル名>
[armadillo ~]# nmcli c reload swu イメージを使用してコネクションファイルのアップデートを行う場合は、
swu イメージに含めるコネクションファイルのパーミッションを 600 に設定してから、
swu イメージを作成してください。
アップデート実行時には swu イメージ作成時のパーミッションが維持されるため、
上記のコマンド実行手順は不要です。
swu イメージに関しては 「アップデート機能について」 を参考にしてください。 |
コネクションを削除するには、次のようにコマンドを実行します。 これにより /etc/NetworkManager/system-connections/ のコネクションファイルも同時に削除されます。
コネクションの作成と同様に persist_file コマンドで永続化する必要があります。 DHCP に設定する例を、図6.181「DHCP の設定」に示します。 | |
|---|
-ipv4.addresses のように、プロパティ名の先頭に "-" を付けることで設
定したプロパティを削除することができます。反対に "+" を付けることで
プロパティを追加することができます。
|
有効化されているコネクションを修正した場合、かならず修正したコネクションを再
度有効化してください。 デバイスの一覧(デバイス名、タイプ、状態、有効なコネクション)を確認するには、次のようにコマン
ドを実行します。 デバイスを接続するには、次のようにコマンドを実行します。 | |
|---|
デバイスを接続するには、接続しようとしているデバイスの有効なコネク
ションが必要です。"Error: neither a valid connection nor device
given" というメッセージが表示された場合には、 nmcli connection など
で有効なコネクションがあるかを確認してください。 |
デバイスを切断するには、次のようにコマンドを実行します。 有線 LAN で正常に通信が可能か確認します。設定を変更した場合、必ず変更したインターフェースを再度有効化してください。 同じネットワーク内にある通信機器と PING 通信を行います。以下の例では、通信機器が「192.0.2.20」という IP アドレスを持っていると想定しています。 |
-I オプションでインターフェースを指定できます。eth1 を確認する場合は -I eth1 としてください。
|
| |
|---|
有線 LAN 以外のインターフェースが有効化されている場合、ルーティングの設定などにより、ネットワーク通信に有線 LAN が使用されない場合があります。
設定を必ず確認してください。確実に有線 LAN の接続確認をする場合は、有線 LAN 以外のインターフェースを無効化してください。 |
Armadillo-IoT ゲートウェイ G4 WLAN モデルに搭載されている WLAN + BT コンボモジュールで正常に通信が可能か確認します。 例として、WPA2-PSK(AES) のアクセスポイントに接続します。ここでの説明では、
アクセスポイントの ESSID を [essid]、パスフレーズを [passphrase] と表記します。 6.15.6.1. 無線 LAN アクセスポイントに接続する[armadillo ~]# nmcli device wifi connect [essid] password [passphrase] Armadillo-IoT ゲートウェイ G4 を再起動したときに 無線 LAN のコネクションファイルが消えてしまわないように、
図6.176「コネクションファイルの永続化」 を参照してファイルの永続化を行ってください。 6.15.6.2. 無線 LAN の通信を確認する同じネットワーク内にある通信機器と PING 通信を行います。以下の例では、通信機器が「192.0.2.20」
という IP アドレスを持っていると想定しています。 有線 LAN と 無線 LAN の両方が有効になっている場合、常に有線 LAN が優先されます。
確実に無線 LAN の接続確認を行う場合は、無線 LAN 以外のインターフェースを無効化するか、
以下の手順で無線 LAN の優先度を他のインターフェースより高くしてください。 ネットワークインターフェースの優先度を確認します。 Metric の値が低ければ優先度は高くなるので、無線 LAN の Metric の値 600 を有線 LAN の 100 よりも低く設定します。
以下の例では、 50 に設定します。 ここの例で使用している無線 LAN コネクションの [ID] に関しては、 「コネクションの一覧」 の手順で確認してください。 |
Metric が 50 になっていることが確認できます。
|
これにより、有線 LAN と無線 LAN が両方有効な場合でも無線 LAN が優先して使われるようになります。 本章では、Armadillo-IoT ゲートウェイ G4 に搭載されている 3G/LTEモジュールの使用方法について説明します。 | |
|---|
Quectel 製 3G/LTE 通信モジュール EC25-J はドコモ/KDDI/ソフトバンクそれぞれの相互接続性試験を完了しています。 |
6.15.7.1. 3G/LTE データ通信設定を行う前に3G/LTEデータ通信を利用するには、通信事業者との契約が必要です。契約時に通信事業者から貸与されたnanoSIM(UIMカード)とAPN情報を準備します。 | |
|---|
Armadillo-IoT ゲートウェイ G4 の電源が切断されていることを確認してから nanoSIM(UIMカード)を取り付けてください。 |
| |
|---|
本製品は、nanoSIMスロットを搭載しています。 標準/microSIMサイズのSIMカードをnanoSIMサイズにカットしたもの、サイズの異なるものを使用すると、nanoSIMスロットが故障する原因となります。
これらを使用し本製品が故障した場合は、保証期間内であっても保証適用外となります。 |
nanoSIM(UIMカード)の切り欠きを挿入方向に向け、刻印面を上にして挿入してください。挿入位置などは、図3.49「3G/LTE用アンテナおよびnanoSIMカード接続例」 を参照してください。 APNの設定を行うには、次に示す情報が必要です。 -
APN (最大 39 文字)
-
ユーザー名 (最大 127 文字)
-
パスワード (最大 127 文字)
-
認証方式 (PAP または CHAP)
-
PDP Type (IPのみをサポート)
6.15.7.2. 3G/LTEのコネクションを作成する表6.20「APN情報設定例」の内容に設定する例を図6.190「3G/LTEのコネクションの作成」に示します。 表6.20 APN情報設定例 | 項目 | 設定 |
|---|
APN | [apn] | ユーザー名 | [user] | パスワード | [password] | ネットワークデバイス | [wwan] |
ネットワークデバイス [wwan] は、表6.21「通信モジュールのネットワークデバイス」 を参照ください。 表6.21 通信モジュールのネットワークデバイス | 通信モジュール | ネットワークデバイス |
|---|
Quectel 製 EC25-J | ttyCommModem |
コネクション設定を永続化するには、以下のコマンドを入力してください。設定を永続化すると、Armadillo 起動時に自動的にデータ接続を行うようになります。 同一インタフェースへの設定が複数存在する場合、 gsm-[wwan]-1.nmconnection など後ろに数値が付与されますので、図6.190「3G/LTEのコネクションの作成」 入力時のメッセージで生成されたファイル名を確認した上で永続化を実施ください。 | |
|---|
Armadillo Base OS 3.17.3-at.6 以降、 KDDI 網を使用したデータ通信専用 SIM をご利用で LTE 接続ができない場合、 LTE モジュールの IMS を無効に設定することで接続できる可能性があります。 図6.192「LTE モジュールの IMS 無効化コマンド」に示すコマンドを一度入力してください。一度入力すれば LTE モジュールに設定が反映されますので、 Armadillo を起動する度に設定する必要はありません。
|
6.15.7.4. MCC/MNC を指定した 3G/LTE のコネクションを作成するマルチキャリア SIM などを使用する際、MCC (Mobile Country Code) と MNC (Mobile Network Code) を指定してコネクションを作成すると 3G/LTE ネットワークに接続できることがあります。指定する場合は 図6.194「MCC/MNC を指定した 3G/LTE コネクションの作成」 に示すコマンドを実行してください。 [mccmnc] には 44010 などの数字を入力してください。実際に設定する値に関しては、ご契約の通信事業者へお問い合わせください。 6.15.7.6. 3G/LTE モジュールの初期化SIM カードを入れ替えた際、または 「PAP認証を有効にした3G/LTEのコネクションを作成する」 を実施する際には、図6.196「3G/LTEモジュール初期化手順」に示すモジュール初期化を実施してください。 |
再接続サービスを停止します。
| |
ModemManager を停止します。
| |
モジュール初期化処理を実行します。
| |
コンソールに上記ログが表示され、モジュールの再起動を確認後に、再接続サービスを起動します。
|
| |
|---|
停止した ModemManager は 3G/LTE モジュール認識時自動的に再起動しますので、手動での起動は不要です。 |
6.15.7.8. 3G/LTE の接続を確認するご利用になるサービスとの通信を検証する、ICMP に対応しているアドレス (8.8.8.8など) と PING 通信を行うなどの方法で 3G/LTE の接続を確認してください。 6.15.7.9. 3G/LTEコネクションを切断する3G/LTEコネクションを切断するには、図6.199「3G/LTEコネクションを切断する」に示すコマンドを実行します。
3G/LTEコネクションを切断する前に、3G/LTE 再接続サービスを停止しないと再接続処理が実行される為、事前に停止します。 |
3G/LTE 再接続サービスを停止します。
| |
3G/LTE コネクションを切断します。
|
3G/LTE 再接続サービスは、3G/LTE のデータ接続の状態を定期的に監視し、切断を検出した場合に再接続を行うサービスです。 SIM カードが挿入されており、NetworkManager に有効な 3G/LTE コネクションの設定がされているとき、初期設定では 120 秒に一度コネクションの状態を監視します。オプションで SIM カードの認識ができないときに Armadillo の再起動を実施することも可能です。 コネクションが無効になっている場合、切断状態と判定しコネクションを有効にします。 コネクションが有効になっている場合、特定の宛先に PING を実行します。PING がエラーになったとき切断状態と判定し、コネクションの無効化・有効化を行うことで再接続を実施します。 コネクションの無効化・有効化による再接続を実施しても PING がエラーになる場合、電波のオン・オフまたは 3G/LTE モジュールの電源をオン・オフを実施して 3G/LTE の再接続を試みます。どちらを実施するかは設定ファイルの WWAN_FORCE_RESTART_COUNT に依存します。 WWAN_FORCE_RESTART_COUNT が初期値の 10 である場合、1 から 9 回目は電波のオン・オフを実施し、10 回目は3G/LTE モジュールの電源オン・オフを実施します。それ以降も NG が続く場合、同じく 10 回に一度 3G/LTE モジュールの電源オン・オフを実施します。 LTE モジュールが検出できない状態が 2 回連続で発生した場合、LTE モジュールの再起動を実施します。(Armadillo Base OS 3.18.5-at.7 以降) LTE 接続中状態が 3 回連続で発生した場合、LTE モジュールの再起動を実施します。(Armadillo Base OS 3.19.1-at.2 以降) 工場出荷状態で本サービスは有効化されており、システム起動時にサービスが自動的に開始されます。PING を実行する宛先は、初期設定では "8.8.8.8" です。 atmark-wwan-utils のバージョンが 1.5.0-r0 以降の場合は、設定ファイルは /etc/atmark/connection-recover.conf を使用します。 設定ファイルの記載例として、サンプルファイル(/etc/atmark/connection-recover.conf.example)がありますので、こちらをリネームまたはコピーしてご利用ください。 | |
|---|
atmark-wwan-utils 1.5.0-r0 (Armadillo Base OS 3.17.3-at.6) 以降、旧設定ファイル /etc/atmark/connection-recover/gsm-ttyUSB2_connection-recover.conf が存在する場合、/etc/atmark/connection-recover.conf よりも優先して設定ファイルとして使用します。 旧設定ファイルが不要である場合は、図6.200「再接続サービス 旧設定ファイルの削除」に示すとおりに削除してご利用ください。
|
設定ファイルの概要を表6.22「再接続サービス設定パラメーター」に示します。必要に応じて設定値を変更してください。 設定ファイルが存在しない場合は初期値で動作します。 表6.22 再接続サービス設定パラメーター | パラメーター名 | 初期値 | 意味 | 変更 |
|---|
PRODUCT_NAME | - | 製品名 | 不可 | CHECK_INTERVAL_SEC | 120 | 監視周期(秒) | 可 | PING_DEST_IP | 8.8.8.8 | コネクション状態確認時 PING 送付先 | 可 | DEVICE | - | ネットワークデバイス名 | 不可 | TYPE | - | ネットワークタイプ | 不可 | NETWORK_IF | - | ネットワーク I/F 名 | 不可 | FORCE_REBOOT | FALSE | TRUE に設定すると PING 導通チェックが 4 回連続 NG だった場合、 Armadillo を再起動します。 | 可 | REBOOT_IF_SIM_NOT_FOUND | FALSE | TRUE に設定すると SIM を検出できない状態が 2 回連続で発生した場合、 Armadillo を再起動します。 | 可 | WWAN_FORCE_RESTART_COUNT | 10 | PING 導通確認を設定した回数連続で失敗した場合LTE モジュールを再起動します。設定した回数に満たない場合 、電波のオフ・オン実施のみで 3G/LTE 再接続を試みます。 | 可 |
設定ファイル変更後、変更内容を永続化するには図6.201「3G/LTE 再接続サービスの設定値を永続化する」に示すコマンドを実行してください。 3G/LTE再接続サービスの状態を確認するには、図6.202「3G/LTE 再接続サービスの状態を確認する」に示すコマンドを実行してください。 3G/LTE再接続サービスを停止するには、図6.203「3G/LTE 再接続サービスを停止する」に示すコマンドを実行してください。 3G/LTE再接続サービスを開始するには、図6.204「3G/LTE 再接続サービスを開始する」に示すコマンドを実行してください。 独自に接続状態を確認するサービスを実装されるなどの理由で標準の3G/LTE再接続サービスが不要な場合、図6.205「3G/LTE 再接続サービスを無効にする」に示す手順で再接続サービスを永続的に無効にできます。 |
再接続サービスを停止します。
| |
再接続サービスを無効にします。
| |
サービス設定ファイルの削除を永続化します。
|
3G/LTE再接続サービスを無効化した後、再度有効にする場合、図6.206「3G/LTE 再接続サービスを有効にする」に示す手順を実行してください。 |
再接続サービスを有効にします。
| |
再接続サービスを開始します。
| |
サービス設定ファイルを永続化します。
|
6.15.7.11. ModemManager - mmcli についてここでは ModemManager と mmcli について説明します。 Armadillo-IoT ゲートウェイ G4 にはネットワークを管理する NetworkManager とは別に、モデムを管理する ModemManager がインストールされています。
ModemManager はモバイルブロードバンドデバイス(3G/LTEモジュールなど)の操作および、接続状況の管理などを行います。 ModemManager のコマンドラインツールである mmcli を使用することで、3G/LTE通信の電波強度やSIMカードの情報(電話番号やIMEIなど)を取得することが可能です。mmcli の詳しい使いかたについては man mmcli を参照してください。 6.15.7.13. mmcli - モデムの情報を取得するモデムの情報を取得するには、図6.208「モデムの情報を取得する」に示すコマンドを実行します。 | |
|---|
モデムの情報を取得するには、SIM カードが取り付けられている必要があります。正しく SIM カードが取り付けられていることを確認してください。 |
開放しているポートが存在すると攻撃者の標的になる可能性があります。
開発したサーバーが使用するポートに対して、アクセスできる IP アドレスを制限することでセキュリティ上のリスクを低減することができます。 ここでは、iptables コマンドを使用した、パケットフィルタリングによるアクセス制限方法を紹介します。 図6.211「特定のポートに対する IP アドレスのフィルタリング」の例では、Armadillo の特定のポートに対して、特定の IP アドレスからのアクセスのみを受け入れるようにします。
この例では、<送信元 IP アドレス> は Armadillo にパケットを送信する IP アドレス、<ポート番号> はパケットを受け入れる Armadillo のポート番号、<プロトコル> は通信プロトコルのことを指します。
また、<ポート番号> はパケットを受け入れる Armadillo のポート番号のことを指します。 |
<ポート番号> に <送信元 IP アドレス> から送られてきたパケットを受け入れるように設定します。
| |
<ポート番号> に <送信元 IP アドレス> 以外から送信されてきたパケットを拒否するように設定します。
| |
想定通りに設定されているか確認します。
| |
上記の設定を設定ファイル /etc/iptables/rules-save に保存します。
| |
保存した設定ファイルを永続化します。
|
図6.211「特定のポートに対する IP アドレスのフィルタリング」はあくまで一例ですが、このように iptables コマンドを用いることで開発したサーバーにアクセスできる IP アドレスを制限することができます。 上記の設定を削除する場合は図6.212「特定のポートに対する IP アドレスのフィルタリングの設定を削除」に示すコマンドを実行してください。 |
削除する設定の番号(num)を確認します。
ここでは 1 番と 2 番の設定を削除します。
| |
2 番の設定を削除します。
| |
1 番の設定を削除します。
| |
上記の設定を設定ファイル /etc/iptables/rules-save に保存します。
| |
保存した設定ファイルを永続化します。
|
6.16. コマンドラインから無線 LAN でネットワークを構成するこの章では、Armadillo-IoT ゲートウェイ G4 WLAN モデルに搭載されている
WLAN + BT コンボモジュールを使って様々なネットーワークを構成する例を紹介します。 なお、 ABOS Web を利用することで簡単に同様の設定を行うことが可能ですので、基本的には ABOS Web の使用を推奨します。
詳細は、「ネットワーク設定」を参照してください。 6.16.1. 無線 LAN アクセスポイント (AP) に接続するArmadillo-IoT ゲートウェイ G4 WLAN モデルを子機として、無線 LAN AP に
接続する方法を説明します。 以下は、WPA2-PSK(AES) の AP に接続する例です。
ここでは、AP の ESSID を [essid]、パスフレーズを [passphrase] と表記します。 |
設定ファイルを永続化することで、Armadillo 起動時に自動的に AP に接続するようになります。
|
nmtui というツールを使用するとテキストユーザーインターフェースで設定を行うことができます。 表示された画面上で設定が行なえます。 Activate a connection を選択します。 Wi-Fi (mlan0) の下に表示される AP 一覧の中から、接続したいものを選択します。 表示された画面で、接続のためのパスフレーズを入力します。 入力後に OK を押すと接続されます。 6.16.2. 無線 LAN アクセスポイント (AP) として設定するArmadillo-IoT ゲートウェイ G4 WLAN モデルを無線 LAN AP として設定する
方法を説明します。AP を設定するには hostapd というソフトウェアと、
DNS/DHCP サーバである dnsmasq というソフトウェアを使用します。 hostapd と dnsmasq は Armadillo Base OS にデフォルトでインストール済みとなっているため、
インストール作業は不要です。
インストールされていない場合は、 Armadillo Base OS を最新バージョンに更新してください。 | |
|---|
アクセスポイントモード (AP) と ステーションモード (STA) の同時利用はできません。
Armadillo-IoT ゲートウェイ G4 WLAN モデルを子機として無線 LAN AP に接続しながら、
hostapd を起動するような使い方は避けてください。 |
6.16.2.1. hostapd を使用して設定するNetworkManager で bridge インターフェース (br0) を追加します。
同時に IP アドレスも設定します。ここでは 192.168.1.1 を設定しています。 |
設定ファイルを永続化します。
|
また、NetworkManager のデフォルト状態では定期的に mlan0 のスキャンを行っています。
スキャン中は AP の性能が落ちてしまうため mlan0 を NetworkManager の管理から外します。 |
nmcli で NetworkManager をリスタートせずに設定します。
|
| |
|---|
hostapd が使用するインターフェース (uap0) は /etc/NetworkManager/conf.d/00_disable_ap.conf
ファイルによってデフォルトで NetworkManager の管理から外しております。 |
hostapd の設定ファイルの雛形として用意してある /etc/hostapd/hostapd.conf.example を
コピーして使用します。 |
5GHz であれば a を、2.4GHz であれば g を設定します。
| |
使用するチャンネルを設定します。
| |
子機から接続するための任意の SSID を設定します。この例では myap を設定しています。
| |
子機から接続するための任意のパスフレーズを設定します。この例では myap_pass を設定しています。
| |
設定ファイルを永続化します。
| |
hostapd を起動します。
| |
Armadillo 起動時に hostapd が自動的に起動されるようにします。
| 
|
hostapd 自動起動の設定を永続化します。
|
dnsmasq の設定ファイルを以下の内容で作成し /etc/dnsmasq.d/ 下に配置します。
ファイル名は任意ですが、拡張子は .conf としてください。ここでは dhcp.conf としています。 |
子機に割り当てる IP アドレスの範囲とリース期間を設定します。
| |
設定ファイルを永続化します。
| |
dnsmasq を再起動します。
|
hostapd と dnsmasq の起動完了後、子機から hostapd.conf で設定した SSID とパスフレーズで接続できます。 Armadillo-IoT ゲートウェイ G4 WLAN モデルをルータとして設定して外部ネットワークに接続する
方法を説明します。ここでは外部ネットワークの例として一般的なインターネットを設定しています。 6.16.3.1. 無線 LAN 側に接続した機器から Ethernet 経由でインターネットに接続するArmadillo-IoT ゲートウェイ G4 WLAN モデルを無線 LAN AP として設定し、
AP に接続した子機から、 Ethernet(eth0/eth1) を経由してインターネットに接続する方法を説明します。 最初に、「無線 LAN アクセスポイント (AP) として設定する」 を参照して AP の設定を完了させてください。 ルータとして機能させるために、 ip_forward を有効にします。
sysctl の設定ファイルを以下の内容で作成し /etc/sysctl.d/ 下に配置します。
ファイル名は任意ですが、拡張子は .conf としてください。ここでは router.conf としています。 |
1 (有効) に設定します。
| |
設定ファイルを永続化します。
| |
sysctl を再起動して設定を反映させます。
|
|
ここで設定する IP アドレスのネットワーク部は AP に設定したものと合わせてください。
| |
iptables の設定を保存します。
| |
サービスを有効にします
| |
保存した設定ファイルを永続化します。
|
設定完了後、AP を起動して子機を接続すると子機からインターネットに接続することができます。
経由する Ethernet インターフェースを eth1 としたい場合は、 iptables の設定時に -o eth1 としてください。 6.16.3.2. Ethernet 側に接続した機器から無線 LAN 経由でインターネットに接続するArmadillo-IoT ゲートウェイ G4 WLAN モデルの Ethernet(eth0/eth1) に接続した機器から、
無線 LAN を経由してインターネットに接続する方法を説明します。 図6.219「ip_forward を有効にする」 と同様の手順で設定します。 -
bridge インターフェースを追加して eth0 と eth1 を割り当てる
|
デフォルトで存在しているコネクションを down します。
| |
bridge インターフェースを作成します。
| |
作成した bridge-br0 に任意の IP アドレスを設定し STP を無効にします。
| |
eth0 を bridge-br0 に割り当てます。
| |
eth1 を bridge-br0 に割り当てます。
| |
それぞれの設定ファイルを永続化します。
|
dnsmasq の設定ファイルを以下の内容で作成し /etc/dnsmasq.d/ 下に配置します。
ファイル名は任意ですが、拡張子は .conf としてください。ここでは dhcp.conf としています。 |
接続した機器に割り当てる IP アドレスの範囲とリース期間を設定します。
| |
dnsmasq を再起動します。
|
|
ここで設定する IP アドレスのネットワーク部は bridge-br0 に設定したものと合わせてください。
| |
iptables の設定を保存します。
| |
サービスを有効にします
| |
保存した設定ファイルを永続化します。
|
「無線 LAN アクセスポイント (AP) に接続する」 と同様の手順で、無線 LAN アクセスポイントに接続します。 設定完了後、eth0/eth1 ポートに機器を接続すると無線 LAN 経由でインターネットに接続することができます。 ここでは、microSDHC カードを接続した場合を例にストレージの使用方法を説明します。
以降の説明では、共通の操作が可能な場合に、microSD/microSDHC/microSDXCカードを microSD カードと表記します。 Linux では、アクセス可能なファイルやディレクトリは、一つの木構造にまとめられています。あるストレージデバイスのファイルシステムを、
この木構造に追加することを、マウントするといいます。マウントを行うコマンドは、 mount です。 mount コマンドの典型的なフォーマットは、次の通りです。
-t オプションに続く fstype には、ファイルシステムタイプを指定します。ファイルシステムタイプの指定は省略可能です。
省略した場合、mount コマンドはファイルシステムタイプを推測します。この推測は必ずしも適切なものとは限りませんので、
事前にファイルシステムタイプが分かっている場合は明示的に指定してください。
FAT32 ファイルシステムの場合は vfat 、EXT3 ファイルシステムの場合は ext3 を指定します。
| |
|---|
通常、購入したばかりの microSDHC カードは FAT32 または exFAT ファイルシステムでフォーマットされています。 |
device には、ストレージデバイスのデバイスファイル名を指定します。microSD カードのパーティション1の場合は /dev/mmcblk1p1 、
パーティション2の場合は /dev/mmcblk1p2 となります。
dir には、ストレージデバイスのファイルシステムをマウントするディレクトリを指定します。
SD インターフェース (CON1) に microSD カードを挿入し、以下に示すコマンドを実行すると、
/mnt ディレクトリに microSD カードのファイルシステムをマウントすることができます。
microSDカード内のファイルは、/mnt ディレクトリ以下に見えるようになります。 ストレージを安全に取り外すには、アンマウントという作業が必要です。アンマウントを行うコマンドは、 umount です。
オプションとして、アンマウントしたいデバイスがマウントされているディレクトリを指定します。 6.17.3. ストレージのパーティション変更とフォーマット通常、購入したばかりの microSD カードや USB メモリは、一つのパーティションを持ち、FAT32ファイルシステムでフォーマットされています。 パーティション構成を変更したい場合、 fdisk コマンドを使用します。 fdisk コマンドの使用例として、
一つのパーティションで構成されている microSD カードのパーティションを、2つに分割する例を図6.227「fdiskコマンドによるパーティション変更」に示します。
一度、既存のパーティションを削除してから、新たにプライマリパーティションを二つ作成しています。先頭のパーティションには 100MByte、
二つめのパーティションに残りの容量を割り当てています。先頭のパーティションは /dev/mmcblk1p1 、二つめは /dev/mmcblk1p2 となります。 FAT32 ファイルシステムでストレージデバイスをフォーマットするには、 mkfs.vfat コマンドを使用します。
また、EXT2 や EXT3、EXT4 ファイルシステムでフォーマットするには、mkfs.ext2 や mkfs.ext3 、
mkfs.ext4 コマンドを使用します。
microSD カードのパーティション1を EXT4 ファイルシステムでフォーマットするコマンド例を次に示します buttond サービスを使用することで、ボタンやキー入力をトリガーとする処理を簡単に実装できます。
デフォルトでは 表3.6「CON12 信号配列」 にある PWR_OFF と REBOOT を3秒以上押している(プルダウンしている)場合に poweroff か reboot を
実行します。 /etc/atmark/buttond.conf に BUTTOND_ARGS を上書きすればその対応を無効にすることもできますし、
別のキー(SW1 など)の対応も追加できます:
以下にデフォルトを維持したままで SW1 の短押しと長押しのそれぞれの場合にコマンドを実行させる例を示します。 |
buttond の設定ファイルを編集します。この例では、短押しの場合 /tmp/shotpress に、5 秒以上の長押しの場合 /tmp/longpress に日付を出力します。
| |
設定ファイルを保存します。
| |
buttond サービスを再起動させます。ここでは再起動後短押しを 2 回、長押しを 1 回行ったとします。
| |
押された回数を確認します。
|
USB キーボードや他の入力デバイスにも対応できます。
デバイスを接続してから、 buttond でデバイス名とキーコードを確認します。
|
buttond を -vvv で冗長出力にして、すべてのデバイスを指定します。
| |
希望のキーを押すと、LEFTCTRL が三つのパスで認識されました。 一番安定する by-id のパスを控えておきます。
|
USB デバイスを外すこともありますので、-i (inotify) で管理されてる入力デバイスとして追加します。
そうしないとデバイスを外したときにbuttondが停止します。
6.18.3. Armadillo 起動時にのみボタンに反応する方法Armadillo 起動時にのみ、例として SW1 の長押しに反応する方法を紹介します。 /etc/local.d/boot_switch.start に稼働期間を指定した buttond を起動させる設定を記載します。
buttond が起動してから 10秒以内に SW1 を一秒以上長押しすると myapp のコンテナの親プロセスに USR1 信号を送ります(アプリケーション側で信号を受信して、デバッグモードなどに切り替える想定です)。
SW1 が Armadillo 起動前に押された場合は、buttond の起動一秒後に実行されます。 |
SW1 の入力を /dev/input/by-path/platform-gpio-keys-event ファイルの PROG1 として認識できます。
| |
buttond 起動後 10 秒経過すると終了します。
| |
SW1 を一度検知した後すぐに終了します。
| |
サービスとして動作させる必要がないため & を付けてバックグラウンド起動します。
|
6.19. 動作中の Armadillo の温度を測定するこの章では、Armadillo Base OS 搭載製品を組み込んだユーザー製品の熱設計時に役立つ温度プロファイラツールである「atmark-thermal-profiler」について紹介します。 Armadillo は製品ごとに動作温度範囲が設定されていますが、それらはあくまでも標準筐体に放熱材と共に取り付けて使用した場合の目安であり、実運用時には自作の筐体の使用や放熱の有無などで記載のスペック通りにならない場合があります。
また、 Armadillo には CPU または SoC が特定の温度以上になると、自動的にシャットダウンするサーマルシャットダウン機能が搭載されています。
そのため、現実的には Armadillo を組み込んだ製品を運用時と同等の環境で動作させつつ、実際に温度を計測して実運用時の CPU 及び SoC 温度がどの程度まで上がるか、サーマルシャットダウンは起こらないかを確かめる必要があります。 Armadillo Base OS 搭載製品では、動作中の Armadillo の各種温度等を取得しCSV形式で出力する atmark-thermal-profiler を利用することができますので、温度測定に役立てることができます。 6.19.2. atmark-thermal-profiler をインストールするatmark-thermal-profiler は apk パッケージで公開されていますので、apk add コマンドでインストールすることが可能です。 | |
|---|
atmark-thermal-profiler はデバッグ(開発)用途で温度情報を収集及び解析するツールです。
atmark-thermal-profiler は、他の apk パッケージと同様に persist_file -a コマンドで永続的にインストールしておくことが可能ですが、
ログの保存のために Armadillo が起動している間 eMMC への書き込みを続けるので、 Armadillo を組み込んだ製品の運用時に動かしたままにしておくことは推奨しません。 atmark-thermal-profiler を永続的にインストールする場合は、運用時には必ず削除してください。 |
6.19.4. atmark-thermal-profiler が出力するログファイルを確認するatmark-thermal-profiler は、インストール直後から自動的に温度やCPU負荷率、Load Averageなどの情報を30秒に1度の周期で集め、/var/log/thermal_profile.csvに追記していきます。 thermal_profile.csv の1行目はヘッダ行です。
各列についての説明を表6.23「thermal_profile.csvの各列の説明」に記載します。 表6.23 thermal_profile.csvの各列の説明 | ヘッダ | 説明 |
|---|
DATE | その行のデータ取得日時です。 "年-月-日T時:分:秒+タイムゾーン" の形式で出力されます。 | ONESHOT | この列が1の行のデータは、サーマルシャットダウンを含むシャットダウンが実行された時に取得されたことを示します。 | CPU_TEMP | 計測時点の CPU 温度を示します。単位は℃です。 | SOC_TEMP | 計測時点の SoC 温度を示します。単位は℃です。製品よっては非対応で、その場合は空白になります。 | LOAD_AVE | 計測時点から直近1分間のLoad Averageです。 | CPU_1 | 計測時点のCPU使用率1位のプロセスです。 | CPU_2 | 計測時点のCPU使用率2位のプロセスです。 | CPU_3 | 計測時点のCPU使用率3位のプロセスです。 | CPU_4 | 計測時点のCPU使用率4位のプロセスです。 | CPU_5 | 計測時点のCPU使用率5位のプロセスです。 | USE_1 | 計測時点のCPU使用率1位のプロセスのCPU使用率です。 | USE_2 | 計測時点のCPU使用率2位のプロセスのCPU使用率です。 | USE_3 | 計測時点のCPU使用率3位のプロセスのCPU使用率です。 | USE_4 | 計測時点のCPU使用率4位のプロセスのCPU使用率です。 | USE_5 | 計測時点のCPU使用率5位のプロセスのCPU使用率です。 |
atmark-thermal-profiler を使用して得られたログファイルの内容を分析してみます。 6.19.5.1. サーマルシャットダウン温度の確認予め、使用している Armadillo が何℃でサーマルシャットダウンするか確認しておきます。
ここでは、 Armadillo Base OS を搭載している Armadillo-IoT ゲートウェイ G4 を例とします。
他の製品では得られる結果が異なる場合があることに注意してください。 |
CPU のサーマルシャットダウン温度です。ミリ℃で表記されているので、105℃でサーマルシャットダウンすることがわかります。
| |
SoC のサーマルシャットダウン温度です。ミリ℃で表記されているので、105℃でサーマルシャットダウンすることがわかります。
|
atmark-thermal-profiler が出力するログ(thermal_profile.csv)はCSVファイルなので、各種表計算ソフトでインポートしてグラフ化することが可能です。
これにより Armadillo 動作中の温度の変化が可視化され、得られる情報が見やすくなります。 図6.238「Armadillo-IoT ゲートウェイ G4で取得した温度のグラフ」は Armadillo-IoT ゲートウェイ G4上で一定期間 atmark-thermal-profiler を実行して取得した thermal_profile.csv を Google スプレッドシートでグラフ化したものです。
例のために、途中で stress-ng コマンドを実行して CPU に負荷を与えた後、 stress-ng コマンドを停止して CPU と SoC の温度が下がるのを待った際のデータです。 グラフの縦軸は温度(℃)で、横軸は時間です。青い線は CPU の温度、赤い線は SoC の温度を表しています。
このグラフと、「サーマルシャットダウン温度の確認」で得たサーマルシャットダウン温度を見比べると、 CPU に負荷をかけた際であっても SoC の温度は 60℃ 前後ほどまでしか上がらず、 この条件で動く Armadillo が温度的にどれほど余裕を持っているかをひと目で確認できます。 atmark-thermal-profiler は、時間毎の温度だけでなく CPU 使用率と CPU 使用率の高いプロセスについても取得して記録します。
CPU 使用率については thermal_profile.csv の CPU_1〜CPU_5 列と、 USE_1〜USE_5 列を参照してください。
各列について詳しくは表6.23「thermal_profile.csvの各列の説明」にまとまっています。 一般的に CPU 使用率が高くなると、 CPU 周辺の温度も高くなります。
そのため、測定した温度が高い場合は、 CPU 使用率の高いプロセスに注目して、 CPU を無駄に使用している意図しない処理が行なわれていないかなどを確認することをおすすめします。 Armadillo-IoT ゲートウェイ G4の温度センサーは、i.MX 8M PlusのTMU(Thermal Monitoring Unit)を利用しています。CPU(Arm Cortex-A53)周辺温度と、SoC(ANAMIX内部)温度を測定することができます。 起動直後の設定では、ARMまたはSoCの測定温度が 105°C以上になった場合、Linuxカーネルはシステムを停止します。 -
機能
-
sysfs thermalクラスディレクトリ
-
/sys/class/thermal/thermal_zone0 (CPU)
-
/sys/class/thermal/thermal_zone1 (SoC)
6.20. Armadillo Base OS をアップデートするArmadillo Base OS は SWUpdate によってアップデートすることができます。 アップデートする際には、rootfs ファイルシステムにインストールされたファイルをすべて消して、アップデートの中身と /etc/swupdate_preserve_files に記載されているファイルで新しい rootfs を作ります。「swupdate_preserve_files について」 を参照してください。 アップデートでファイルを削除してしまった場合に abos-ctrl mount-old で前のシステムを read-only でマウントして、
削除されたファイルをコピーすることもできます。 Armadillo Base OS のルートファイルシステムが破損し起動できなくなった場合、自動的に以前のバージョンで再起動します。 abos-ctrl status コマンドでロールバックされてるかどうかを確認できます。
表6.24 rollback-status の出力と意味 | 出力 | 説明 |
|---|
OK
| ロールバックされていません。 | rolled back
| ロールバックされています。 |
表6.25 rollback-status 追加情報の出力と意味 | 出力 | 説明 |
|---|
no fallback (fresh install)
| 初期化状態。 | no fallback
| 何かの理由でB面が起動できない状態になっています(アップデート失敗後等)。 | auto-rollback enabled (post-update)
| アップデート直後でまだ再起動していない状態です。再起動して失敗した場合にロールバックが発生します。 | auto-rollback enabled (cloned)
| abos-ctrl rollback-clone コマンドを実行した後の状態です。同じくロールバック可能です。
| available, no auto-rollback
| アップデートの後に正常に起動できたので、自動ロールバックが無効になっていますが abos-ctrl rollback --allow-downgrade コマンドで手動ロールバック可能です。 |
| |
|---|
Armadillo Base OS 3.19.1-at.4 以下のバージョンでは「アップデート直後」の概念がなかったため、ステータスは「no fallback」(B面がない状態)、
「optimal」(ロールバック可能)、と「rolled back」の3択だけでした。 |
必要な場合(例えば、自分のアプリケーションがアップデート直後に問題があった場合)、 abos-ctrl rollback で手動のロールバックも可能です。ロールバックにエラーがなければ、再起動してロールバックを完了します。 なお、/var/at-log/atlog に切り替えの際に必ずログを書きますので、調査の時に使ってください。
以下の例では、Armadillo Base OS を更新した後に起動できないカーネルをインストールして、起動できなかったためにロールバックされました。 6.22. Armadillo 起動時にコンテナの外でスクリプトを実行する起動時に何かスクリプトを走らせるためにはコンテナとして実行することを推奨します。 「コンテナ起動設定ファイルを作成する」 を参照してください。 コンテナで実行不可能な場合に、「local」サービスを使うことができます: /etc/local.d ディレクトリに
.start ファイルを置いておくと起動時に実行されて、 .stop ファイルは終了時に実行されます。 |
スクリプトを作ります。
| |
スクリプトを実行可能にします。
| |
スクリプトを保存して、再起動します。
| |
実行されたことを確認します。
|
u-boot の環境変数を変更するには /boot/uboot_env.d/ ディレクトリに環境変数が書かれた設定ファイルを配置します。 ファイルの構文は fw_setenv が扱うことができるもので、以下のとおりです: -
# で始まる行はコメントと扱われる為、無視されます。また、 環境変数への代入を示す = がない場合も無視されます。
-
[変数]=[値] で変数を設定します。スペースや引用符を含め他の文字は有効ですので、変数の名前と値に不要な文字を入れないように注意してください。
-
[変数]= で変数を消します。値がない場合に変数が消去されます。
このファイルによるアップデート内容は swupdate でアップデートする際に適用されます。 実行中のシステムに影響がありませんので、設定ファイルを swupdate で転送しない場合はファイル永続化後に fw_setenv -s /boot/uboot_env.d/[ファイル名] で変数を書き込んでください。 swupdate でファイルを転送した場合には、変数はすぐに利用されます。 |
コンフィグファイルを生成します。
| |
ファイルを永続化します。
| |
変数を書き込みます。
| |
書き込んだ変数を確認します。
|
| |
|---|
mkswu バージョン 4.4 以降が必要です。必要な場合はアップデートしてください。 [ATDE ~]$ sudo apt update && sudo apt upgrade 書き方は、 /usr/share/mkswu/examples/uboot_env.desc を参考にしてください。 |
| |
|---|
「ブートローダーをビルドする」 の際に u-boot のデフォルトを変更した場合や、u-boot のプロンプトで「setenv」や「saveenv」を実行しても、 /boot/uboot_env.d/00_defaults によって変更がアップデートの際にリセットされます。 00_defaults のファイルは Base OS の一部で更新されることもありますので、変更を望む場合は別のファイルを作って設定してください。
ファイルはアルファベット順で処理されます。 00_defaults にある変数を後のファイルにも設定した場合はそのファイルの値だけが残ります。
|
主要なu-bootの環境変数を以下に示します。 表6.26 u-bootの主要な環境変数 | 環境変数 | 説明 | デフォルト値 |
|---|
console | コンソールのデバイスノードと、UARTのボーレート等を指定します。 | ttymxc1,115200 | bootcount | 起動回数を示します。初回起動時に1となり、起動に失敗する度にインクリメントされます。ユーザーランドのreset_bootcountサービスが起動されると、この値はクリアされます。この値が"bootlimit"を越えた場合はロールバックします。ロールバックの詳細については、「ロールバック(リカバリー)」を参照してください。 | 1 | bootlimit | "bootcount"のロールバックを行うしきい値を指定します。 | 3 | upgrade_available | 1以上の場合は bootcount を管理してロールバック可能になります。0 か空の場合はロールバックできません。値を abos-ctrl status で確認できます。 | 状況による | bootdelay | 保守モードに遷移するためのキー入力を待つ時間を指定します(単位:秒)。次の値は特別な意味を持ちます。
-
-1: キー入力の有無に関らず保守モードに遷移します。
-
-2: キー入力の有無に関らず保守モードに遷移しません。
| 2 | image | Linuxカーネルイメージファイルのパスです。"mmcdev"で指定されたデバイスの、"mmcpart"で指定されたパーティションのルートディレクトリからの相対パスで指定します。 | boot/Image | fdt_file | DTBファイルのパスです。"mmcdev"で指定されたデバイスの、"mmcpart"で指定されたパーティションのルートディレクトリからの相対パスで指定します。 | boot/armadillo.dtb | overlays_list | DT overlayの設定ファイルのパスです。"mmcdev"で指定されたデバイスの、"mmcpart"で指定されたパーティションのルートディレクトリからの相対パスで指定します。DT overlayの詳細については、「DT overlay によるカスタマイズ」を参照してください。 | boot/overlays.txt | mmcautodetect | mmcデバイスの自動検出機能の有効/無効を指定します。yesを指定した場合のみ、u-bootが起動されたmmcデバイスが自動的にmmcdevとして利用されます。 | yes | mmcdev | "image"や"fdt_file"で指定されたファイルが配置してあるmmcデバイスのインデックスを指定します。インデックスとmmcデバイスの対応は次の通りです。
-
1: microSD/microSDHC/microSDXC カード
-
2: eMMC
"mmcautodetect"にyesが指定されている場合は、u-bootの起動時に上書きされます。 | 2 | mmcpart | "image"や"fdt_file"で指定されたファイルが配置してある、"mmcdev"で指定されたmmcデバイスのパーティション番号を指定します。"mmcautodetect"にyesが指定されている場合は、u-bootの起動時に上書きされます。 | 1 | mmcroot | ルートファイルシステムが配置されているデバイスノードと、マウントオプションを指定します。"mmcautodetect"にyesが指定されている場合は、u-bootの起動時に上書きされます。overlayfsが正しく機能しなくなる場合があるので、roの指定は変更しないでください。 | /dev/mmcblk2p1 rootwait ro | optargs | Linuxカーネル起動時パラメータを指定します。"quiet"を削除すると、コンソールに起動ログが出力されるようになりますが、起動時間が長くなります。
nokaslrを削除すると、KASLR(Kernel Adress Space Layout Randomization)が有効となり、Linuxカーネルの仮想アドレス空間がランダム化されます。 | quiet nokaslr | loadaddr | LinuxカーネルがRAMにロードされる物理アドレスを指定します。 | 0x40480000 | fdt_addr | DTBがRAMにロードされる物理アドレスを指定します。 | 0x45000000 | overlay_addr | DT overlayのワーク領域として利用されるRAMの物理アドレスを指定します。 | 0x45020000 |
6.23.1. u-boot の環境変数の変更を制限するu-boot のソースに含まれる imx-boot-[VERSION]/uboot-imx/configs/x2_defconfig に
CONFIG_ENV_WRITEABLE_LIST=y を追加すると、変更可能と明示したもの以外の環境変数を変更不可にすることができます。
変更可能とする環境変数のリストは imx-boot-[VERSION]/uboot-imx/include/configs/armadillo_x2.h ファイルの
CFG_ENV_FLAGS_LIST_STATIC で設定します。 デフォルトのコンフィグでは、以下の環境変数が変更可能です: -
upgrade_available と bootcount: ロールバック機能に必要な変数です。ロールバック機能を無効に
する場合は必ず upgrade_available のデフォルト値も空にしてください。
-
ethaddr, eth1addr, ethact と ethprime: ネットワークコマンド関連の変数です。デフォルトのブー
トコマンドはネットワークを使用してませんので動作に影響ありません。
u-boot のソースの取得方法、ビルド方法およびインストール方法については 「ブートローダーをビルドする」 を参照してください。
ビルドしたものをインストールすると CFG_ENV_FLAGS_LIST_STATIC で設定した環境変数以外は変更できなくなります。 本章では、microSDカードから直接起動(以降「SDブート」と表記します)する手順を示します。
SDブートを活用すると、microSDカードを取り替えることでシステムイメージを変更することができます。
本章に示す手順を実行するためには、容量が8Gbyte以上のmicroSDカードを必要とします。 | |
|---|
SDブートを行った場合、ブートローダーの設定は microSDカード に保存されます。 |
ブートディスクイメージをビルドします
「Alpine Linux ルートファイルシステムをビルドする」 で説明されているソースツリー alpine/build-rootfs にあるスクリプト build_image と 「ブートローダーをビルドする」 でビルドした imx-boot_armadillo_x2 を利用します。 VPU や NPU も使用する場合は、 「VPU や NPU を使用する」 で用意した imx_lib.img も組み込めます。 [PC ~/build-rootfs-[VERSION]]$ sudo ./build_image.sh \
--boot ~/imx-boot-[VERSION]/imx-boot_armadillo_x2 \
--firmware ~/at-imxlibpackage/imx_lib.img
: (省略)
[PC ~/build-rootfs-[VERSION]]$ ls baseos-x2*img
baseos-x2-[VERSION].img-
ATDE に microSD カードを接続します。詳しくは「取り外し可能デバイスの使用」を参考にしてください。
microSD カードのデバイス名を確認します
[ATDE ~]$ ls /dev/sd?
/dev/sda /dev/sdb
[ATDE ~]$ sudo fdisk -l /dev/sdb
Disk /dev/sdb: 7.22 GiB, 7751073792 bytes, 15138816 sectors
Disk model: SD/MMC
: (省略)
microSD カードがマウントされている場合、アンマウントします。
ブートディスクイメージの書き込み
[PC ~]$ sudo dd if=~/build-rootfs-[VERSION]/baseos-x2-[VERSION].img \
of=/dev/sdb bs=1M oflag=direct status=progressmicroSDカードの性能にもよりますが、書き込みには5分程度かかります。
| |
|---|
microSDカードのパーティション構成は次のようになっています。 表6.27 microSDカードのパーティション構成 | パーティション | オフセット | サイズ | 説明 |
|---|
- | 0 | 10MiB | ブートローダー | 1 | 10MiB | 300MiB | A/B アップデートのA面パーティション | 2 | 310MiB | 300MiB | A/B アップデートのB面パーティション | 3 | 610MiB | 50MiB | ログ用パーティション | 4 | 660MiB | 200MiB | ファームウェア | 5 | 860MiB | 残り | アプリケーション用パーティション |
gdiskで確認すると次のようになります。 [PC ~]$ sudo gdisk -l /dev/mmcblk1
GPT fdisk (gdisk) version 1.0.8
Partition table scan:
MBR: protective
BSD: not present
APM: not present
GPT: present
Found valid GPT with protective MBR; using GPT.
Disk /dev/mmcblk1: 15319040 sectors, 7.3 GiB
Sector size (logical/physical): 512/512 bytes
Disk identifier (GUID): 309AD967-470D-4FB2-835E-7963578102A4
Partition table holds up to 128 entries
Main partition table begins at sector 2 and ends at sector 33
First usable sector is 34, last usable sector is 15319006
Partitions will be aligned on 2048-sector boundaries
Total free space is 20446 sectors (10.0 MiB)
Number Start (sector) End (sector) Size Code Name
1 20480 634879 300.0 MiB 8300 rootfs_0
2 634880 1249279 300.0 MiB 8300 rootfs_1
3 1249280 1351679 50.0 MiB 8300 logs
4 1351680 1761279 200.0 MiB 8300 firm
5 1761280 15319006 6.5 GiB 8300 app |
「ブートディスクの作成」で作成したブートディスクから起動する方法を説明します。 -
Armadillo-IoT ゲートウェイ G4に電源を投入する前に、ブートディスクをCON1(SD インターフェース)に挿入します。
また、JP1ジャンパーをショート(SDブートに設定)します。
電源を投入します。
U-Boot SPL 2020.04-at7 (May 21 2022 - 11:21:55 +0900)
rv8803 rtc woken by interrupt
DDRINFO: start DRAM init
DDRINFO: DRAM rate 4000MTS
DDRINFO:ddrphy calibration done
DDRINFO: ddrmix config done
Normal Boot
Trying to boot from BOOTROM
image offset 0x8000, pagesize 0x200, ivt offset 0x0
NOTICE: BL31: v2.4(release):lf-5.10.y-1.0.0-0-gba76d337e956
NOTICE: BL31: Built : 11:08:22, Apr 6 2022
U-Boot 2020.04-at7 (May 21 2022 - 11:21:55 +0900)
CPU: i.MX8MP[8] rev1.1 1600 MHz (running at 1200 MHz)
CPU: Industrial temperature grade (-40C to 105C) at 40C
Model: Atmark-Techno Armadillo X2 Series
DRAM: Hold key pressed for tests: t (fast) / T (slow)
2 GiB
WDT: Started with servicing (10s timeout)
MMC: FSL_SDHC: 1, FSL_SDHC: 2
Loading Environment from MMC... OK
In: serial
Out: serial
Err: serial
BuildInfo:
- ATF
- U-Boot 2020.04-at7
first boot since power on
switch to partitions #0, OK
mmc1 is current device
flash target is MMC:1
Net: eth0: ethernet@30be0000 [PRIME], eth1: ethernet@30bf0000
Fastboot: Normal
Saving Environment to MMC... Writing to MMC(1)... OK
Normal Boot
Hit any key to stop autoboot: 0
u-boot=>
ブートディスク上のLinuxカーネルを起動します。
u-boot=> boot
6.25. Armadilloのソフトウェアをビルドするここでは、Armadillo-IoT ゲートウェイ G4で使用するソフトウェアのビルド方法を説明します。 ここでは、Armadillo-IoT ゲートウェイ G4向けのブートローダーイメージをビルドする方法を説明します。
ブートローダーのビルドに必要なパッケージのインストール
次のコマンドを実行します。 [ATDE ~]$ sudo apt install build-essential git wget gcc-aarch64-linux-gnu libgcc-*-dev-arm64-cross bison flex zlib1g-dev bash python3-pycryptodome python3-pyelftools device-tree-compiler
ソースコードの取得
Armadillo-IoT ゲートウェイ G4 ブートローダー から
「ブートローダー ソース」ファイル (imx-boot-[VERSION].tar.gz) を次のようにダウンロードします。 [ATDE ~]$ wget https://download.atmark-techno.com/armadillo-iot-g4/bootloader/imx-boot-[VERSION].tar.gz
[ATDE ~]$ tar xf imx-boot-[VERSION].tar.gz
[ATDE ~]$ cd imx-boot-[VERSION]
ビルド
次のコマンドを実行します。 [ATDE ~/imx-boot-[VERSION]]$ make imx-boot_armadillo_x2
:
: (省略)
:
Second Loader IMAGE:
sld_header_off 0x58000
sld_csf_off 0x59020
sld hab block: 0x401fcdc0 0x58000 0x1020
make[1]: ディレクトリ '/home/atmark/imx-boot-[VERSION]/imx-mkimage' から出ます
cp imx-mkimage/iMX8M/flash.bin imx-boot_armadillo_x2 初めてのビルドの場合、i.MX 8M Plusに必要なファームウェアの EULA
への同意を求められます。
内容を確認の上、同意してご利用ください。[] Welcome to NXP firmware-imx-8.11.bin
You need to read and accept the EULA before you can continue.
LA_OPT_NXP_Software_License v19 February 2021
:
: (省略)
:
Do you accept the EULA you just read? (y/N)
インストール
ビルドしたブートローダーは、以下に示すどちらかの方法でインストールしてください。
swupdate でインストールする
mkswu の初期化を行った後に 提供されているスクリプトを使ってSWUイメージを作成してください。 [ATDE ~/imx-boot-[VERSION]]$ echo 'swdesc_boot imx-boot_armadillo_x2' > boot.desc
[ATDE ~/imx-boot-[VERSION]]$ mkswu boot.desc
boot.swu を作成しました。 作成された boot.swu のインストールについては 「SWU イメージのインストール」 を参照ください。
「ブートディスクの作成」 でインストールする
手順を参考にして、ビルドされた imx-boot_armadillo_x2 を使ってください。
ここでは、Armadillo-IoT ゲートウェイ G4向けのLinuxカーネルイメージをビルドする方法を説明します。 | |
|---|
Armadillo-IoT ゲートウェイ G4では、
基本的にはLinuxカーネルイメージをビルドする必要はありません。
「Alpine Linux ルートファイルシステムをビルドする」の手順を実施することで、
標準のLinuxカーネルイメージがルートファイルシステムに組み込まれます。 標準のLinuxカーネルイメージは、アットマークテクノが提供する
linux-at というAlpine Linux用のパッケージに含まれています。 カスタマイズしたLinuxカーネルイメージを利用する場合は、
以下に示す手順を参照してください。 |
Linuxカーネルのビルドに必要なパッケージのインストール
次のコマンドを実行します。 [ATDE ~]$ sudo apt update
[ATDE ~]$ sudo apt install crossbuild-essential-arm64 bison flex python3-pycryptodome python3-pyelftools zlib1g-dev libssl-dev bc firmware-misc-nonfree wireless-regdb atmark-firmware
ソースコードの取得
Armadillo-IoT ゲートウェイ G4 Linuxカーネル から
「Linuxカーネル」ファイル (linux-at-x2-[VERSION].tar) をダウンロードして、次のコマンドを実行します。 [ATDE ~]$ tar xf linux-at-x2-[VERSION].tar
[ATDE ~]$ tar xf linux-at-x2-[VERSION]/linux-[VERSION].tar.gz
[ATDE ~]$ cd linux-[VERSION]
デフォルトコンフィギュレーションの適用
次のコマンドを実行します。 [ATDE ~/linux-[VERSION]]$ make ARCH=arm64 CROSS_COMPILE=aarch64-linux-gnu- x2_defconfig
カーネルコンフィギュレーションの変更
次のコマンドを実行します。
カーネルコンフィギュレーションの変更を行わない場合はこの手順は不要です。 [ATDE ~/linux-[VERSION]]$ make ARCH=arm64 CROSS_COMPILE=aarch64-linux-gnu- menuconfig コマンドを実行するとカーネルコンフィギュレーション設定画面が表示されます。
カーネルコンフィギュレーションを変更後、"Exit"を選択して
「Do you wish to save your new kernel configuration? (Press <ESC><ESC> to continue kernel configuration.)」で"Yes"とし、
カーネルコンフィギュレーションを確定します。 .config - Linux/arm64 5.10.86 Kernel Configuration
─────────────────────────────────────────────
┌────────── Linux/arm64 5.10.86 Kernel Configuration ───────────┐
│ Arrow keys navigate the menu. <Enter> selects submenus ---> (or empty submenus │
│ ----). Highlighted letters are hotkeys. Pressing <Y> includes, <N> excludes, <M>│
│ modularizes features. Press <Esc><Esc> to exit, <?> for Help, </> for Search. │
│ Legend: [*] built-in [ ] excluded <M> module < > module capable │
│ ┌───────────────────────────────────────┐ │
│ │ General setup ---> │ │
│ │ [*] Support DMA zone │ │
│ │ [*] Support DMA32 zone │ │
│ │ Platform selection ---> │ │
│ │ Kernel Features ---> │ │
│ │ Boot options ---> │ │
│ │ Power management options ---> │ │
│ │ CPU Power Management ---> │ │
│ │ Firmware Drivers ---> │ │
│ │ [ ] Virtualization ---- │ │
│ │ -*- ARM64 Accelerated Cryptographic Algorithms ---> │ │
│ │ General architecture-dependent options ---> │ │
│ │ [*] Enable loadable module support ---> │ │
│ │ [*] Enable the block layer ---> │ │
│ │ IO Schedulers ---> │ │
│ │ Executable file formats ---> │ │
│ │ Memory Management options ---> │ │
│ │ [*] Networking support ---> │ │
│ │ Device Drivers ---> │ │
│ │ File systems ---> │ │
│ │ Security options ---> │ │
│ │ -*- Cryptographic API ---> │ │
│ │ Library routines ---> │ │
│ │ Kernel hacking ---> │ │
│ │ │ │
│ └───────────────────────────────────────┘ │
├──────────────────────────────────────────┤
│ <Select> < Exit > < Help > < Save > < Load > │
└──────────────────────────────────────────┘ | |
|---|
Linux Kernel Configuration メニューで"/"キーを押下すると、カーネルコンフィギュレーションの検索を行うことができます。
カーネルコンフィギュレーションのシンボル名(の一部)を入力して"Ok"を選択すると、
部分一致するシンボル名を持つカーネルコンフィギュレーションの情報が一覧されます。 |
ビルド
次のコマンドを実行します。 [ATDE ~/linux-[VERSION]]$ make ARCH=arm64 CROSS_COMPILE=aarch64-linux-gnu- -j5
インストール
ビルドしたカーネルは、以下に示すどちらかの方法でインストールしてください。
swupdate でインストールする
mkswu の初期化を行った後に 提供されているスクリプトを使ってSWUイメージを作成してください。
作成された kernel.swu のインストールについては 「SWU イメージのインストール」 を参照ください。
build_rootfs で新しいルートファイルシステムをビルドする場合は build_rootfs を展開した後に以下のコマンドでインストールしてください。
|
build_rootfs のディレクトリ名を設定します。これによって、長いディレクトリ名を何度も入力する必要が無くなります。
| |
アットマークテクノが提供するカーネルをインストールしない様に、 linux-at-x2@atmark と記載された行を削除します。
| |
別のカーネルをすでにインストールしている場合は、新しいモジュールをインストールする前に古いモジュールを削除する必要があります。
|
6.25.3. Alpine Linux ルートファイルシステムをビルドするここでは、alpine/build-rootfsを使って、
Alpine Linux ルートファイルシステムを構築する方法を説明します。 alpine/build-rootfsはATDEで動作しているLinux上でArmadillo-IoT ゲートウェイ G4用の
aarch64アーキテクチャに対応したAlpine Linux
ルートファイルシステムを構築することができるツールです。
ルートファイルシステムのビルドに必要な Podman のインストール
次のコマンドを実行します。 [ATDE ~]$ sudo apt install podman btrfs-progs xxhash
alpine/build-rootfsの入手
Armadillo-IoT ゲートウェイ G4 開発用ツール から
「Alpine Linuxルートファイルシステムビルドツール」 ファイル (build-rootfs-[VERSION].tar.gz) を次のようにダウンロードします。 [ATDE ~/]$ wget https://download.atmark-techno.com/armadillo-iot-g4/tool/build-rootfs-latest.tar.gz
[ATDE ~/]$ tar xf build-rootfs-latest.tar.gz
[ATDE ~/]$ cd build-rootfs-[VERSION]
Alpine Linux ルートファイルシステムの変更
ax2ディレクトリ以下のファイルを変更することで、
ルートファイルシステムをカスタマイズすることができます。 | |
|---|
commonとax2 ディレクトリ直下にあるfixupやpackagesなどの同名ファイルは、それぞれのファイルを連結して利用されます。パッケージの削除などを行う場合は、commonディレクトリ以下のファイルも確認してください。 commonとax2内のサブディレクトリにある同名ファイルは、ax2のファイルが利用されます。 |
build-rootfsに含まれるファイルの説明は次の通りです。 表6.28 build-rootfsのファイル説明 | ファイル | 説明 |
|---|
ax2/resources/* | 配置したファイルやディレクトリは、そのままルートファイルシステム直下にコピーされます。
ファイルを追加する場合は、このディレクトリに入れてください。 | ax2/packages | このファイルに記載されているパッケージはルートファイルシステムにインストールされます。
パッケージを追加する場合はこのファイルに追加してください。 | ax2/fixup | このファイルに記載されているコマンドはパッケージのインストールが完了した後に実行されます。 | ax2/image_firstboot/* | 配置したファイルやディレクトリは、「ブートディスクの作成」や「初期化インストールディスクの作成」の手順
のようにブートディスクイメージを作成する際、そのままルートファイルシステム直下にコピーされます。 | ax2/image_installer/* | 配置したファイルやディレクトリは、「初期化インストールディスクの作成」の手順
のようにインストールディスクイメージを作成する際、
そのままインストーラーにコピーされます。ルートファイルシステムに影響はありません。 | ax2/image_common/* | 配置したファイルやディレクトリは、ブートディスクイメージおよびインストールディスクイメージを
作成する際、ルートファイルシステム、インストーラにそれぞれコピーされます。 |
| |
|---|
利用可能なパッケージは以下のページで検索することができます。 Alpine Linuxルートファイルシステムを起動している
Armadilloでも検索することができます。 [armadillo ~]# apk update
[armadillo ~]# apk search ruby
ruby-test-unit-rr-1.0.5-r0
ruby-rmagick-5.1.0-r0
ruby-public_suffix-5.0.0-r0
:
: (省略)
:
ruby-mustache-1.1.1-r5
ruby-nokogiri-1.13.10-r0 |
ビルド
次のコマンドを実行します。 パッケージをインターネット上から取得するため回線速度に依存しますが、
ビルドには数分かかります。 [ATDE ~/build-rootfs-[VERSION]]$ sudo ./build_rootfs.sh
use default(board=ax2)
use default(arch=aarch64)
use default(outdir=/home/xxxx/at-optee-build/build-rootfs)
use default(output=baseos-x2-ATVERSION.tar.zst)
'repositories' -> '/etc/apk/repositories'
:
: (略)
:
> Creating rootfs archive
-rw-r--r-- 1 root root 231700480 Nov 26 07:18 rootfs.tar
ERROR: No such package: .make-alpine-make-rootfs
============================================
footprint[byte] tarball[byte] packages
229904000 74942331 alpine-base coreutils chrony ...(省略)
============================================
done. | |
|---|
リリース時にバージョンに日付を含めたくないときは --release を引数に追加してください。 |
| |
|---|
インターネットに接続できない環境か、テスト済みのソフトウェアのみをインストールしたい場合は
Armadillo-IoT ゲートウェイ G4 開発用ツール から
キャッシュアーカイブもダウンロードして、
build_rootfs.sh --cache baseos-x2-[VERSION].cache.tar で使ってください。 |
| |
|---|
任意のパス、ファイル名で結果を出力することもできます。 [ATDE ~/build-rootfs-[VERSION]]$ ./build_rootfs.sh ~/alpine.tar.zst
:
: (略)
:
[ATDE ~/build-rootfs-[VERSION]]$ ls ~/alpine.tar.zst
~/alpine.tar.zst |
「Alpine Linux ルートファイルシステムビルドツール」のバージョンが3.18-at.7以降を使用している場合は、ビルドが終わると SBOM も [output].spdx.json として出力されます。
ライセンス情報等を記載するためのコンフィグファイルはデフォルトは baseos_sbom.yaml となっています。コンフィグファイルを変更する場合は --sbom-config <config> に引数を入れてください。
SBOM が不要な場合は --nosbom を引数に追加してください。 SBOM のライセンス情報やコンフィグファイルの設定方法については 「ビルドしたルートファイルシステムの SBOM を作成する」 をご覧ください。
インストール
ビルドしたルートファイルシステムは、以下に示すどちらかの方法でインストールしてください。
swupdate でインストールする
mkswu の初期化を行った後に 提供されているスクリプトを使ってSWUイメージを作成してください。 [ATDE ~/build-rootfs-[VERSION]]$ vi OS_update.desc
swdesc_tar --version base_os [VERSION] \
--preserve-attributes baseos-x2-[VERSION].tar.zst
[ATDE ~/build-rootfs-[VERSION]]$ mkswu OS_update.desc
OS_update.swu を作成しました。作成された OS_update.swu のインストールについては 「SWU イメージのインストール」 を参照ください。
「ブートディスクの作成」 でインストールする
手順を実行すると、ビルドされた baseos-x2-[VERSION].tar.zst が自動的に利用されます。
アットマークテクノでは ABOS 及び ABOS 上で動作する標準ソフトウェアの SBOM を提供しています。
また、開発したソフトウェアの SWU イメージを作成するタイミングで SBOM を生成することができます。
SBOM 生成手順は 「ビルドしたルートファイルシステムの SBOM を作成する」 もしくは 「SWU イメージと同時に SBOM を作成する」 を参照ください。 SBOM(Software Bill of Materials: ソフトウェア部品表) は、
ソフトウェアを構成するコンポーネントやソフトウェア間の依存関係、ライセンス情報を記したリストです。
経済産業省は、ソフトウェアサプライチェーンが複雑化する中で、
急激に脅威が増しているソフトウェアのセキュリティを確保するための管理手法の一つとして SBOM の導入を推進しています。
SBOM の導入はソフトウェアのトレーサビリティを確保し、脆弱性残留リスクの低減、脆弱性対応期間の低減に繋がります。
アットマークテクノが提供する SBOM は
ISO/IEC5962で国際標準となっているSPDX2.2のフォーマットに準拠しています。 SPDX2.2 の詳細については以下のドキュメントをご参照ください。 The Software Package Data Exchange® (SPDX®) Specification Version 2.2.2 アットマークテクノの提供する mkswu コマンドでは SWU を作成するタイミングで SBOM を生成することができます。 SBOM の利点はソフトウェアのサプライチェーン攻撃への対応です。
ソフトウェアのセキュリティ対策は日々見直されており、
トレーサビリティが明らかになることで、ソフトウェアに含まれる脆弱性に速やかに対処することが可能になります。
SBOM はトレーサビリティを辿るのに優れており、加えて、脆弱性スキャンツールを用いることで、
表面化していない脆弱性の発見に利用できます。
脆弱性スキャンツールには例として、Google が提供する osv-scanner が挙げられます。
脆弱性に関する詳細なリンクや、脆弱性の深刻度を示す CVSS(Common Vulnerability Scoring System) を出力します。
アットマークテクノが提供する SBOM は osv-scanner のスキャンに対応しています。 osv-scanner の詳細については以下をご参照ください。 OSV-Scanner アットマークテクノが提供している ABOS は
GPLv3(GNU General Public License 第3版)のソフトウェアを含まない構成で提供しています。
OSS(オープンソース・ソフトウェア)利用者に広く普及しているGPLv3は、
インストール用情報の開示義務、関連する特許ライセンスの許諾について定める条項が含まれ、
組み込み機器に適用する際の妨げになる場合があります。
SBOM にはパッケージのライセンス情報が含まれているため、GPLv3 ライセンスが含まれているかどうかの検出を可能にします。 6.26.3. ビルドしたルートファイルシステムの SBOM を作成する「Alpine Linux ルートファイルシステムをビルドする」 を実行すると、OS_update.swu と同じ場所に SBOM を作成します。
SBOM を作成するには、作成する対象のファイルとライセンス情報等を記載するためのコンフィグファイルが必要となります。
また、baseos-x2-[VERSION].tar.zst から、アーカイブに含まれるパッケージ情報やファイル情報を SBOM に記載します。 ライセンス情報等を記載するためのコンフィグファイルの例は以下のコマンドで確認することができます。
各項目に関する説明はコメントに記載しておりますので、必要に応じて値を変更してください。
各項目の詳細な説明については SPDX specification v2.2.2 (https://spdx.github.io/spdx-spec/v2.2.2/) をご覧ください。 [ATDE ~/build-rootfs-[VERSION]]$ cat submodules/make-sbom/config.yaml 作成したコンフィグファイルと、baseos-x2-[VERSION].tar.zst から OS_update.swu の SBOM を作成します。 [ATDE ~/build-rootfs-[VERSION]]$ ./build_sbom.sh -i OS_update.swu -c <コンフィグファイル> -f baseos-x2-[VERSION].tar.zst
INFO:root:created OS_update.swu.spdx.json 作成される SBOM は OS_update.swu.spdx.json になります。
json 形式で ISO/IEC5962で国際標準となっているSPDX2.2のフォーマットに準拠しています。 アットマークテクノが提供しているソフトウェアの SBOM は
ソフトウェアダウンロード
の各ソフトウェアダウンロードページからダウンロードすることができます。 6.26.4. SWU イメージと同時に SBOM を作成する「SWUイメージの作成」 の実行時に SBOM を作成する方法について説明します。
SWU イメージは desc ファイルから作成されます。この desc ファイルに SBOM 作成に必要な情報についても記載します。 SBOM を作成するには、作成する対象のファイルとライセンス情報等を記載するためのコンフィグファイルが必要となります。
コンフィグファイルについて指定がない場合はデフォルトのコンフィグファイルで SBOM を作成します。
デフォルトのコンフィグファイルは /usr/share/make-sbom/config/config.yaml にあります。
このファイルは SBOM 作成ツールによって配置されます。
コンフィグファイルを編集するために、例としてカレントディレクトリにコピーします。
リリース時には正しいコンフィグファイルの内容を記載してください。 [ATDE ~]$ cp /usr/share/make-sbom/config/config.yaml .
[ATDE ~]$ vi config.yaml ライセンス情報等を記載するためのコンフィグファイルの例は以下のコマンドで確認することができます。
各項目に関する説明はコメントに記載しておりますので、必要に応じて値を変更してください。
各項目の詳細な説明については SPDX specification v2.2.2 (https://spdx.github.io/spdx-spec/v2.2.2/) をご覧ください。 「desc ファイルを編集する」 で desc ファイルに編集したコンフィグファイルのパスを指定します。 SBOM 作成のために、desc ファイルに記載する項目を以下に示します。 表6.29 descファイルの設定項目 | 項目 | 設定値 | 説明 |
|---|
swdesc_option BUILD_SBOM=<mode> | auto(デフォルト): SBOM 作成ツールがある場合作成する | SBOM を作成するかどうか。記載がない場合は auto が選択される | yes: SBOMを作成する。SBOM 作成ツールがない場合はエラーする | no: SBOM を作成しない | swdesc_option sbom_config_yaml=<path> | ファイルパス | コンフィグファイルのパスを指定する。記載がない場合はデフォルトのコンフィグファイルを使用する | swdesc_sbom_source_file <path> | ファイルパス | SBOM に含めるファイルを指定する。記載がない場合は SBOM に含まれない |
以下に desc ファイルの記載例について示します。 |
SBOM を作成するように設定します。例として必ず作成するように "yes" を指定します。
| |
コンフィグファイルのパスを設定します。例としてカレントディレクトリにある config.yaml を指定します。
| |
SBOM に含めたいファイルがある場合に指定します。例として manifest.json を指定します。
|
desc ファイルの作成が出来たら 「SWUイメージの作成」 を実行すると、SWU イメージと同じ場所に SBOM が作成されます。
desc ファイルの内容によっては SBOM 作成に数分かかります。
作成される SBOM のファイル名は <SWU イメージ名>.spdx.json になります。
json 形式で ISO/IEC5962で国際標準となっているSPDX2.2のフォーマットに準拠しています。 eMMC は主に NAND Flash メモリから構成されるデバイスです。NAND Flash メモリには書き込みしてから1年から3年程度の長期間データが読み出されないと電荷が抜けてしまう可能性があります。その際、電荷が抜けて正しくデータが読めない場合は、eMMC 内部で ECC (Error Correcting Code) を利用してデータを訂正します。しかし、訂正ができないほどにデータが化けてしまう場合もあります。そのため、一度書いてから長期間利用しない、高温の環境で利用するなどのケースでは、データ保持期間内に電荷の補充が必要になります。電荷の補充にはデータの読み出し処理を実行し、このデータの読み出し処理をデータリテンションと呼びます。 Armadillo-IoT ゲートウェイ G4 に搭載のeMMCには長期間データが読み出されない状態であっても、データリテンションを自動的に行う機能を搭載しています。 データリテンションは /etc/conf.d/micron-emmc-reten というファイルに書かれた設定、use_system_time によって以下の 2 通りの挙動を示します。 表6.30 データリテンションの挙動 | /etc/conf.d/micron-emmc-reten | initiating condition |
|---|
use_system_time=yes | Linux 起動した時に前回のリテンションから 1 日以上経過していたら開始する | use_system_time=no (default) | Linux 起動した時に毎回開始する |
これで設定は完了しました。 以下は挙動ごとのシステム概略図です。 use_system_time を有効にした場合のデータリテンションの動作例を以下に示します。 6.27.2. より詳しくデータリテンションの統計情報を確認するにはMicron Technology が提供する emmcparm というツールを使うことで、データリテンションの統計情報を確認することができます。統計情報として eMMC 内部に保存されているのは実行回数、最終実行完了時のカウンター値、現在のデータリテンション処理の進捗があります。
次の手順で、emmcparmを使ってeMMCの情報を確認することができます。このツールではデータリテンション処理のことを「セルフリフレッシュ」と呼びます。
emmcparm をダウンロードする
以下の検索結果から最新の emmcparm をダウンロードする。ユーザー登録が必要になります。 | |
|---|
マニュアル作成時点では 5.0.0 を利用しました |
パッケージを展開する
[armadillo ~]# unzip emmc_emmcparm_c_code_derived_from_TN\ FC\ 25_v5.0.0 _binary.zip
SSR を取得する
[armadillo ~]# emmcparm/bin/emmcparm_arm_64bit -r /dev/mmcblk2 : (省略)
=======================================================================
| Secure Smart Report |
=======================================================================
Self Refresh progress of scan[215-212]: 0x00000000 (0)
Power Loss Counter[195-192]: 0x00000005 (5)
Current total ON time[131-128]: 0x00001b28 (6952)
Number of Blocks in Refresh Queue[99-96]: 0x00000000 (0)
Self Refresh Completion date [95-88]: 0xffffffffd8148931
(-669742799)
Self Refresh Loop Count[81-80]: 0x00000002 (2)
Written Data 100MB Size Count (from NAND)[79-76]: 0x0004889d (297117)
Cumulative Initialization Count (from NAND)[75-72]: 0x00005300 (21248)
Written Data 100MB Size Count (from RAM)[71-68]: 0x0004889d (297117)
Refresh Count[55-52]: 0x00000004 (4)
: (省略) |
現在のセルフリフレッシュ処理の進捗。0 ということは実行中ではない
| |
最後に行ったセルフリフレッシュのカウンター値
| |
セルフリフレッシュを行った回数
|
ここではデータリテンションを自動的におこなう機能の仕様について詳細に説明します。
Armadillo で採用しているeMMCには、データリテンションを自動的に実行することができる「セルフリフレッシュ」と呼ばれる機能が搭載されます。実行トリガーは 2 種類のうちどちらかを選択できます。OTP のため一度設定すると変更できません。この設定は出荷時に「eMMC 内部レジスタ値とコマンドに入力された値を比較して 1 日以上経過していると実行する」を設定しています。 -
リセット後に毎回実行する
-
eMMC 内部レジスタ値とコマンドに入力された値を比較して 1 日以上経過していると実行する
2 の設定の場合、セルリフレッシュ機能が実行されるまでの流れは以下のとおりです。 -
ホストによって eMMC がハードウェアもしくはソフトウェアリセットされる
-
一定時間 (delay 1) 以内に、ホストから SET_TIME (CMD49)と呼ばれるコマンドが eMMC に発行される
-
eMMC コントローラは、バスの稼動状態を監視する
eMMC コントローラは、アイドルになってから一定時間 (delay 2) 経過した後にセルフリフレッシュを実行する
-
ECC エラーなどのエラーがしきい値 (2) を越えたセルに対してのみセルフリフレッシュを実行する
Armadillo でのセルフリフレッシュ機能搭載 eMMC への設定は以下のとおりです。 表6.31 Armadillo のデータリテンションの設定 | setting | value | description |
|---|
RTC | ON | eMMC 内部レジスタの値と SET_TIME の値を比較してセルフリフレッシュを実行する | Delay 1 | 60s | リセット後の SET_TIME 有効期間 | Delay 2 | 100ms | アイドル確認後のセルフリフレッシュ実行までの遅れ時間 |
| |
|---|
詳しい情報は以下を参照してください。 マイクロンのサイトの会員登録が必要になります。 |
6.28. Linuxカーネルがクラッシュしたときにメモリの状態を保存するArmadilloはLinuxカーネルがクラッシュすると、ウォッチドッグタイマーによってシステムリセットが発生し、再起動します。 このとき、再起動によってメモリの内容が失われてしまうため、デバッグが困難になる場合があります。 ここでは Kdump を利用してLinuxカーネルがクラッシュしたときにメモリの状態(vmcore)を保存し、vmcoreを解析する方法を紹介します。 ここでは、Kdumpの実行環境を構築する手順を紹介します。
Linuxカーネルの準備
ArmadilloのLinuxカーネルをデバッグ用に変更します。以下で紹介する二つの方法のどちらかを選択してください。
ビルド済みのapkパッケージを利用する場合
以下のコマンドを実行します。 [armadillo ~]# persist_file -a del linux-at-x2
[armadillo ~]# persist_file -a add linux-at-x2-debug
Linuxカーネルをビルドする場合
以下のようにカーネルコンフィギュレーションを変更してください。 Kernel hacking --->
Compile-time checks and compiler options --->
[*] Compile the kernel with debug info <DEBUG_INFO>
[ ] Reduce debugging information <DEBUG_INFO_REDUCED> |
チェックを入れます
| |
チェックを外します
|
「Linux カーネルをビルドする」を参照して、ビルドおよびインストールしてください。
パッケージのインストール
makedumpfileをインストールします。 [armadillo ~]# persist_file -a add makedumpfile
| |
|---|
Armadillo Base OS 3.19 までは kdump-tools パッケージをインストールし kdump-tools サービスを使用していました。
サービスの設定以外は同じ手順で実行できます。 |
設定ファイルの編集
Kdumpの設定ファイルを確認します。 [armadillo ~]# vi /etc/conf.d/kdump
# Configuration for /etc/init.d/kdump
:(省略)
#kexec_args="--initrd=/boot/initramfs-cust /boot/vmlinuz-cust"
kexec_args=/boot/Image
:(省略)
kdump_dir=/var/app/volumes/crash
:(省略)
[armadillo ~]# persist_file /etc/conf.d/kdump |
Linuxカーネルイメージのパスを指定します。initrd を使用する場合は例のように設定できます。
| |
vmcoreを保存するディレクトリを指定します。少なくとも30MByte以上の空き容量が必要です。
| |
変更した場合、ファイルを永続化します。
|
kdumpサービスの有効化
kdump サービスの自動起動を有効化します。 [armadillo ~]# rc-update add kdump
[armadillo ~]# persist_file /etc/runlevels/default/kdump |
kdumpサービスの自動起動を有効にします。
| |
ファイルを永続化します。
|
Linuxカーネル起動時パラメータの指定
Kdumpで利用するメモリサイズを、Linuxカーネル起動時パラメータのcrashkernelに指定します。「u-boot の環境変数の設定」を参照し、環境変数optargsを設定してください。 以下の例では、Kdumpで利用するメモリサイズを128MByteに指定しています。 [armadillo ~]# vi /boot/uboot_env.d/kdump
optargs=quiet nokaslr crashkernel=128M
[armadillo ~]# persist_file -v /boot/uboot_env.d/kdump
'/boot/uboot_env.d/kdump' -> '/mnt/boot/uboot_env.d/kdump'
[armadillo ~]# fw_setenv -s /boot/uboot_env.d/kdump
Environment OK, copy 0
[armadillo ~]# fw_printenv | grep optargs=
optargs=quiet nokaslr crashkernel=128M
[armadillo ~]# reboot |
コンフィグファイルを生成します。
| |
デフォルト値である"quiet nokaslr"の後ろに追加しています。デフォルト値が不要であれば、削除しても問題ありません。
| |
ファイルを永続化します。
| |
変数を書き込みます。
| |
書き込んだ変数を確認します。
| |
再起動して、設定を反映させます。
|
以上で、Kdumpを利用する準備は完了です。Linuxカーネルがクラッシュした場合に、Kdumpによってvmcoreが保存されるようになりました。
ここでは、故意にLinuxカーネルをクラッシュさせ、Kdumpの動作確認を行う手順を紹介します。 [armadillo ~]# echo c > /proc/sysrq-trigger
[ 19.295633] sysrq: Trigger a crash
[ 19.299079] Kernel panic - not syncing: sysrq triggered crash
: (省略)
[ 19.386503] Starting crashdump kernel...
[ 19.390426] Bye!
: (省略)
Copying data : [100.0 %] / eta: 0s
kdump |
kdump |The dumpfile is saved to /var/app/volumes/crash/2024-07-17-15:08:57/dump.
kdump |
kdump |makedumpfile Completed.
kdump |
kdump |The dmesg log is saved to /var/app/volumes/crash/2024-07-17-15:08:57/dmesg.
kdump |
kdump |makedumpfile Completed.
kdump | * Dump done, rebooting
: (省略)
[ 20.189148] imx2-wdt 30280000.watchdog: Device shutdown: Expect reboot!
[ 20.201853] reboot: Restarting system
: (省略)
armadillo:~# ls /var/app/volumes/crash/2024-07-17-15:08:57
dmesg dump |
SysRqキーの"c"コマンドを実行してLinuxカーネルをクラッシュさせます。
| |
Kdumpに指定したLinuxカーネルがブートローダーを経由せずに起動します。
| |
Kdumpがvmcoreを保存した後、自動的に再起動します。
| |
作成されたファイルを確認します。
| |
dmesgはLinuxカーネルのログです。dumpはvmcoreです。
|
Armadilloの再起動完了後、Kdumpのログに表示されたディレクトリ(/var/app/volumes/crash/[DATE]/)から、Linuxカーネルがクラッシュした時のvmcoreやdmesgを確認することができます。 ここでは、vmcoreの内容を確認する手順を紹介します。 vmcoreの内容を確認するには、次の3つが必要です。 vmcoreは、「Kdumpの動作確認」で作成した /var/app/volumes/crash/[DATE]/dump です。vmlinuxおよびcrashコマンドの準備については、以下の手順を参照してください。
vmlinuxの準備
現在動作しているLinuxカーネルと一緒にビルドされたvmlinuxを取得します。 「Kdumpを利用する準備」でどちらのLinuxカーネルを選択したかによって手順が異なります。以下で紹介する二つの方法のどちらかを選択してください。
ビルド済みのapkパッケージに含まれているLinuxカーネルが動作している場合
以下のコマンドを実行してvmlinuxを取得します。vmlinuxは、ホストとコンテナ間で共有する/var/app/volumes/crash/に配置します。 [armadillo ~]# cd /var/app/volumes/crash/
[armadillo /var/app/volumes/crash]# apk fetch linux-at-x2-dbg
[armadillo /var/app/volumes/crash]# mv linux-at-x2-dbg-[VERSION].apk linux-at-x2-dbg.tar.gz
[armadillo /var/app/volumes/crash]# tar xf linux-at-x2-dbg.tar.gz
[armadillo /var/app/volumes/crash]# ln -s usr/lib/debug/lib/modules/[VERSION]/vmlinux .
ビルドしたLinuxカーネルが動作している場合
ビルドしたLinuxカーネルディレクトリ直下にvmlinuxが作成されています。 [armadillo ~]# ls linux-[VERSION]/vmlinux
linux-[VERSION]/vmlinux vmlinuxを/var/app/volumes/crash/にコピーしてください。
crashコマンドの準備
crashコマンドを利用する為に、「アットマークテクノが提供するイメージを使う」を参照してdebianコンテナを作成してください。 | |
|---|
crashコマンドが利用できるディストリビューションであれば、debian以外を利用しても構いません。 |
以下のコマンドを実行してcrashをインストールします。 [armadillo ~]# vi /etc/atmark/containers/kdump.conf
set_image localhost/at-debian-image:latest
set_command sleep infinity
add_volumes /var/app/volumes/crash:/mnt:ro
[armadillo ~]# podman_start kdump
Starting 'kdump'
8e7ad42534e3fb968dbf597d679246346ae4f766ac33ab0265008f30a7bf7d11
[armadillo ~]# podman exec -it kdump bash
[container /]# apt install crash |
ホスト OS 側の /var/app/volumes/crash をコンテナ内の /mnt にマウントするように設定します。
| |
crashコマンドを含むcrashパッケージをインストールします。
|
vmcoreの確認
以下のコマンドを実行してcrashを起動します。起動に成功するとcrashのプロンプトが表示され、不具合の解析を行うことができるようになります。 [container /]# crash /mnt/vmlinux /mnt/[DATE]/dump
:(省略)
crash> | |
|---|
crashのコマンド一覧は、helpコマンドで確認できます。 crash> help helpの引数にコマンドを与えると、そのコマンドの詳細を確認できます。例としてbtコマンドの詳細は以下のように確認できます。 crash> help bt |
Armadillo-IoT ゲートウェイ G4 ではシステムが出力するログの一部は、
一般的な /var/log ディレクトリではなく、/var/at-log ディレクトリに出力されます。
/var/at-log は、ルートファイルシステムとは別のパーティションになっているので、
ルートファイルシステムに障害が発生した場合でも、/var/at-log のパーティションが無事であれば、
ログファイルを取り出して、不具合等の解析に利用することができます。 Armadillo-IoT ゲートウェイ G4 で /var/log 配下に出力するログに関しては 「/var/log/ 配下のログに関して」 を参照ください。 ログファイルは /var/at-log ディレクトリ内に atlog というファイル名で作成されているので、
これを任意のディレクトリにコピーすることで取り出せます。
もし、eMMC 上のルートファイルシステムが壊れてしまい起動できない場合は、
microSD カードから起動することでログファイルを取り出すことができます。 | |
|---|
/var/at-log/atlog はファイルサイズが 3MiB になるとローテートされ /var/at-log/atlog.1 に移動されます。 /var/at-log/atlog.1 が存在する状態で、更に /var/at-log/atlog のファイルサイズが 3MiB になった場合は、 /var/at-log/atlog の内容が /var/at-log/atlog.1 に上書きされます。 /var/at-log/atlog.2 は生成されません。 |
ログファイルの内容はテキストデータであり、以下のようなフォーマットになっています。 atlog には以下の内容が保存されています。 -
インストール状態のバージョン情報
-
swupdate によるアップデートの日付とバージョン変更
-
abos-ctrl / uboot の rollback 日付
-
uboot で wdt による再起動があった場合にその日付
ログ出力先である /var/at-log ディレクトリには、
GPP である /dev/mmcblk2gp1 パーティションがマウントされています。
このパーティションに論理的な障害が発生した場合は、/dev/mmcblk2gp1 の
データを /dev/mmcblk2gp2 にコピーし、/dev/mmcblk2gp1 は FAT ファイルシステムで
フォーマットされます。
このパーティションの障害チェックはシステム起動時に自動的に実行されます。 6.29.5. /var/log/ 配下のログに関して表6.32「/var/log/ 配下のログ」 に Armadillo-IoT ゲートウェイ G4 で /var/log/ 配下に出力するログを示します。 最大ファイルサイズを超えると 表6.32「/var/log/ 配下のログ」 の「ファイル名」の 2 行目に記載されたファイル名にコピーします。 その状態から更に最大ファイルサイズを超えた場合、 表6.32「/var/log/ 配下のログ」 の「ファイル名」の 2 行目に記載されたファイル名に上書きします。 表6.32 /var/log/ 配下のログ | ファイル名 | 説明 | 最大ファイルサイズ | 最大ファイル数 |
|---|
/var/log/messages
/var/log/messages.0 | 通常のログです。 | 4MiB | 2 | /var/log/connection-recover.log
/var/log/connection-recover.log.0 | 3G/LTE 搭載モデルで 3G/LTE 再接続サービスを稼働させているときに出力されるログです。
Armadillo Base OS バージョン 3.19.1-at5 以降で対応しております。 | 128KiB | 2 | /var/log/armadillo-twin-agent/agent_log
/var/log/armadillo-twin-agent/agent_log.1 | Armadillo Twin Agent の動作ログです。 | 1MiB | 2 |
6.30. シリアル通信ソフトウェア(minicom)のセットアップ | |
|---|
ATDE9 v20240925 以降の ATDE では以下の設定を実施した状態のイメージを配布しています。
これより前のバージョンの場合は、次の手順に沿って minicom のシリアル通信設定を実施してください。 |
minicom を使用して Armadillo とシリアルコンソール経由で通信を行うためには、
表6.33「シリアル通信設定」 のとおりにあらかじめ設定しておく必要があります。
ここでは、その設定手順について説明します。
また、minicomを起動する端末の横幅を80文字以上にしてください。横幅が80文字より小さい場合、コマンド入力中に表示が乱れることがあります。 表6.33 シリアル通信設定 | 項目 | 設定 |
|---|
転送レート | 115,200bps | データ長 | 8bit | ストップビット | 1bit | パリティ | なし | フロー制御 | なし |
図6.250「minicomの設定の起動」に示すコマンドを実行し、minicomの設定画面を起動してください。
図6.251「minicomの設定」が表示されますので、「Serial port setup」を選択してください。
図6.252「minicomのシリアルポートの設定」が表示されますので、Aキーを押してSerial Deviceを選択してください。
Serial Device に使用するデバイスファイル名として /dev/ttyUSB0 を入力してEnterキーを押してください。
| デバイスファイル名の確認方法 |
|---|
デバイスファイル名は、環境によって /dev/ttyS0 や /dev/ttyUSB1 など、本書の実行例とは異なる場合があります。 その場合は以下の方法でデバイスファイル名を確認してください。 Linux で PC と Armadillo 側のシリアルポートを接続した場合、コンソールに以下のようなログが表示されます。
ログが表示されなくても、dmesgコマンドを実行することで、ログを確認することができます。
上記の例では Armadillo 側のシリアルポートが ttyUSB0 に割り当てられたことが分かります。 |
-
Fキーを押してHardware Flow ControlをNoに設定してください。
-
Gキーを押してSoftware Flow ControlをNoに設定してください。
キーボードのEキーを押してください。
図6.254「minicomのシリアルポートのパラメータの設定」 が表示されます。
-
図6.254「minicomのシリアルポートのパラメータの設定」では、転送レート、データ長、ストップビット、パリティの設定を行います。
現在の設定値は「Current」に表示されています。
それぞれの値の内容は図6.255「minicomシリアルポートの設定値」を参照してください。
-
Eキーを押して、転送レートを115200に設定してください。
-
Qキーを押して、データ長を8、パリティをNone、ストップビットを1に設定してください。
-
Enterキーを2回押して、図6.251「minicomの設定」に戻ってください。
-
図6.251「minicomの設定」から、「Save setup as dfl」を選択し、設定を保存してください。
-
「Exit from Minicom」を選択し、minicomの設定を終了してください。
| |
|---|
Ctrl-a に続いて z キーを入力すると、minicomのコマンドヘルプが表示されます。
|
viエディタは、Armadilloに標準でインストールされているテキストエディタです。本書では、Armadilloの設定ファイルの編集などにviエディタを使用します。 viエディタは、ATDEにインストールされてるgeditやemacsなどのテキストエディタとは異なり、モードを持っていることが大きな特徴です。viのモードには、コマンドモードと入力モードがあります。コマンドモードの時に入力した文字はすべてコマンドとして扱われます。入力モードでは文字の入力ができます。 本章で示すコマンド例はATDEで実行するよう記載していますが、Armadilloでも同じように実行することができます。 viを起動するには、以下のコマンドを入力します。 file にファイル名のパスを指定すると、ファイルの編集( file が存在しない場合は新規作成)を行います。viはコマンドモードの状態で起動します。
文字を入力するにはコマンドモードから入力モードへ移行する必要があります。コマンドモードから入力モードに移行するには、表6.34「入力モードに移行するコマンド」に示すコマンドを入力します。入力モードへ移行後は、キーを入力すればそのまま文字が入力されます。 表6.34 入力モードに移行するコマンド | コマンド | 動作 |
|---|
i | カーソルのある場所から文字入力を開始 | a | カーソルの後ろから文字入力を開始 |
「i」、「a」それぞれのコマンドを入力した場合の文字入力の開始位置を図6.257「入力モードに移行するコマンドの説明」に示します。 入力モードからコマンドモードに戻りたい場合は、ESCキーを入力することで戻ることができます。現在のモードが分からなくなった場合は、ESCキーを入力し、一旦コマンドモードへ戻ることにより混乱を防げます。 | |
|---|
日本語変換機能をOFFに viのコマンドを入力する時はATDEの日本語入力システム(Mozc)をOFFにしてください。日本語入力システムのON/OFFは、半角/全角キーで行うことができます。 |
| |
|---|
viでの文字削除 コンソールの環境によってはBS(Backspace)キーで文字が削除できず、「^H」文字が入力される場合があります。その場合は、「文字の削除」で説明するコマンドを使用し、文字を削除してください。 |
方向キーでカーソルの移動ができますが、コマンドモードで表6.35「カーソルの移動コマンド」に示すコマンドを入力することでもカーソルを移動することができます。 表6.35 カーソルの移動コマンド | コマンド | 動作 |
|---|
h | 左に1文字移動 | j | 下に1文字移動 | k | 上に1文字移動 | l | 右に1文字移動 |
ファイルの保存、終了を行うコマンドを表6.37「保存・終了コマンド」に示します。 表6.37 保存・終了コマンド | コマンド | 動作 |
|---|
:q!
| 変更を保存せずに終了 | :w[file]
| ファイルを file に指定して保存 | :wq
| ファイルを上書き保存して終了 |
保存と終了を行うコマンドは「 : 」(コロン)からはじまるコマンドを使用します。" : "キーを入力すると画面下部にカーソルが移り入力したコマンドが表示されます。コマンドを入力した後Enterキーを押すことで、コマンドが実行されます。 本章では、Armadillo-IoT ゲートウェイ G4のオプション品について説明します。 表6.38 Armadillo-IoT ゲートウェイ G4関連のオプション品 Armadillo-IoT ゲートウェイ G4用のアルミ製ケースです。
基板を収めた状態で、DCジャック、LAN×2、USB、HDMI、USBコンソール、スイッチ、LEDにアクセスすることが可能となっています。 | |
|---|
コネクタ開口部等に存在する継ぎ目状の加工痕は正常な状態ですのでご了承ください。
|
| |
|---|
DXF形式の形状図を「アットマークテクノ Armadilloサイト」から「購入者向けの限定公開データ」としてダウンロード可能です。 |
6.32.2. 3G/LTE用外付けアンテナ、アンテナケーブル3G/LTE用の外付けアンテナおよびアンテナケーブルです。 6.32.3. 無線LAN/BT用外付けアンテナ、アンテナケーブル無線LAN/BT用の外付けアンテナおよびアンテナケーブルです。 6.32.4. Armadillo-X2、G4 ケースモデル VESA規格固定用プレートArmadillo-X2、G4 ケースモデル VESA規格固定用プレートはVESA規格(100 × 100mm)に対応したテレビやモニターなどに
Armadillo-X2およびArmadillo-IoT ゲートウェイ G4のケースモデルを取り付けるための製品です。 表6.39 Armadillo-X2、G4 ケースモデル VESA規格固定用プレートについて 製品名 | Armadillo-X2、G4 ケースモデル VESA規格固定用プレート | 型番 | OP-CASEX2-VESA-00 | セット内容 | VESA規格固定用プレート、ケース固定用ねじ×2、プレート固定用ねじ×4 |
表6.40 Armadillo-X2、G4 ケースモデル VESA規格固定用プレートの仕様 色 | 黒 | 材質 | 鉄 | 寸法 | 120 × 123 mm | 板厚 | 2 mm |
オプションケース(金属製)の底面には、ケース固定用のM3のネジ穴が2箇所あります。この穴を利用して、VESA規格固定用プレートを取り付けます。 VESA規格固定用プレートの中央側にある2箇所の穴が、ケース取り付け用の穴です。ケース底面の穴とVESA規格固定用プレートの穴位置を合わせて、皿もみ加工されている面から、ねじ頭がすっぽり収まるまで、ねじを締めてください。推奨のねじ締めトルクは 31.5cN•m です。 -

-
皿小ねじ(M3、L=4mm) × 2
| |
|---|
故障の原因となりますので、付属ねじ以外をご使用の場合、ケース内部の基板や部品にねじが接触していないか、十分にご確認ください。 |
VESA規格固定用プレートの4隅の穴が、VESA規格(100 x 100mm)に対応した穴です。ケースと重なるため、固定に使用できる穴は2箇所となります。 ケース取り付け済みのVESA規格固定用プレートを
VESA規格(100 x 100mm)に対応したテレビやモニターなどに取り付けます。 -
-
バインド小ねじ(M4、L=10mm) × 2
| |
|---|
DXF形式の形状図を「アットマークテクノ Armadilloサイト」から「購入者向けの限定公開データ」としてダウンロード可能です。 |
| |
| | | |
| |