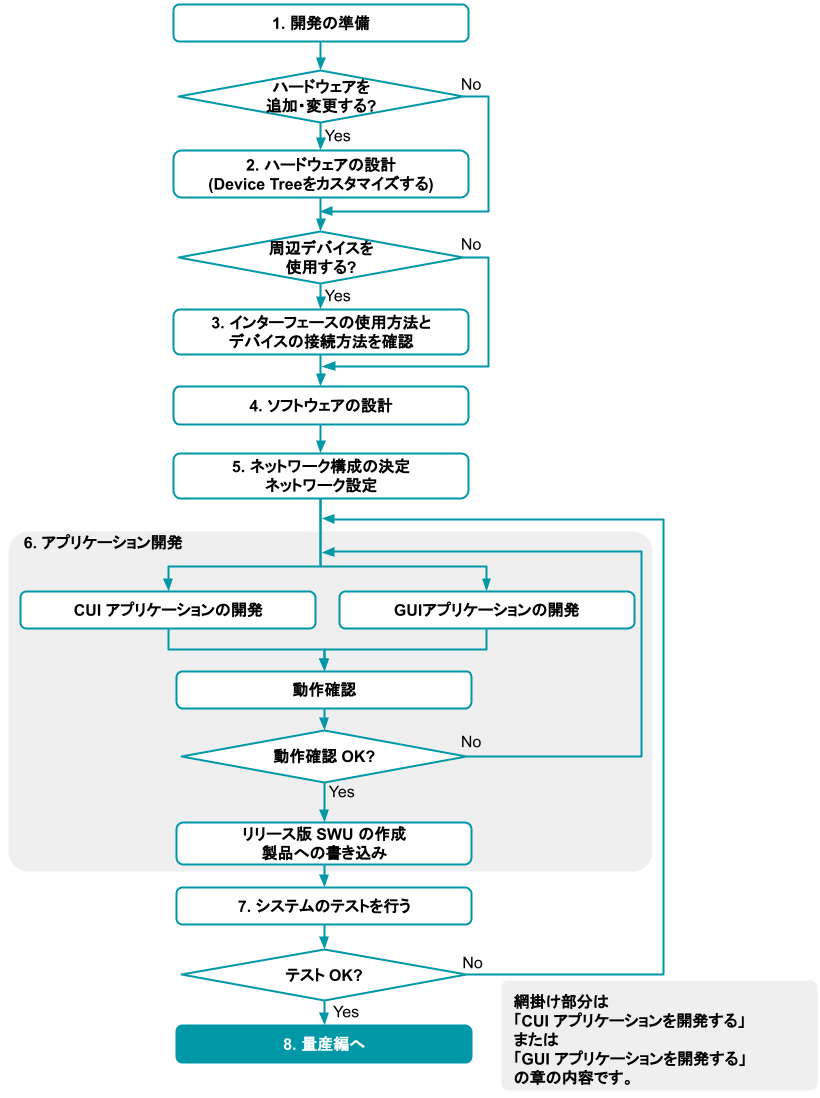
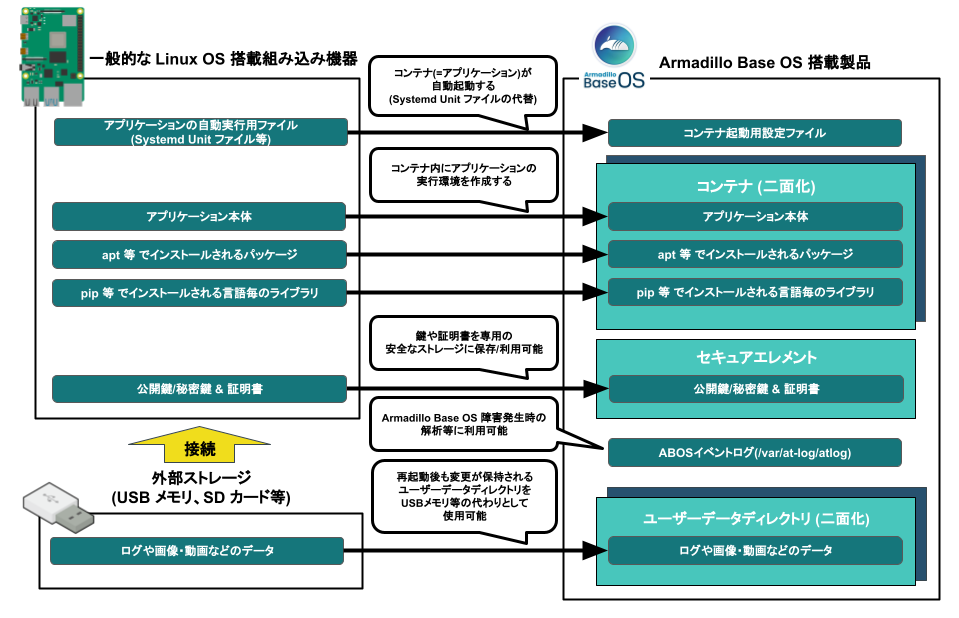
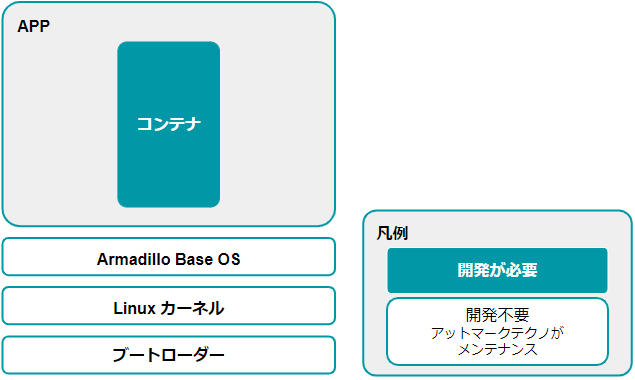
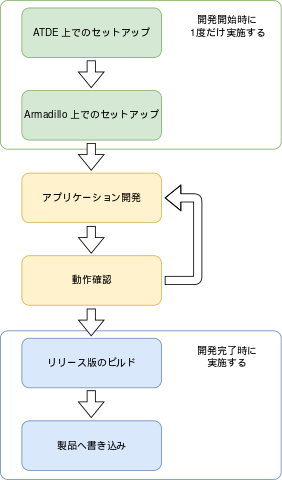
| | Armadillo-IoT ゲートウェイ G4 では基本的に ATDE という Armadillo 専用開発環境と、 Visual Studio Code 向け Armadillo 開発用エクステンションを用いてアプリケーション開発を行っていきます。 基本的な Armadillo-IoT ゲートウェイ G4 でのアプリケーション開発の流れを図3.1「アプリケーション開発の流れ」に示します。 本章では、図3.1「アプリケーション開発の流れ」に示す開発時の流れに沿って手順を紹介していきます。 3.2. 開発前に知っておくべき Armadillo Base OS の機能・特徴「Armadillo Base OSとは」にて Armadillo Base OS についての概要を紹介しましたが、開発に入るにあたってもう少し詳細な概要について紹介します。 3.2.1. 一般的な Linux OS 搭載組み込み機器との違いLinux OS 搭載組み込み機器ではアプリケーションの実行環境をユーザーランド上に直接用意し、Systemdなどでアプリケーションを自動実行させるのが一般的です。
Armadillo Base OS 搭載機器では、アプリケーションの実行環境をコンテナ内に用意して、コンテナ起動用設定ファイルを所定の場所に配置することでコンテナ(=アプリケーション)を自動実行させます。 また、Linux OS 搭載組み込み機器では、ストレージの保護のために overlayfs で運用するのが一般的です。
そのため、アプリケーションが出力するログや画像などのデータは、 USBメモリなどの外部デバイスに保存する必要があります。
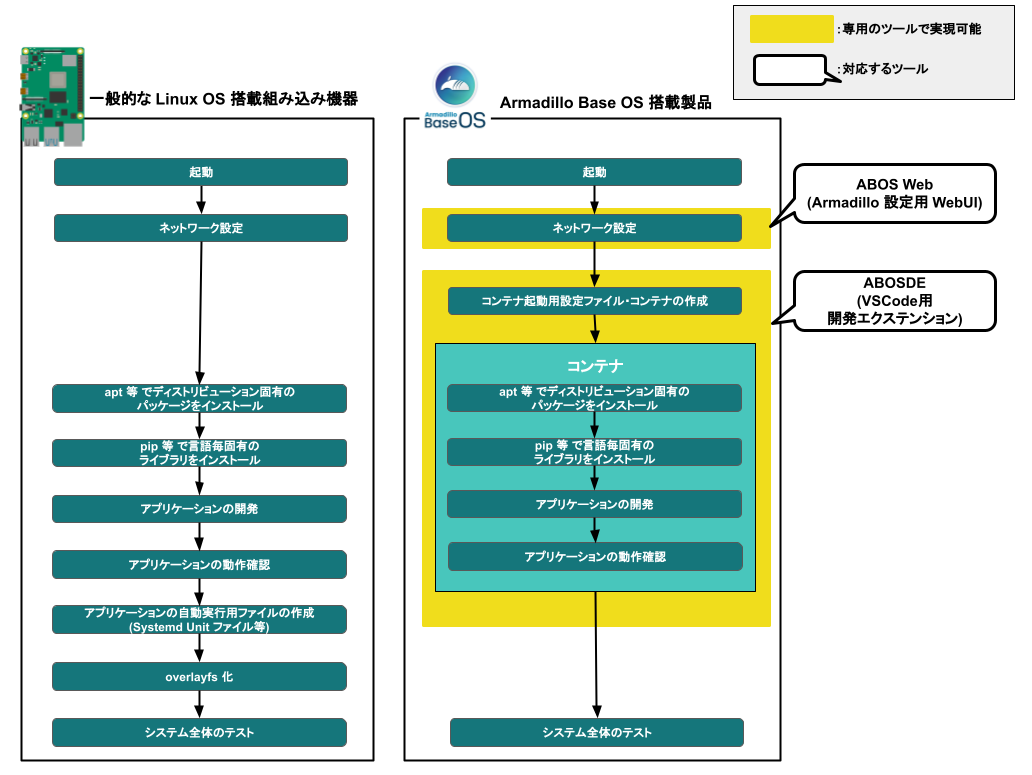
Armadillo Base OS 搭載機器もルートファイルシステムが overlayfs 化されていますが、内部に USBメモリなどと同じように使用できるユーザーデータディレクトリを持っており、別途外部記録デバイスを用意しておく必要はありません。 Armadillo Base OS 搭載機器は、標準でセキュアエレメントを搭載しており、対応した暗号化方式の認証鍵や証明書を安全に保存・利用することが可能です。 3.2.2. Armadillo Base OS 搭載機器のソフトウェア開発手法Armadillo Base OS 搭載機器上で動作するソフトウェアの開発は、基本的に作業用PC上で行います。 ネットワークの設定は ABOS Web という機能で、コマンドを直接打たずとも設定可能です。 開発環境として、ATDE(Atmark Techno Development Environment)という仮想マシンイメージを提供しています。
その中で、ABOSDE(Armadillo Base OS Development Environment)という、Visual Studio Code にインストールできる開発用エクステンションを利用してソフトウェア開発を行います。 ABOSDE を使用することで、コンテナ及びコンテナ自動起動用設定ファイルの作成、コンテナ内におけるパッケージのインストール、コンテナ内で動作するアプリケーション本体の開発をすべてVSCode内で行うことができます。 Armadillo-IoT ゲートウェイ G4 では、開発・製造・運用時にソフトウェアを書き込む際に、 SWUpdate という仕組みを利用します。 SWUpdateは、デバイス上で実行されるプログラムで、ネットワーク/ストレージ経由でデバイスのソフトウェアを更新することができます。
Stefano Babic, DENX software engineering, Germany によってオープンソースで開発が進められています。 Armadillo-IoT ゲートウェイ G4 では、 SWUpdateを利用することで次の機能を実現しています。 -
A/Bアップデート(アップデートの2面化)
-
リカバリーモード
-
ソフトウェアの圧縮、暗号化、署名付与
-
Web サーバーでのリモートアップデート対応
-
hawkBit でのリモートアップデート対応
-
ダウングレードの禁止
swuパッケージは、SWUpdate独自のソフトウェアの配布フォーマットです。
SWUpdateでは、1回のアップデートは1つのswuパッケージで行われます。 swuパッケージには、次のような様々なものを含めることができます。 -
アップデート対象のイメージファイル
-
アップデート対象のイメージファイルのチェックサム
-
アップデート前後に実行するスクリプト
-
書き込み先ストレージの情報
-
U-Boot 環境変数の書き換え情報
-
ソフトウェアのバージョン情報
-
etc…
SWU イメージは swupdate (https://sbabic.github.io/swupdate/swupdate.html) によって Armadillo Base OS上で検証とインストールが実行されます。
SWU イメージを Armadillo に転送するための方法は、用途や状況に合わせて様々な方法を用意しています。例えば、 USB メモリから読み取る、ウェブサーバーからダウンロードする、 hawkBit という Web アプリケーションを使うなどです。 3.2.3.3. A/Bアップデート(アップデートの2面化)A/B アップデートは、
Flash メモリにパーティションを2面確保し、
アップデート時には交互に利用する仕組みです。 常に使用していない方のパーティションを書き換えるため次の特徴を持ちます。 -
○ アップデートによって動作中のソフトウェアは破壊されない
-
○ 書き込みが電源断などで中断後しても、すぐに復帰出来る
-
○ 機器が動作中に書き込みが出来る
-
× 使用Flashメモリ量が増える
システムが起動できなくなった際に、自動的にアップデート前のシステムにロールバックします。 ロールバック状態の確認は 「ロールバック状態を確認する」 を参照してください。 ロールバックする条件は次の通りです: ロールバックが実行されると /var/at-log/atlog にログが残ります。 イメージをインストールする方法として以下に示すような方法があります。
もし、作成した SWU イメージのインストールに失敗する場合は、「swupdate がエラーする場合の対処」をご覧ください。
USBメモリまたはSDカードからの自動インストール
Armadillo-IoT ゲートウェイ G4にUSBメモリを接続すると自動的にアップデートが始まります。
アップデート終了後にArmadillo-IoT ゲートウェイ G4は自動で再起動します。 USBメモリやSDカードをvfatもしくはext4形式でフォーマットし、作成した.swuのファイルをディレクトリを作らずに配置してください。 [ATDE ~/mkswu]$ df -h
Filesystem Size Used Avail Use% Mounted on
: (省略)
/dev/sda1 15G 5.6G 9.1G 39% /media/USBDRIVE  [ATDE ~/mkswu]$ cp initial_setup.swu /media/USBDRIVE/
[ATDE ~/mkswu]$ cp initial_setup.swu /media/USBDRIVE/  [ATDE ~/mkswu]$ umount /media/USBDRIVE
[ATDE ~/mkswu]$ umount /media/USBDRIVE  |
USBメモリがマウントされている場所を確認します。
| |
ファイルをコピーします。
| |
/media/USBDRIVEをアンマウントします。コマンド終了後にUSBメモリを取り外してください。
|
エラーの場合、/var/log/messageに保存されます。例えば、コンソールで証明の間違ったイメージのエラーを表示します: [armadillo ~]# tail /var/log/messages
Nov 19 10:48:42 user.notice swupdate-auto-update: Mounting sda0 on /mnt
Nov 19 10:48:42 user.notice swupdate-auto-update: Trying update /mnt/initial_setup.swu
Nov 19 10:48:42 user.info swupdate: START Software Update started !
Nov 19 10:48:42 user.err swupdate: FAILURE ERROR : Signature verification failed
Nov 19 10:48:42 user.err swupdate: FAILURE ERROR : Compatible SW not found
Nov 19 10:48:42 user.err swupdate: FATAL_FAILURE Image invalid or corrupted. Not installing ... |
証明が間違ったメッセージ。
|
外部記憶装置からイメージのインストール(手動)
USBメモリやmicroSDカード等の外部記憶装置のルートディレクトリ以外にswuイメージを保存して、イメージのインストールを行います。
ルートディレクトリに保存すると自動アップデートが行われますので、/var/log/messagesを確認してください。 以下は外部記憶装置が/dev/mmcblk1p1(microSDカード)として認識された場合に、イメージのインストールを行う例です。 [armadillo ~]# mount /dev/mmcblk1p1 /mnt
[armadillo ~]# swupdate -i /mnt/swu/initial_setup.swu
SWUpdate v5f2d8be-dirty
Licensed under GPLv2. See source distribution for detailed copyright notices.
[INFO ] : SWUPDATE running : [main] : Running on AGX4500 Revision at1
[INFO ] : SWUPDATE started : Software Update started !
[INFO ] : SWUPDATE running : [read_lines_notify] : No base os update: copying current os over
[INFO ] : SWUPDATE running : [read_lines_notify] : Removing unused containers
[INFO ] : SWUPDATE running : [read_lines_notify] : swupdate triggering reboot!
Killed
ウェブサーバーからイメージのインストール(手動)
swuイメージをウェブサーバーにアップロードして、イメージのインストールを行います。
以下は、http://server/initial_setup.swu のイメージをインストールする例です。
[armadillo ~]# swupdate -d '-u http://server/initial_setup.swu'
SWUpdate v5f2d8be-dirty
Licensed under GPLv2. See source distribution for detailed copyright notices.
[INFO ] : SWUPDATE running : [main] : Running on AGX4500 Revision at1
[INFO ] : SWUPDATE running : [channel_get_file] : Total download size is 25 kB.
[INFO ] : SWUPDATE started : Software Update started !
[INFO ] : SWUPDATE running : [read_lines_notify] : No base os update: copying current os over
[INFO ] : SWUPDATE running : [read_lines_notify] : Removing unused containers
[INFO ] : SWUPDATE running : [read_lines_notify] : swupdate triggering reboot!
Killed
ウェブサーバーからの定期的な自動インストール
swupdate-urlを有効にしたら、定期的にチェックしてインストールします。
以下はサービスの有効化とタイミングの設定の例です。 [armadillo ~]# rc-update add swupdate-url
[armadillo ~]# persist_file /etc/runlevels/default/swupdate-url
[armadillo ~]#
echo https://download.atmark-techno.com/{url-product-dir}/image/baseos-x2-latest.swu \
> /etc/swupdate.watch
[armadillo ~]# echo 'schedule="0 tomorrow"' > /etc/conf.d/swupdate-url
[armadillo ~]# echo 'rdelay="21600"' >> /etc/conf.d/swupdate-url  [armadillo ~]# persist_file /etc/swupdate.watch /etc/conf.d/swupdate-url
[armadillo ~]# persist_file /etc/swupdate.watch /etc/conf.d/swupdate-url  |
swupdate-urlサービスを有効します。
| |
サービスの有効化を保存します。
| |
イメージのURLを登録します。一行ごとにイメージのURLを設定することができ、複数行にイメージのURLを設定することができます。
| |
チェックやインストールのスケジュールを設定します。
| |
変更した設定ファイルを保存します。
|
USBメモリからのアップデートと同様に、ログは/var/log/messagesに保存されます。 ![[ティップ]](images/tip.png) | |
|---|
initial_setupのイメージを作成の際に /usr/share/mkswu/examples/enable_swupdate_url.desc を入れると有効にすることができます。 |
hawkBit を使用した自動インストール
hawkBit で Armadillo-IoT ゲートウェイ G4 を複数台管理してアップデートすることができます。
「hawkBitサーバーから複数のArmadilloに配信する」を参考にしてください。
Armadillo Base OS ではルートファイルシステムに overlayfs を採用しています。 その為、ファイルを変更した後 Armadillo の電源を切ると変更内容は保持されません。
開発中などに rootfs の変更内容を保持するには、変更したファイルに対して persist_file コマンドを使用します。 persist_file コマンドの詳細については、「persist_file について」を参照してください。
また、 SWUpdate によってルートファイルシステム上に配置されたファイルについては、 persist_file を実行しなくても保持されます。
開発以外の時は安全のため、 persist_file コマンドではなく SWUpdate による更新を実行するようにしてください。 3.2.4.1. 電源を切っても保持されるディレクトリ(ユーザーデータディレクトリ)「ファイルの取り扱いについて」 にて、 Armadillo Base OS 上のファイルは通常、 persist_file コマンドを実行せずに電源を切ると変更内容が保存されないと紹介しましたが、表3.1「電源を切っても保持されるディレクトリ(ユーザーデータディレクトリ)」に示すディレクトリ内にあるファイルはこの限りでありません。 表3.1 電源を切っても保持されるディレクトリ(ユーザーデータディレクトリ) | ディレクトリ | 備考 |
|---|
/var/app/volumes | SWUpdate 後には削除されます。ログやデータベースなど、アプリケーションが動作中に作成し続けるようなデータの保存に向いています。 | /var/app/rollback/volumes | SWUpdate の最中や後も保持され続けます。コンフィグファイルなど、アプリケーションのバージョンに追従してアップデートするようなデータの保存に向いています。 |
| |
|---|
コンテナを前のバージョンに戻した場合(ロールバック)、/var/app/rollback/volumes/ のデータの前のバージョンに戻ります。 その為、アプリケーションのバージョンに依存するようなデータは /var/app/rollback/volumes/ に入れることを推奨します。 mkswu の swdesc_files (--extra-os 無し)と podman_start の add_volumes では、相対パスはそのディレクトリをベースにします。
/var/app/rollback/volumes/myvolume は myvolume で簡潔に指定できます。
|
![[警告]](images/warning.png) | |
|---|
Copy-on-Write (CoW) について。 この二つの volumes ディレクトリは btrfs と呼ばれるファイルシステムに保存されています。
btrfs ではデータは Copy on Write(CoW)を使ってデータ完全性を保証しますが、その保証にはコストがあります。 数百 MB のファイルに小さな変更を頻繁に行う場合 CoW を無効化することを推奨します。
CoW を無効化されたファイルにチェックサムが入らなくなりますので、極端な場合以外に残してください。
|
chattr +C でディレクトリに NoCow を設定します。これから作成されるファイルが NoCow で作成されます。すでに存在していたファイルに影響ないのでご注意ください。
| |
lsattr 確認します。リストの C の字があればファイルが「no cow」です。
|
|
インストールディスクは、 Armadillo の eMMC の中身をまとめて書き換えることのできる microSD カードを指します。
インストールディスクは、インストールディスクイメージを microSD カードに書き込むことで作成できます。 インストールディスクには以下の2つの種類があります。 3.2.5.1. 初期化インストールディスクの作成-
512 MB 以上の microSD カードを用意してください。
標準のインストールディスクイメージを使用する場合は、
Armadillo-IoT ゲートウェイ G4 インストールディスクイメージ から
「Armadillo Base OS」をダウンロードしてください。
「Armadilloのソフトウェアをビルドする」 でビルドしたイメージを使用してインストールディスクを作成したい場合は、
以下のコマンドを実行して、インストールディスクイメージを作成してください。 [ATDE ~/build-rootfs-[VERSION]]$ sudo ./build_image.sh \
--firmware ~/at-imxlibpackage/imx_lib.img
: (省略)
[ATDE ~/build-rootfs-[VERSION]]$ ls baseos-x2*img
baseos-x2-[VERSION].img
[ATDE ~/build-rootfs-[VERSION]]$ sudo ./build_image.sh \
--boot ~/imx-boot-[VERSION]/imx-boot_armadillo_x2 \
--installer ./baseos-x2-[VERSION].imgコマンドの実行が完了すると、baseos-x2-[VERSION]-installer.img というファイルが作成されていますので、
こちらを使用してください。 -
ATDE に microSD カードを接続します。詳しくは「取り外し可能デバイスの使用」を参考にしてください。
microSD カードのデバイス名を確認します
[ATDE ~]$ ls /dev/sd?
/dev/sda /dev/sdb
[ATDE ~]$ sudo fdisk -l /dev/sdb
Disk /dev/sdb: 7.22 GiB, 7751073792 bytes, 15138816 sectors
Disk model: SD/MMC
: (省略)
microSD カードがマウントされている場合、アンマウントします。
[ATDE ~]$ mount
: (省略)
/dev/sdb1 on /media/52E6-5897 type ext2 (rw,nosuid,nodev,relatime,uid=1000,gid=1000,fmask=0022,dmask=0077,codepage=cp437,iocharset=utf8,shortname=mixed,showexec,utf8,flush,errors=remount-ro,uhelper=udisks)
[ATDE ~]$ sudo umount /dev/sdb1
ダウンロードしたファイルを展開し、imgファイルをmicroSDカードに書き込んでください。
Linux PCの場合、以下のようにmicroSDカードに書き込むことができます。 [ATDE ~]$ unzip baseos-x2-installer-[VERSION].zip
[ATDE ~]$ sudo dd if=baseos-x2-installer-[VERSION].img \
of=/dev/sdb bs=1M oflag=direct status=progressまた、Windowsの場合、エクスプローラー等でZipファイルからimgファイルを取り出し、「Win32 Disk Imager」などを使用してmicroSDカードに書き込むことができます。
-
JP1ジャンパーをショート(SDブートに設定)し、microSDカードをCON1に挿入します。
-
電源を投入すると、1分程度でeMMCのソフトウェアの初期化が完了します。
-
完了すると電源が切れます(LED4が消灯、コンソールに
reboot: Power down が表示)。
-
電源を取り外し、続いてJP1ジャンパーとmicroSDカードを外してください。
-
10秒以上待ってから再び電源を入れると、初回起動時と同じ状態になります。
Armadilloを使用する前に、次のものを必要に応じて準備してください。 -
作業用PC
-
LinuxまたはWindowsが動作し、ネットワークインターフェースと 1つ以上のUSBポートを持つPCです。「開発/動作確認環境の構築」を参照して、作業用PC上に開発/動作確認環境を構築してください。
-
ネットワーク環境
-
Armadilloと作業用PCをネットワーク通信ができるようにしてください。
-
microSDカード
-
microSDスロットの動作を確認する場合などに利用します。
-
USBメモリ
-
USBの動作を確認する場合などに利用します。
-
tar.xz形式のファイルを展開するソフトウェア
-
開発/動作確認環境を構築するために利用します。Linuxでは、tar で展開できます。Windowsでは、7-Zip や Lhazなどが対応しています。
-
nanoSIM(UIM カード)とAPN 情報
-
LTE モデルで 3G/LTE の動作を確認する場合に利用します。通信事業者との契約が必要です。SMS の動作を確認する場合は、SMS が利用可能な nanoSIM(UIM カード)が必要です。
アットマークテクノ製品のソフトウェア開発や動作確認を簡単に行うために、VMware仮想マシンのデータイメージを提供しています。このVMware仮想マシンのデータイメージをATDE(Atmark Techno Development Environment)と呼びます。ATDEの起動には仮想化ソフトウェアであるVMwareを使用します。ATDEのデータは、tar.xz圧縮されています。環境に合わせたツールで展開してください。 | |
|---|
仮想化ソフトウェアとして、VMwareの他にOracle VM VirtualBoxが有名です。
Oracle VM VirtualBoxには以下の特徴があります。 -
GPL v2(General Public License version 2)で提供されている []
-
VMware形式の仮想ディスク(.vmdk)ファイルに対応している
Oracle VM VirtualBoxからATDEを起動し、ソフトウェア開発環境として使用することができます。 |
ATDEは、バージョンにより対応するアットマークテクノ製品が異なります。本製品に対応しているATDEは、ATDE9 の v20211201 以降です。 ATDE9 は Debian GNU/Linux 11 (コードネーム bullseye) をベースに、Armadillo-IoT ゲートウェイ G4 のソフトウェア開発を行うために必要なクロス開発ツールや、Armadillo-IoT ゲートウェイ G4 の動作確認を行うために必要なツールが事前にインストールされています。 ATDEを使用するためには、作業用PCにVMwareがインストールされている必要があります。
VMware社 Webページ(http://www.vmware.com/)を参照し、利用目的に合うVMware製品をインストールしてください。
また、ATDEのアーカイブは tar.xz圧縮されていますので、環境に合せたツールで展開してください。 | |
|---|
VMwareは、非商用利用限定で無償のものから、商用利用可能な有償のものまで複数の製品があります。製品ごとに異なるライセンス、エンドユーザー使用許諾契約書(EULA)が存在するため、十分に確認した上で利用目的に合う製品をご利用ください。 |
| |
|---|
VMwareやATDEが動作しないことを未然に防ぐため、使用するVMwareのドキュメントから以下の項目についてご確認ください。 -
ホストシステムのハードウェア要件
-
ホストシステムのソフトウェア要件
-
ゲストOSのプロセッサ要件
VMwareのドキュメントは、VMware社 Webページ(http://www.vmware.com/)から取得することができます。 |
3.3.2.4. WindowsでATDEのアーカイブ展開する
7-Zipのインストール
7-Zipをインストールします。7-Zipは、圧縮解凍ソフト 7-Zipのサイト(https://7-zip.opensource.jp/)からダウンロード取得可能です。
7-Zipの起動
7-Zipを起動します。
xz圧縮ファイルの選択
xz圧縮ファイルを展開して、tar形式のファイルを出力します。tar.xz形式のファイルを選択して、「展開」をクリックします。
xz圧縮ファイルの展開先の指定
「展開先」を指定して、「OK」をクリックします。
xz圧縮ファイルの展開
展開が始まります。
tarアーカイブファイルの選択
xz圧縮ファイルの展開が終了すると、tar形式のファイルが出力されます。tarアーカイブファイルを出力したのと同様の手順で、tarアーカイブファイルからATDEのデータイメージを出力します。tar形式のファイルを選択して「展開」をクリックし、「展開先」を指定して、「OK」をクリックします。
展開の完了確認
tarアーカイブファイルの展開が終了すると、ATDEアーカイブの展開は完了です。「展開先」に指定したフォルダにATDEのデータイメージが出力されています。
3.3.2.5. Linuxでtar.xz形式のファイルを展開する
tar.xz圧縮ファイルの展開
tar の xf オプションを使用して tar.xz 圧縮ファイルを展開します。
[PC ~]$ tar xf atde9-amd64-[VERSION].tar.xz
展開の完了確認
tar.xz圧縮ファイルの展開が終了すると、ATDEアーカイブの展開は完了です。 atde9-amd64-[VERSION] ディレクトリにATDEのデータイメージが出力されています。 [PC ~]$ ls atde9-amd64-[VERSION]/
atde9-amd64-s001.vmdk atde9-amd64-s008.vmdk
atde9-amd64-s002.vmdk atde9-amd64-s009.vmdk
atde9-amd64-s003.vmdk atde9-amd64.nvram
atde9-amd64-s004.vmdk atde9-amd64.vmdk
atde9-amd64-s005.vmdk atde9-amd64.vmsd
atde9-amd64-s006.vmdk atde9-amd64.vmx
atde9-amd64-s007.vmdk atde9-amd64.vmxf
ATDEのアーカイブを展開したディレクトリに存在する仮想マシン構成(.vmx)ファイルをVMware上で開くと、ATDEを起動することができます。ATDE9にログイン可能なユーザーを、表3.2「ユーザー名とパスワード」に示します []。 表3.2 ユーザー名とパスワード | ユーザー名 | パスワード | 権限 |
|---|
atmark
| atmark
| 一般ユーザー | root
| root
| 特権ユーザー |
| |
|---|
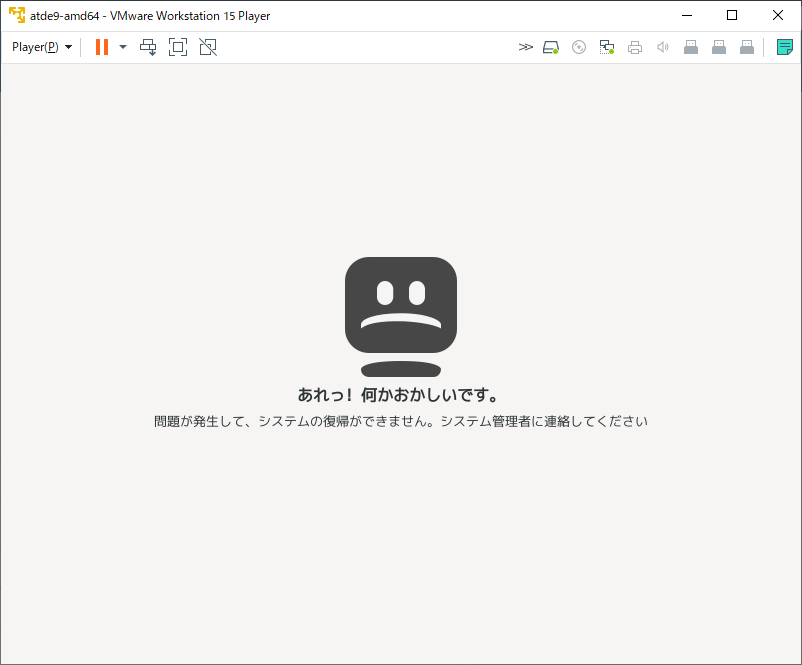
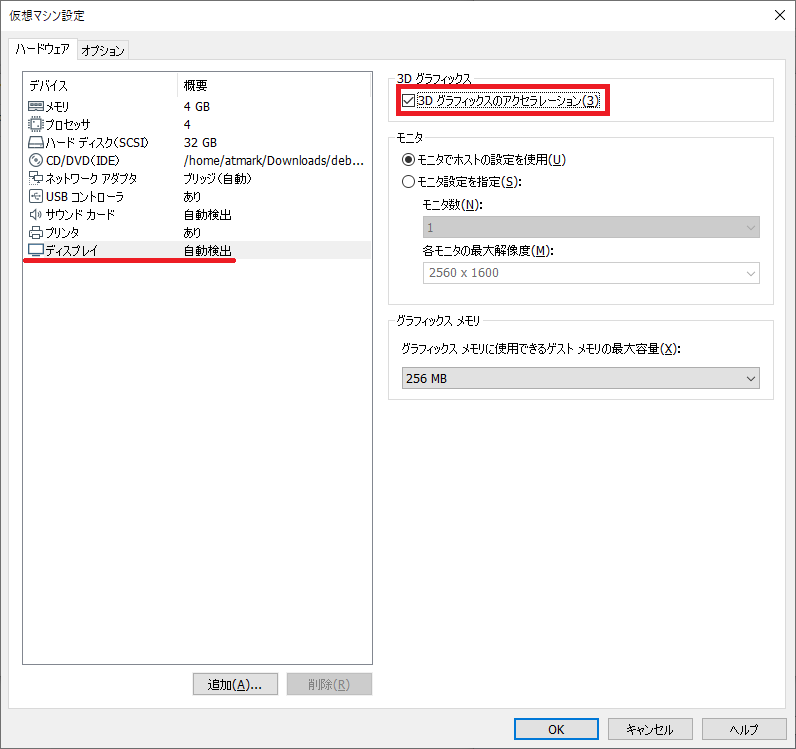
ATDEを起動する環境によっては、GUIログイン画面が表示されずに以下のようなエラー画面が表示される場合があります。 この場合は、VMwareの設定で「3D グラフィックスのアクセラレーション」をONにした後、ATDEを起動すると
正常にGUIログイン画面が表示されます。設定箇所を以下に示します。 |
| |
|---|
ATDEに割り当てるメモリおよびプロセッサ数を増やすことで、ATDEをより快適に使用することができます。仮想マシンのハードウェア設定の変更方法については、VMware社 Webページ(http://www.vmware.com/)から、使用しているVMwareのドキュメントなどを参照してください。 |
VMwareは、ゲストOS (ATDE)による取り外し可能デバイス(USBデバイスやDVDなど)の使用をサポートしています。デバイスによっては、ホストOS (VMwareを起動しているOS)とゲストOSで同時に使用することができません。そのようなデバイスをゲストOSで使用するためには、ゲストOSにデバイスを接続する操作が必要になります。 Armadillo-IoT ゲートウェイ G4の動作確認を行うためには、表3.3「動作確認に使用する取り外し可能デバイス」に示すデバイスをゲストOSに接続する必要があります。 表3.3 動作確認に使用する取り外し可能デバイス | デバイス | デバイス名 |
|---|
USBシリアル変換IC | Silicon CP2102N USB to UART Bridge Controller |
3.3.2.8. コマンドライン端末(GNOME端末)の起動ATDEで、CUI (Character-based User Interface)環境を提供するコマンドライン端末を起動します。ATDEで実行する各種コマンドはコマンドライン端末に入力し、実行します。コマンドライン端末にはいくつかの種類がありますが、ここではGNOMEデスクトップ環境に標準インストールされているGNOME端末を起動します。 GNOME端末を起動するには、図3.4「GNOME端末の起動」のようにデスクトップ左上のアプリケーションの「ユーティリティ」カテゴリから「端末」を選択してください。 図3.5「GNOME端末のウィンドウ」のようにウィンドウが開きます。 3.3.2.9. シリアル通信ソフトウェア(minicom)の使用シリアル通信ソフトウェア(minicom)のシリアル通信設定を、表3.4「シリアル通信設定」のように設定します。また、minicomを起動する端末の横幅を80文字以上にしてください。横幅が80文字より小さい場合、コマンド入力中に表示が乱れることがあります。 表3.4 シリアル通信設定 | 項目 | 設定 |
|---|
転送レート | 115,200bps | データ長 | 8bit | ストップビット | 1bit | パリティ | なし | フロー制御 | なし |
図3.6「minicomの設定の起動」に示すコマンドを実行し、minicomの設定画面を起動してください。
図3.7「minicomの設定」が表示されますので、「Serial port setup」を選択してください。
図3.8「minicomのシリアルポートの設定」が表示されますので、Aキーを押してSerial Deviceを選択してください。
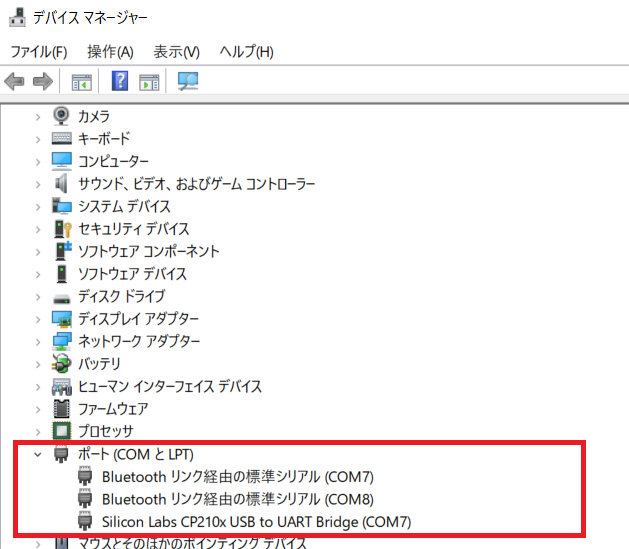
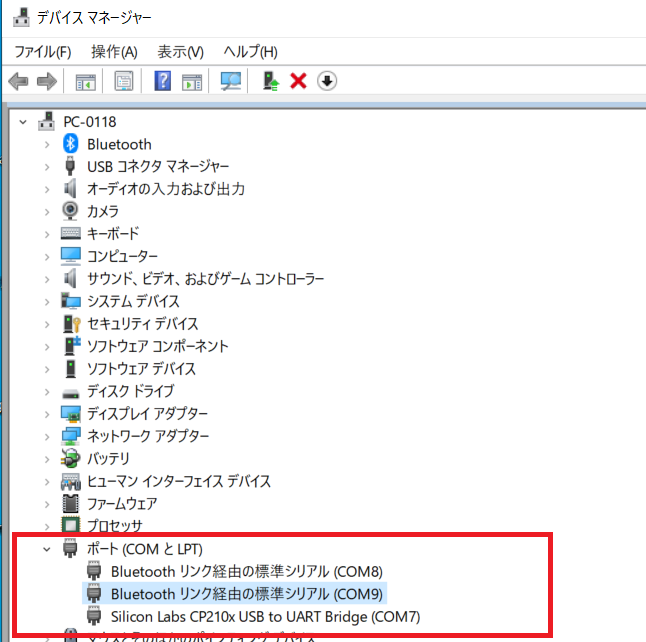
Serial Deviceに使用するシリアルポートを入力してEnterキーを押してください。
| シリアル通信用USBケーブル(A-microB)使用時のデバイスファイル確認方法 |
|---|
Linuxでシリアル通信用USBケーブル(A-microB)を接続した場合、コンソールに以下のようなログが表示されます。
ログが表示されなくても、dmesgコマンドを実行することで、ログを確認することができます。
上記のログからシリアル通信用USBケーブル(A-microB)がttyUSB0に割り当てられたことが分かります。 |
-
Fキーを押してHardware Flow ControlをNoに設定してください。
-
Gキーを押してSoftware Flow ControlをNoに設定してください。
キーボードのEキーを押してください。
図3.10「minicomのシリアルポートのパラメータの設定」 が表示されます。
-
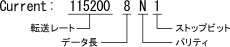
図3.10「minicomのシリアルポートのパラメータの設定」では、転送レート、データ長、ストップビット、パリティの設定を行います。
現在の設定値は「Current」に表示されています。
それぞれの値の内容は図3.11「minicomシリアルポートの設定値」を参照してください。
-
Eキーを押して、転送レートを115200に設定してください。
-
Qキーを押して、データ長を8、パリティをNone、ストップビットを1に設定してください。
-
Enterキーを2回押して、図3.7「minicomの設定」に戻ってください。
-
図3.7「minicomの設定」から、「Save setup as dfl」を選択し、設定を保存してください。
-
「Exit from Minicom」を選択し、minicomの設定を終了してください。
minicomを起動させるには、図3.12「minicom起動方法」のようにしてください。 ![[注記]](images/note.png) | |
|---|
デバイスファイル名は、環境によって /dev/ttyS0 や /dev/ttyUSB1 など、本書の実行例とは異なる場合があります。 |
| |
|---|
minicomがオープンする /dev/ttyS0 や /dev/ttyUSB0 といったデバイスファイルは、 root または dialout グループに属しているユーザーしかアクセスできません。 ユーザーを dialout グループに入れることで、以降、sudoを使わずにminicomで /dev/ttyUSB0 をオープンすることができます。 [ATDE ~]$ sudo usermod -aG dialout atmark
[ATDE ~]$ LANG=C minicom --wrap --device /dev/ttyUSB0 |
minicomを終了させるには、まず Ctrl-a に続いて q キーを入力します。その後、以下のように表示されたら「Yes」にカーソルを合わせてEnterキーを入力するとminicomが終了します。 | |
|---|
Ctrl-a に続いて z キーを入力すると、minicomのコマンドヘルプが表示されます。
|
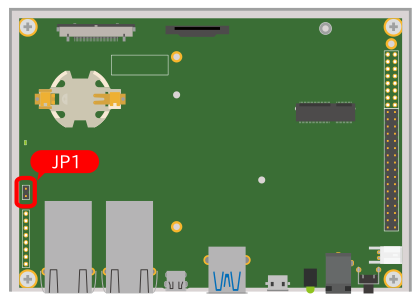
ジャンパの設定を変更することで、Armadillo-IoT ゲートウェイ G4 の動作を変更することができます。 各ジャンパは必要に応じて切り替えの指示があります。ここでは、JP1をオープンに設定しておきます。 | ジャンパのオープン、ショートとは |
|---|
-
-
「オープン」とはジャンパピンにジャンパソケットを接続していない状態です。
-
-
「ショート」とはジャンパピンにジャンパソケットを接続している状態です。
|
電源入力インターフェースに電源を接続すると Armadillo-IoT ゲートウェイ G4 が起動します。起動すると CON6 (USB コンソールインターフェース) から起動ログが表示されます。 | |
|---|
Armadillo-IoT ゲートウェイ G4 の電源投入時点でのジャンパ JP1 の状態によって起動モードが変化します。 詳しくは 「起動デバイスを変更する」 を参照してください。 |
以下に起動ログの例を示します。 U-Boot SPL 2020.04-at7 (May 21 2022 - 11:21:55 +0900)
DDRINFO: start DRAM init
DDRINFO: DRAM rate 4000MTS
DDRINFO:ddrphy calibration done
DDRINFO: ddrmix config done
Normal Boot
Trying to boot from BOOTROM
image offset 0x0, pagesize 0x200, ivt offset 0x0
NOTICE: BL31: v2.4(release):lf-5.10.y-1.0.0-0-gba76d337e956
NOTICE: BL31: Built : 11:08:22, Apr 6 2022
U-Boot 2020.04-at7 (May 21 2022 - 11:21:55 +0900)
CPU: i.MX8MP[8] rev1.1 1600 MHz (running at 1200 MHz)
CPU: Industrial temperature grade (-40C to 105C) at 26C
Model: Atmark-Techno Armadillo X2 Series
DRAM: Hold key pressed for tests: t (fast) / T (slow)
2 GiB
WDT: Started with servicing (10s timeout)
MMC: FSL_SDHC: 1, FSL_SDHC: 2
Loading Environment from MMC... OK
In: serial
Out: serial
Err: serial
BuildInfo:
- ATF ba76d33
- U-Boot 2020.04-at7
first boot since power on
switch to partitions #0, OK
mmc2(part 0) is current device
flash target is MMC:2
Net: eth0: ethernet@30be0000 [PRIME], eth1: ethernet@30bf0000
Fastboot: Normal
Saving Environment to MMC... Writing to redundant MMC(2)... OK
Normal Boot
Hit any key to stop autoboot: 0
switch to partitions #0, OK
mmc2(part 0) is current device
31051784 bytes read in 675 ms (43.9 MiB/s)
Booting from mmc ...
## Checking Image at 40480000 ...
Unknown image format!
60012 bytes read in 5 ms (11.4 MiB/s)
## Flattened Device Tree blob at 45000000
Booting using the fdt blob at 0x45000000
Using Device Tree in place at 0000000045000000, end 0000000045011a6b
Starting kernel ...
[ 1.606026] imx6q-pcie 33800000.pcie: invalid resource
[ 2.618095] imx6q-pcie 33800000.pcie: failed to initialize host
[ 2.624095] imx6q-pcie 33800000.pcie: unable to add pcie port.
OpenRC 0.44.7.10dab8bfb7 is starting up Linux 5.10.117-r0 (aarch64)
* Mounting /proc ... [ ok ]
* Mounting /run ... * /run/openrc: creating directory
* /run/lock: creating directory
* /run/lock: correcting owner
* Caching service dependencies ... [ ok ]
* Starting rngd ... * Mounting /sys ... * Remounting devtmpfs on /dev ... [ ok ]
[ ok ]
* Mounting security filesystem ... [ ok ]
* Mounting config filesystem ... [ ok ]
[ ok ]
* Mounting fuse control filesystem ... * Mounting /dev/mqueue ... [ ok ]
[ ok ]
* Mounting /dev/pts ... [ ok ]
* Mounting /dev/shm ... [ ok ]
fsck_atlog | * Checking at-log filesystem /dev/mmcblk2gp1 ...udev | * Starting udev ... [ ok ]
[ ok ]
cryptsetup | * Decrypting encrypted secondary partitions ...overlayfs | * Preparing overlayfs over / ... [ ok ]
[ ok ]
udev-trigger | * Generating a rule to create a /dev/root symlink ...hostname | * Setting hostname ... [ ok ]
[ ok ]
udev-trigger | * Populating /dev with existing devices through uevents ... [ ok ]
fsck | * Checking local filesystems ... [ ok ]
root | * Remounting filesystems ... [ ok ]
localmount | * Mounting local filesystems ... [ ok ]
urandom | * Saving 4096 bits of creditable seed for next boot
bootmisc | * Migrating /var/lock to /run/lock ... [ ok ]
bootmisc | * Creating user login records ... [ ok ]
bootmisc | * Wiping /var/tmp directory ... [ ok ]
dbus | * /run/dbus: creating directory
dbus | * /run/dbus: correcting owner
micron-emmc-reten | * Starting micron-emmc-reten
dbus | * Starting System Message Bus ...syslog | * Starting busybox syslog ... [ ok ]
[ ok ]
networkmanager | * Starting networkmanager ... [ ok ]
buttond | * Starting button watching daemon ...podman-atmark | * Starting configured podman containers ... [ ok ]
[ ok ]
reset_bootcount | * Resetting bootcount in bootloader env ...Environment OK, copy 1
chronyd | * Starting chronyd ...reset_bootcount | [ ok ]
sshd | * Starting sshd ... [ ok ]
[ ok ]
local | * Starting local ... [ ok ]
Welcome to Alpine Linux 3.15
Kernel 5.10.117-r0 on an aarch64 (/dev/ttymxc1)
armadillo login: U-Boot プロンプト USB コンソールインターフェース に"Hit any key to stop autoboot:" が出力されている間に何かしらのキー入力を行うと U-Boot のプロンプトが表示されます。この間にキー入力がなければ自動的に起動します。 : (省略)
BuildInfo:
- ATF ba76d33
- U-Boot 2020.04-at7
first boot since power on
switch to partitions #0, OK
mmc2(part 0) is current device
flash target is MMC:2
Net: eth0: ethernet@30be0000 [PRIME], eth1: ethernet@30bf0000
Fastboot: Normal
Saving Environment to MMC... Writing to redundant MMC(2)... OK
Normal Boot
Hit any key to stop autoboot: 0
u-boot=> 起動が完了するとログインプロンプトが表示されます。
初期状態では「root」ユーザーと、一般ユーザーである「atmark」ユーザーが存在しますが、「atmark」ユーザーは初期状態ではロックされていますので、「root」ユーザーでログインしてください。
「root」ユーザーは初回ログイン時にパスワードを入力せずに新しいパスワードを促されます。 「root」ユーザーでログインし、 passwd atmark コマンドで「atmark」ユーザーのパスワードを設定することで、「atmark」ユーザーのロックが解除されます。
設定するパスワードには大文字のアルファベット、小文字のアルファベット、0から9までの数字、その他(記号・句読点など)を含める事ができます。
root でログイン
初期パスワードを変更します。 armadillo login: root
You are required to change your password immediately (administrator enforced).
New password:
Retype new password:
Welcome to Alpine! |
新しいパスワードを入力します
| |
新しいパスワードを再入力します
|
atmark でログイン
初期状態でロックされてますので、rootで一度パスワードを設定してからログインします。 armadillo:~# passwd atmark
New password:
Retype new password:
passwd: password updated successfully
armadillo:~# persist_file /etc/shadow
armadillo:~# exit
Welcome to Alpine Linux 3.16
Kernel 5.10.118-1-at on an aarch64 (/dev/ttymxc1)
armadillo login: atmark
Password:
Welcome to Alpine! |
atmarkユーザーのパスワード変更コマンドです。
| |
パスワードファイルを永続化します。
| |
設定したパスワードでログインすることができます。
|
| |
|---|
Armadillo BaseOS ではルートファイルシステムに overlayfs を採用しており、そのままではシステムが OFF すると内容は消えてしまいます。そのため persist_file コマンドが用意されています。このコマンドを利用することでファイル単位で変更を反映することができます。パスワードを設定した後には以下のコマンドを実行してください。 [armadillo ~]# persist_file /etc/shadow persist_file コマンドに関する詳細は「persist_file について」を参照してください。 |
eMMC や USB メモリ等に書き込みを行っている時に電源を切断すると、データが破損する可能性が有ります。
安全に終了させる場合は、次のように poweroff コマンドを実行し、「reboot: Power down」と表示されたのを確認してから電源を切断します。 [armadillo ~]# poweroff
* WARNING: clock skew detected!
urandom | * Saving random seed ...chronyd | * Stopping chronyd ...syslog | * Stopping busybox syslog ... [ ok ]
overlayfs | * Unmounting /etc ...rngd | * Stopping rngd ...podman-atmark | * Stopping Start podman containers ... [ ok ] [ ok ]
* start-stop-daemon: no matching processes found
podman-atmark | [ ok ]
[ ok ]
udev | * Stopping udev ...hwclock | * Setting hardware clock using the system clock [UTC] ... [ ok ]
* in use but fuser finds nothing
overlayfs | [ !! ]
overlayfs | * Unmounting /dev/shm/overlay_etc_lower ... [ ok ]
networkmanager | * Stopping networkmanager ...overlayfs | * Unmounting /var ...nm-dispatcher: req:1 'connectivity-change': find-scripts: Cannot execute '/etc/Netw.
[ ok ]
dbus | * Stopping System Message Bus ...nm-dispatcher: System bus stopped. Exiting
* in use but fuser finds nothing
overlayfs | [ !! ]
[ ok ]
overlayfs | * Unmounting /dev/shm/overlay_var_lower ... [ ok ]
overlayfs | * Unmounting /root ... [ ok ]
overlayfs | * Unmounting /dev/shm/overlay_root_lower ... [ ok ]
localmount | * Unmounting loop devices
overlayfs | * Unmounting /home ...localmount | * Unmounting filesystems
localmount | * Unmounting /var/tmp ... [ ok ]
localmount | * Unmounting /var/app/volumes ... [ ok ]
localmount | * Unmounting /var/app/rollback/volumes ... [ ok ]
localmount | * Unmounting /var/lib/containers/storage_readonly ... [ ok ]
localmount | * Unmounting /var/log ... [ ok ]
localmount | * Unmounting /tmp ... [ ok ]
localmount | * Unmounting /home ...
* in use but fuser finds nothing
localmount | [ !! ]
localmount | * Unmounting /var ... [ ok ]
localmount | * Unmounting /etc ... * in use but fuser finds nothing
localmount | [ !! ]
[ ok ]
overlayfs | * Unmounting /dev/shm/overlay_home_lower ... [ ok ]
killprocs | * Terminating remaining processes ...mount-ro | * Remounting remaining filesystems read-only ... * Remounting /etc read only ... [ ok ]
mount-ro | * Remounting / read only ... [ ok ]
mount-ro | [ ok ]
The system is going down NOW!
Sent SIGTERM to all processes
Sent SIGKILL to all processes
Requesting system poweroff
[ 62.855146] imx2-wdt 30280000.watchdog: Device shutdown: Expect reboot!
[ 62.862470] reboot: Power down poweroff コマンドを使用せずに安全に終了できるかは、3G/LTE モジュールを搭載しているかによっても変わります。
3G/LTE モジュールが搭載されていない場合
Podman コンテナの保存先が tmpfs であり、eMMC への書き込みを行っていない場合は、poweroff コマンドを使用せずに電源を切断することが可能です。 Podman コンテナの保存先が eMMC の場合や、頻繁に rootfs 等の eMMC にあるボリュームを変更するような開発段階においては、poweroff コマンドを実行し、「reboot: Power down」と表示されたのを確認してから電源を切断してください。
3G/LTE モジュールが搭載されている場合
3G/LTE モジュールは poweroff 時にシャットダウン処理を行いますので、3G/LTE モジュールが搭載されている Armadillo-IoT ゲートウェイ G4 の場合は、電源を切断する前に必ず poweroff コマンドを実行し、「reboot: Power down」と表示されたのを確認してから電源を切断してください。 コンソールを確認できない環境で、スイッチなどを使用して電源オフ操作を実施する場合は、電源オフ操作実施後 3G/LTE ステータス確認用 LED (LED20) が消灯されたのを確認してから AC アダプタを抜いてください。3G/LTE ステータス確認用 LED の場所は、 図2.9「インターフェースレイアウト LTEモデル(ケース正面)」 を参照してください。
| |
|---|
haltコマンドで終了させた場合、「reboot: System halted」と表示されてから約128秒後、Armadilloは自動的に再起動します。確実に終了させるためにもpoweroffコマンドを利用してください。 |
| |
|---|
電源を再投入する際は、コンデンサに蓄えられた電荷を抜くため、電源を切断後、一定時間以上待つ必要があります。
開発セット付属のACアダプタの場合に必要な時間は以下のとおりです。 -
DCプラグ側で電源を切断した場合 : 約5秒
-
ACプラグ側で電源を切断した場合 : 約1分
コンデンサに蓄えられた電荷が抜ける前に電源を再投入した場合、
電源シーケンスが守られず、起動しない等の動作不具合の原因となります。 |
Armadillo-IoT ゲートウェイ G4 の開発には、 VSCode を使用します。
開発前に以下の手順を実施して、 ATDE に VSCode 及び、開発用エクステンションとクロスコンパイル用ライブラリをインストールしてください。 以下の手順は全てATDE上で実施します。 ATDE のバージョン v20230123 以上には、 VSCode がインストール済みのため新規にインストールする必要はありませんが、
使用する前には最新版へのアップデートを行ってください。 VSCode を起動するには code コマンドを実行します。 | |
|---|
VSCode を起動すると、日本語化エクステンションのインストールを提案してくることがあります。
その時に表示されるダイアログに従ってインストールを行うと VSCode を日本語化できます。 |
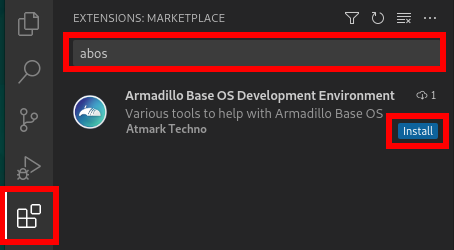
3.3.4.2. VSCode に開発用エクステンションをインストールするVSCode 上でアプリケーションを開発するためのエクステンションをインストールします。 エクステンションはマーケットプレイスからインストールすることができます。
VSCode を起動し、左サイドバーのエクステンションを選択して、検索フォームに「abos」と入力してください。 表示された「Armadillo Base OS Development Environment」の 「Install」ボタンを押すとインストールは完了します。 3.3.4.3. クロスコンパイル用ライブラリをインストールするライブラリのビルドツールを実行する準備として、gitのユーザ名とメールアドレスの設定を行い、
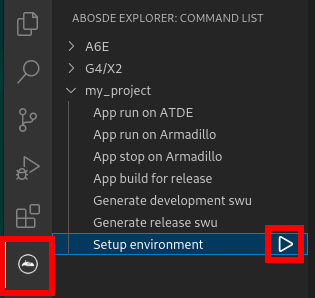
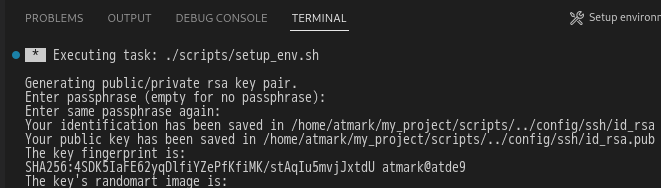
ビルドツールである at-imxlibpackage をインストールします。 その後、ビルドツールを実行します。 実行中にライセンスへの同意を求められます。内容を確認の上、同意する場合は y を入力して処理を進めてください。 実行が完了すると、ATDE にクロスコンパイル用のライブラリがインストールされます。 3.3.5. VSCode を使用して Armadillo のセットアップを行うここでは VSCode を使用した Armadillo のセットアップ方法を紹介します。
VSCode を使用して以下のセットアップを行うことができます。 -
initial_setup.swu の作成
-
at-debian-image と alpine のコンテナイメージをインストールするための SWU ファイルの作成
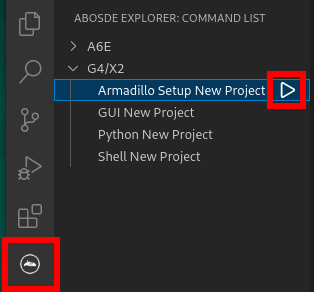
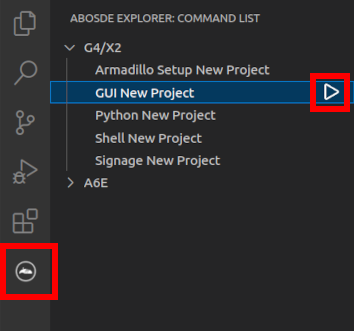
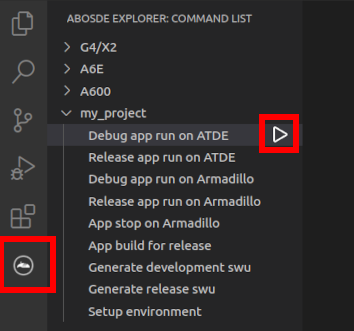
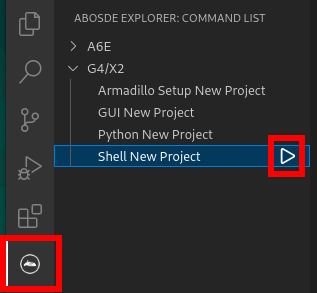
VSCode を起動するには code コマンドを実行します。 VSCode の左ペインの [G4/X2] から [Armadillo Setup New Project] を実行し、表示されるディレクトリ選択画面からプロジェクトを保存する
ディレクトリを選択してください。実行するためには右に表示されている三角形ボタンを押してください。
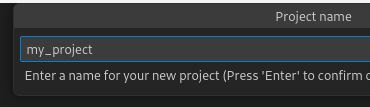
保存先を選択すると、プロジェクト名を入力するダイアログが表示されるので、任意のプロジェクト名を入力してエンターキーを押してください。
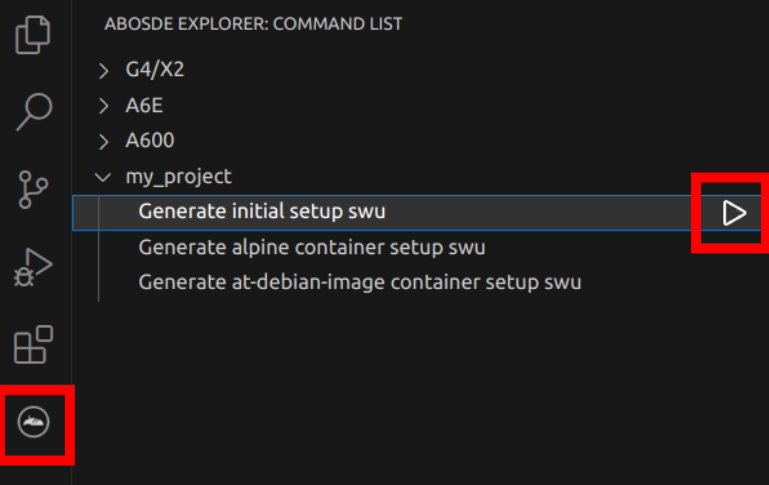
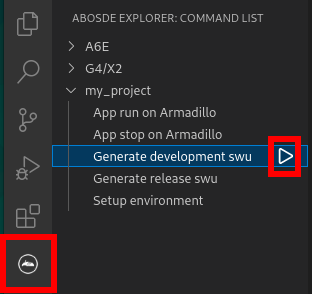
ここでは、ホームディレクトリ直下に my_project として保存しています。 プロジェクト作成後、プロジェクトディレクトリへ移動して VSCode を起動してください。 3.3.5.2. initial_setup.swu の作成initial_setup.swu ファイルの作成を行います。
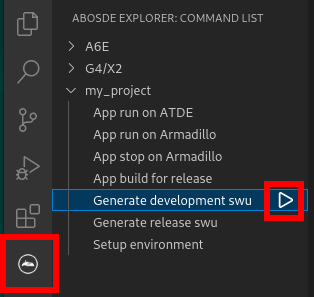
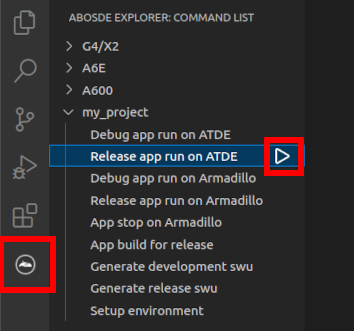
VSCode の左ペインの [my_project] から [Generate initial setup swu] を実行すると、
initial_setup.swu が作成されます。
初回実行時には各種設定の入力を求められます。
入力する設定の内容を 図3.28「initial_setup.swu 初回生成時の各種設定」 に示します。 |
COMMON_NAME には証明鍵の「common name」として会社や製品が分かるような任意の名称を入力してください。
| |
証明鍵を保護するパスフレーズを2回入力します。
| |
swuイメージ自体を暗号化する場合に「y」を入力します。詳細は 「SWUpdate と暗号化について」 を参考にしてください。
| |
アットマークテクノのアップデートをインストールしない場合は「n」を入力します。
| |
rootのパスワードを2回入力します。
| 
|
atmarkユーザーのパスワードを2回入力します。何も入力しない場合はユーザーをロックします。
| 
|
自動アップデートを無効のままで進みます。ここで「y」を入れると、定期的に
アットマークテクノのサーバーからアップデートの有無を確認し、自動的にインストールします。
| 
|
abos-webを使用する場合はパスワードを設定してください。
| 
|
作成したファイルを確認します。「swupdate.aes-key」は暗号化の場合にのみ作成されます。
|
ファイルは my_project/initial_setup/initial_setup.swu に保存されています。
この SWU イメージを 「SWU イメージのインストール」 を参照して Armadillo へインストールしてください。 インストール後に ~/mkswu ディレクトリ以下にある mkswu.conf と、鍵ファイルの swupdate.* をなくさないようにしてください。 アットマークテクノ製品をご利用のユーザーに対して、
購入者向けの限定公開データの提供や大切なお知らせをお届けするサービスなど、
ユーザー登録すると様々なサービスを受けることができます。
サービスを受けるためには、「アットマークテクノ Armadilloサイト」
にユーザー登録をする必要があります。 ユーザー登録すると次のようなサービスを受けることができます。 -
製品仕様や部品などの変更通知の閲覧・配信
-
購入者向けの限定公開データのダウンロード
-
該当製品のバージョンアップに伴う優待販売のお知らせ配信
-
該当製品に関する開発セミナーやイベント等のお知らせ配信
詳しくは、「アットマークテクノ Armadilloサイト」をご覧ください。 ユーザー登録完了後に、購入製品登録することで、「購入者向けの限定公開データ」をダウンロードすることができるようになります。 購入製品登録の詳しい手順は以下のURLをご参照ください。 Armadillo-IoT ゲートウェイ G4の機能拡張や信頼性向上のための設計情報について説明します。 Armadillo-IoT ゲートウェイ G4の各種信頼性試験データを、「アットマークテクノ Armadilloサイト」から
「購入者向けの限定公開データ」としてダウンロード可能ですのでご確認ください。 LVDSインターフェース(CON9)やHDMIインターフェース(CON8)にディスプレイを接続した場合、放射ノイズが問題になる場合があります。放射ノイズを減らすために、以下の対策が効果的です。 Armadillo-IoT ゲートウェイ G4のESD耐性を向上させるために、以下の対策が効果的です。 Armadillo-IoT ゲートウェイ G4に接続されたケーブルが屋外に露出するような設置環境では、
ケーブルに侵入した雷サージ等のストレスによりインターフェース回路が破壊される場合があります。
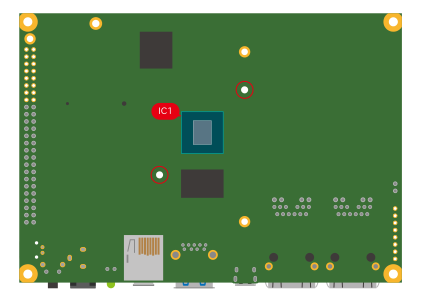
ストレスへの耐性を向上させるには、以下の対策が効果的です。 SoC(基板裏のIC1)の放熱が必要かどうかは、使用状況により違いますので、十分な設計評価の上、ご検討ください。
SoCの表面温度が90℃以上になる場合は、放熱することを推奨いたします。 参考までに、下記条件の場合にSoCの表面温度が90℃を超えることを確認しています。 Armadillo-IoT ゲートウェイ G4の周囲温度の上限は+70℃としていますが、
これは下記条件の場合の温度となります。 オプションケース(金属製)は、SoCの熱をケースに伝導させて放熱する構造で設計しております。
同様の構造でのケース設計をご検討の場合は、「オプションケース(金属製)」をご確認ください。 SoC近辺にヒートシンク固定用の穴(φ2.5mm × 2)を準備していますので、ヒートシンクからの放熱も可能です。
寸法につきましては、「形状図」をご確認ください。 | |
|---|
Armadillo-IoT ゲートウェイ G4では、温度センサーでCPU(Arm Cortex-A53)周辺温度、
SoC(ANAMIX内部)温度を測定することが可能です。
温度センサーの詳細につきましては、「温度センサーの仕様」をご確認ください。 |
Armadillo Base OS には標準で、 CPU や SoC の温度をプロファイリングするソフトウェアが搭載されているので、温度設計にお役立てください。
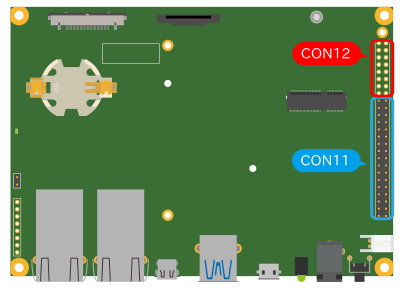
詳細は「動作中の Armadillo の温度を測定する」を参照してください。 3.4.5. CON11、 CON12(拡張インターフェース)CON11、CON12は機能拡張用のインターフェースです。
複数の機能(マルチプレクス)をもつ、i.MX 8M Plusの信号線が接続されており、
USB、GPIO、SPI、UART、CAN、I2C、PWM、I2S、PDM MIC等の機能を拡張することができます。 Armadillo-IoT ゲートウェイ G4 のハードウェアを拡張する際には、主にこの拡張インターフェースに接続していくことになります。 ONOFF信号等の電源制御用の信号も接続されており、
Armadillo-IoT ゲートウェイ G4の電源を外部からの信号により制御することが可能です。
また、電源入出力ピン(VIN)より電源供給することも可能です。 | |
|---|
CON11、CON14、CON15の電源ライン(VIN)は接続されており、同時に電源を供給することはできません。 |
| |
|---|
CON11の5、7ピンとCON9の7、8ピンは同じI2Cバス(I2C4)に接続されています。 |
表3.5 CON11、CON12 搭載コネクタと対向コネクタ例 | 名称 | 型番 | メーカー | 備考 |
|---|
搭載コネクタ | 6130xx21121 [] | Wurth Elektronik | 許容電流 3A(端子1本あたり) | 対向コネクタ | 6130xx21821 [] | Wurth Elektronik | - |
表3.6 CON11 信号配列 | ピン番号 | ピン名 | I/O | 説明 | 電圧グループ |
|---|
1 | VIN | Power | 電源入出力(VIN)、CON14、CON15と共通 | - | 2 | VIN | Power | 電源入出力(VIN)、CON14、CON15と共通 | - | 3 | GND | Power | 電源(GND) | - | 4 | GND | Power | 電源(GND) | - | 5 | I2C4_SCL | In/Out | 拡張入出力、i.MX 8M PlusのI2C4_SCLピン、CON9 7ピンに接続
基板上で4.7kプルアップ | VDD_1V8 | 6 | ECSPI1_MISO | In/Out | 拡張入出力、i.MX 8M PlusのECSPI1_MISOピンに接続 | VDD_1V8 | 7 | I2C4_SDA | In/Out | 拡張入出力、i.MX 8M PlusのI2C4_SDAピン、CON9 8ピンに接続
基板上で4.7kプルアップ | VDD_1V8 | 8 | ECSPI1_MOSI | In/Out | 拡張入出力、i.MX 8M PlusのECSPI1_MOSIピンに接続 | VDD_1V8 | 9 | ECSPI2_MISO | In/Out | 拡張入出力、i.MX 8M PlusのECSPI2_MISOピンに接続 | VDD_1V8 | 10 | ECSPI1_SCLK | In/Out | 拡張入出力、i.MX 8M PlusのECSPI1_SCLKピンに接続 | VDD_1V8 | 11 | ECSPI2_MOSI | In/Out | 拡張入出力、i.MX 8M PlusのECSPI2_MOSIピンに接続 | VDD_1V8 | 12 | ECSPI1_SS0 | In/Out | 拡張入出力、i.MX 8M PlusのECSPI1_SS0ピンに接続 | VDD_1V8 | 13 | ECSPI2_SCLK | In/Out | 拡張入出力、i.MX 8M PlusのECSPI2_SCLKピンに接続 | VDD_1V8 | 14 | SAI3_TXFS | In/Out | 拡張入出力、i.MX 8M PlusのSAI3_TXFSピンに接続 | VDD_1V8 | 15 | ECSPI2_SS0 | In/Out | 拡張入出力、i.MX 8M PlusのECSPI2_SS0ピンに接続 | VDD_1V8 | 16 | SAI3_TXC | In/Out | 拡張入出力、i.MX 8M PlusのSAI3_TXCピンに接続 | VDD_1V8 | 17 | SAI5_RXC | In/Out | 拡張入出力、i.MX 8M PlusのSAI5_RXCピンに接続 | VDD_1V8 | 18 | SAI3_TXD | In/Out | 拡張入出力、i.MX 8M PlusのSAI3_TXDピンに接続 | VDD_1V8 | 19 | SAI5_RXD0 | In/Out | 拡張入出力、i.MX 8M PlusのSAI5_RXD0ピンに接続 | VDD_1V8 | 20 | SAI3_RXD | In/Out | 拡張入出力、i.MX 8M PlusのSAI3_RXDピンに接続 | VDD_1V8 | 21 | SAI5_RXD1 | In/Out | 拡張入出力、i.MX 8M PlusのSAI5_RXD1ピンに接続 | VDD_1V8 | 22 | SAI3_MCLK | In/Out | 拡張入出力、i.MX 8M PlusのSAI3_MCLKピンに接続 | VDD_1V8 | 23 | SAI5_RXD2 | In/Out | 拡張入出力、i.MX 8M PlusのSAI5_RXD2ピンに接続 | VDD_1V8 | 24 | GPIO1_IO15 | In/Out | 拡張入出力、i.MX 8M PlusのGPIO1_IO15ピンに接続 | VDD_1V8 | 25 | SAI5_RXD3 | In/Out | 拡張入出力、i.MX 8M PlusのSAI5_RXD3ピンに接続 | VDD_1V8 | 26 | USBDM_DN2 | In/Out | USB 2.0 データ(-)、USB HUB経由でi.MX 8M PlusのUSB2に接続 | - | 27 | SAI5_MCLK | In/Out | 拡張入出力、i.MX 8M PlusのSAI5_MCLKピンに接続 | VDD_1V8 | 28 | USBDP_DN2 | In/Out | USB 2.0 データ(+)、USB HUB経由でi.MX 8M PlusのUSB2に接続 | - | 29 | SAI5_RXFS | In/Out | 拡張入出力、i.MX 8M PlusのSAI5_RXFSピンに接続 | VDD_1V8 | 30 | VDD_1V8 | Power | 電源出力(VDD_1V8) | - | 31 | VDD_5V | Power | 電源出力(VDD_5V) | - | 32 | VDD_5V | Power | 電源出力(VDD_5V) | - | 33 | GND | Power | 電源(GND) | - | 34 | GND | Power | 電源(GND) | - |
表3.7 CON12 信号配列 | ピン番号 | ピン名 | I/O | 説明 | 電圧グループ |
|---|
1 | PWR_OFF | In/Out | Armadillo Base OSで使用、ユーザーによる変更可能、
i.MX 8M PlusのGPIO1_IO01ピンに接続 | VDD_1V8 | 2 | GPIO2_IO11 | In/Out | 拡張入出力、i.MX 8M PlusのGPIO2_IO11ピンに接続 | VDD_1V8 | 3 | REBOOT | In/Out | Armadillo Base OSで使用、ユーザーによる変更可能、
i.MX 8M PlusのGPIO1_IO05ピンに接続 | VDD_1V8 | 4 | GPIO4_IO27 | In/Out | 拡張入出力、i.MX 8M PlusのGPIO4_IO27ピンに接続 | VDD_1V8 | 5 | ONOFF | In | ONOFF信号[]、i.MX 8M PlusのONOFFピンに接続、基板上で100kプルアップ(NVCC_SNVS_1V8) | NVCC_SNVS_1V8 | 6 | GPIO4_IO28 | In/Out | 拡張入出力、i.MX 8M PlusのSAI3_RXFSピンに接続 | VDD_1V8 | 7 | FW_UPDATE_IND | In/Out | Armadillo Base OSで使用、ユーザーによる変更可能、
i.MX 8M PlusのGPIO1_IO00ピンに接続 | VDD_1V8 | 8 | GPIO4_IO29 | In/Out | 拡張入出力、i.MX 8M PlusのGPIO4_IO29ピンに接続 | VDD_1V8 | 9 | STDWN_IND | In/Out | Armadillo Base OSで使用、ユーザーによる変更可能、
i.MX 8M PlusのGPIO1_IO07ピンに接続 | VDD_1V8 | 10 | GPIO3_IO08 | In/Out | 拡張入出力、i.MX 8M PlusのNAND_DATA02ピンに接続 | VDD_1V8 | 11 | PWR_IND | In/Out | Armadillo Base OSで使用、ユーザーによる変更可能、
i.MX 8M PlusのGPIO1_IO06ピンに接続 | VDD_1V8 | 12 | GPIO3_IO09 | In/Out | 拡張入出力、i.MX 8M PlusのNAND_DATA03ピンに接続 | VDD_1V8 | 13 | GPIO2_IO08 | In/Out | 拡張入出力、i.MX 8M PlusのSD1_DATA6ピンに接続 | VDD_1V8 | 14 | GPIO3_IO14 | In/Out | 拡張入出力、i.MX 8M PlusのNAND_DQSピンに接続 | VDD_1V8 | 15 | GND | Power | 電源(GND) | - | 16 | GND | Power | 電源(GND) | - |
Armadillo-IoT ゲートウェイ G4の拡張インターフェース(CON11、CON12)には、
複数の機能をもった信号線が接続されており、様々な機能拡張が可能です。 拡張インターフェースに接続する基板を設計する際の制限事項について、説明します。 Armadillo-IoT ゲートウェイ G4では、表2.2「仕様」の拡張インターフェースの欄にあるとおりの機能が拡張できます。
ただし、ここに記載の拡張数は、優先的に機能を割り当てた場合の最大数ですので、必要な機能がすべて実現できるかは、
『Armadillo-IoT ゲートウェイ G4 マルチプレクス表』で検討する必要があります。 マルチプレクス表では、各ピンに割り当て可能な機能の他に、リセット後の信号状態、プルアップ/ダウン抵抗の有無等の情報を確認することができます。 各機能の詳細な仕様が必要な場合は、NXP Semiconductorsのホームページからダウンロード可能な、
『i.MX 8M Plus Applications Processor Reference Manual』、『i.MX 8M Plus Applications Processor Datasheet for Industrial Products』をご確認ください。
Armadillo-IoT ゲートウェイ G4固有の情報を除いて、回路設計に必要な情報はこれらのマニュアルに、すべて記載されています。
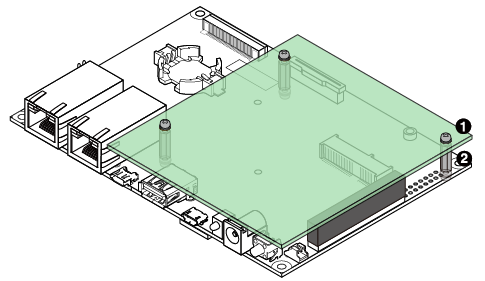
検索しやすいように、マルチプレクス表や「CON11、 CON12(拡張インターフェース)」にi.MX 8M Plusのピン名やコントローラー名を記載しておりますので、是非ご活用ください。 Armadillo-IoT ゲートウェイ G4の拡張ボードを設計する際の推奨形状は図3.31「Armadillo-IoT ゲートウェイ G4の拡張ボード例」のとおりです。
拡張ボード側にピンソケットを実装してArmadillo-IoT ゲートウェイ G4と接続します。 一般的なピンソケットを実装した場合、嵌合高さは約11mmとなります。LANコネクタの高さは13.5mmですので、
LANコネクタの上に基板を重ねることはできません。 拡張ボード固定用に、φ2.3mmの穴を3箇所用意しており、M2のスペーサーとねじを接続可能です。 -

-
なべ小ねじ、ワッシャ、スプリングワッシャ付(M2、L=6mm) × 6
-

-
金属スペーサ(M2、L=11mm) × 3
基板の詳細寸法につきましては、「基板形状図」をご確認ください。 拡張インターフェース(CON11、CON12)を使用する際の参考回路を紹介します。 | |
|---|
参考回路は動作を保証するものではありません。
実際のアプリケーションで十分な評価をお願いいたします。 |
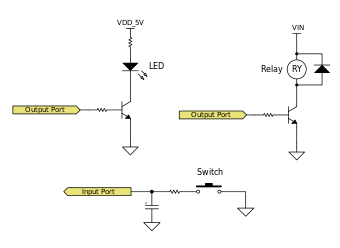
スイッチやLED、リレーを拡張する場合は、GPIOを割り当てます。
GPIOに割り当て可能なピンは多数ありますので、
プルアップ/プルダウン抵抗の有無と電圧レベルを確認して、使用するピンを決定してください。 拡張インターフェースには、i.MX 8M Plusの信号線が直接接続されています。
静電気等による内部回路の故障を防ぐため、スイッチとi.MX 8M Plusの間に、
電流制限抵抗等を接続することをおすすめします。 LED、リレーはGPIOピンで直接駆動せずにトランジスタ等を経由して駆動してください。 拡張インターフェース(CON11)から拡張ボード用に、12V電圧(VIN)、5V電源(VDD_5V)、1.8V電源(VDD_1V8)を出力しています。
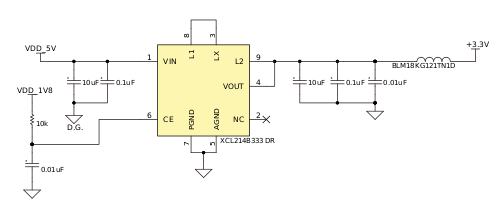
その他の電源が必要な場合は、別途外部から入力するか、DC/DCコンバータ、LDO等で生成してください。
電源シーケンス、出力電流につきましては、「電源回路の構成」をご確認ください。 図6.226「電源回路の構成」のインターフェース名(LVDS I/F等)の左横にはコネクタもしくはノイズフィルタの定格電流値を最大値として記載しています。
また、パワースイッチの下には、パワースイッチの制限電流値を最大値として記載しています。
スイッチングレギュレータの供給能力を超えてしまうため、インターフェースすべての最大値まで電流供給することはできません。
それぞれのインターフェースへの推奨の電流供給値は以下のとおりです。 表3.8 各インターフェースへの電流供給例 | 部品番号 | インターフェース名 | 電圧グループ | 電流値 |
|---|
CON4 | USBインターフェース | USB1_VBUS | 900mA | CON9 | LVDSインターフェース | VIN | 入力電源に依存 | VDD_1V8 | 500mA | CON10 | MIPI-CSIインターフェース | VEXT3V3 | 500mA | CON11 | 拡張インターフェース | VIN | 入力電源に依存 | VDD_5V | 1A | VDD_1V8 | 500mA |
| |
|---|
動作させるアプリケーションにより、内部で消費する電流値は大きく変わりますので、動作検証の上、供給電源の設計を行なってください。 |
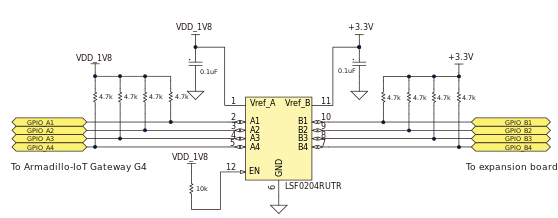
拡張インターフェース(CON11、CON12)の拡張入出力ピンの電圧レベルは1.8V(VDD_1V8)です。
異なる電圧レベルのデバイスを接続する場合は、レベル変換が必要となります。
CON11にはVDD_1V8、VDD_5Vピンがありますので、適宜ご活用ください。
レベル変換ICは、立ち上がり、立ち下がり速度、遅延時間、ドライブ能力等を考慮し、
適切なものを選定してください。 | |
|---|
上記レベル変換ICは1.8V ←→ 5Vでも使用可能です。 |
3.5. Device Treeをカスタマイズするat-dtweb を利用して Device Tree をカスタマイズする方法を説明します。
at-dtweb では、 Web ブラウザ上のマウス操作でDevice Tree のファイルを生成することができます。
カスタマイズの対象は拡張インターフェース(CON11、CON12)です。 3.5.1. Linux カーネルソースコードの取得at-dtweb を使用するためには、予めLinux カーネルのソースコードを用意しておく必要があります。 | |
|---|
at-dtweb が必要とするのは Linux カーネルソースコード内の dts(Device Tree Source)ファイルと Makefile であり、Linux カーネルイメージのビルドをする必要はありません。
そのため、ここでは Linux カーネルのビルドは行いません。 Linux カーネルのビルド手順については、「Linux カーネルをビルドする」を参照してください。 |
Armadillo-IoT ゲートウェイ G4 Linuxカーネル から
「Linuxカーネル」ファイル (linux-at-x2-[VERSION].tar) をダウンロードして、次のコマンドを実行します。 [ATDE ~]$ tar xf linux-at-x2-[VERSION].tar
[ATDE ~]$ tar xf linux-at-x2-[VERSION]/linux-[VERSION].tar.gz
[ATDE ~]$ cd linux-[VERSION] 次のコマンドを実行して、デフォルトコンフィギュレーションを適用しておきます。 [ATDE ~/linux-[VERSION]]$ make ARCH=arm64 CROSS_COMPILE=aarch64-linux-gnu- x2_defconfig ATDE9 に at-dtweb パッケージをインストールします。 [ATDE ~]$ sudo apt update
[ATDE ~]$ sudo apt install at-dtweb インストール済みの場合は、以下のコマンドを実行し最新版への更新を行ってください。 [ATDE ~]$ sudo apt update
[ATDE ~]$ sudo apt upgrade
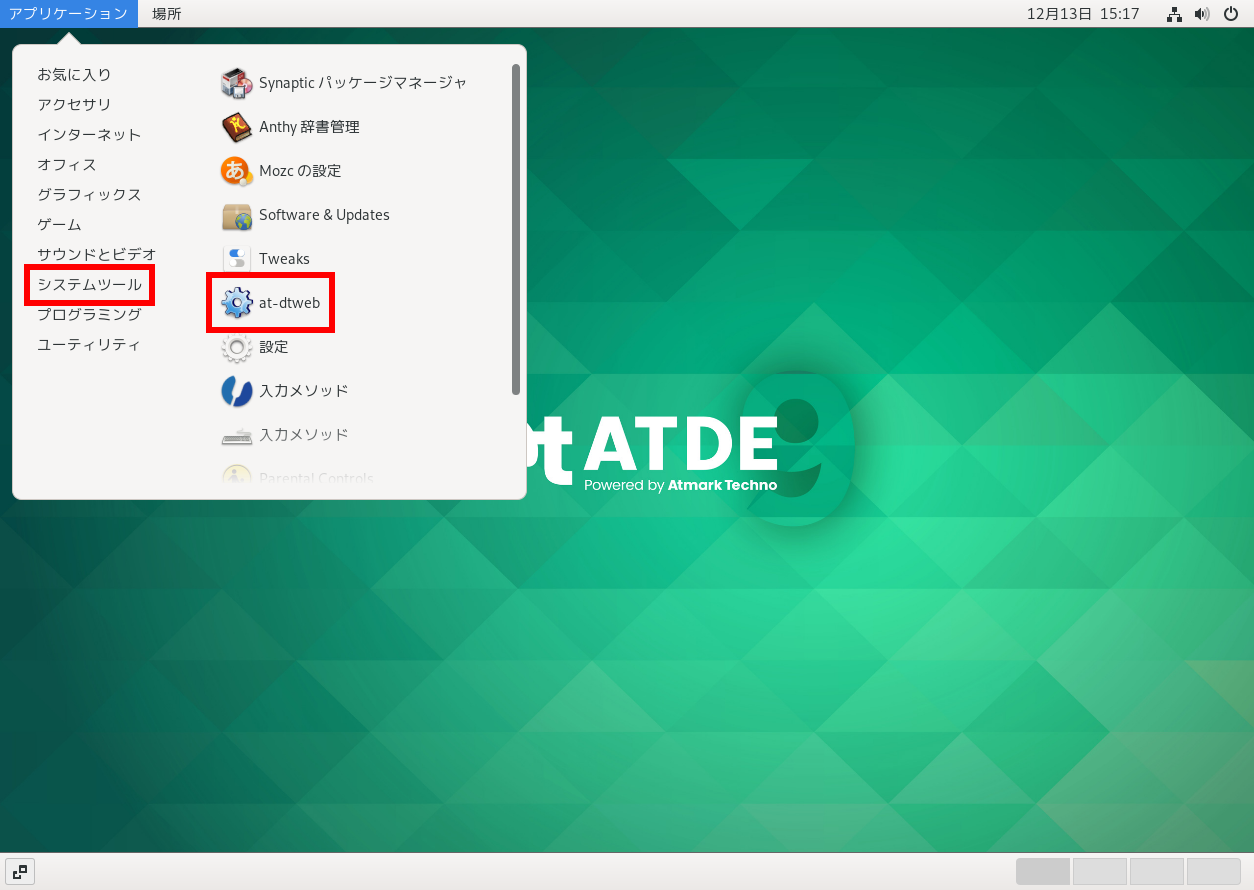
at-dtweb の起動開始
at-dtweb の起動を開始するには、デスクトップ左上のアプリケーションの「システムツール」から「at-dtweb」を選択してください。
コマンドライン上からでも、at-dtweb コマンドで起動できます。 [ATDE ~]$ at-dtweb
ボードの選択
ボードを選択します。Armadillo-IoT_G4 を選択して、「OK」をクリックします。
Linux カーネルディレクトリの選択
Linux カーネルディレクトリを選択します。「Linux カーネルソースコードの取得」で準備した Linux カーネルディレクトリを選択して、「OK」をクリックします。
| |
|---|
at-dtweb のバージョン が 2.7.0 以降の場合は、
Linux カーネルソースのバージョン v5.10.112-r0 以降を、
mkswu のバージョンは 3.15.at.6 以降を使用してください。 at-dtweb と mkswu のバージョンは以下のコマンドで調べることができます。 [ATDE ~]$ ~/mkswu/at-dtweb$ dpkg -l at-dtweb mkswu
要望=(U)不明/(I)インストール/(R)削除/(P)完全削除/(H)保持
| 状態=(N)無/(I)インストール済/(C)設定/(U)展開/(F)設定失敗/(H)半インストール/(W)トリガ待ち/(T)トリガ保留
|/ エラー?=(空欄)無/(R)要再インストール (状態,エラーの大文字=異常)
||/ 名前 バージョン アーキテクチ 説明
+++-==============-============-============-=============================================
ii at-dtweb 2.7.0 all Device Tree editor for Atmark Techno products
ii mkswu 3.15.at.6-1 all build SWU images for armadillo base OS |
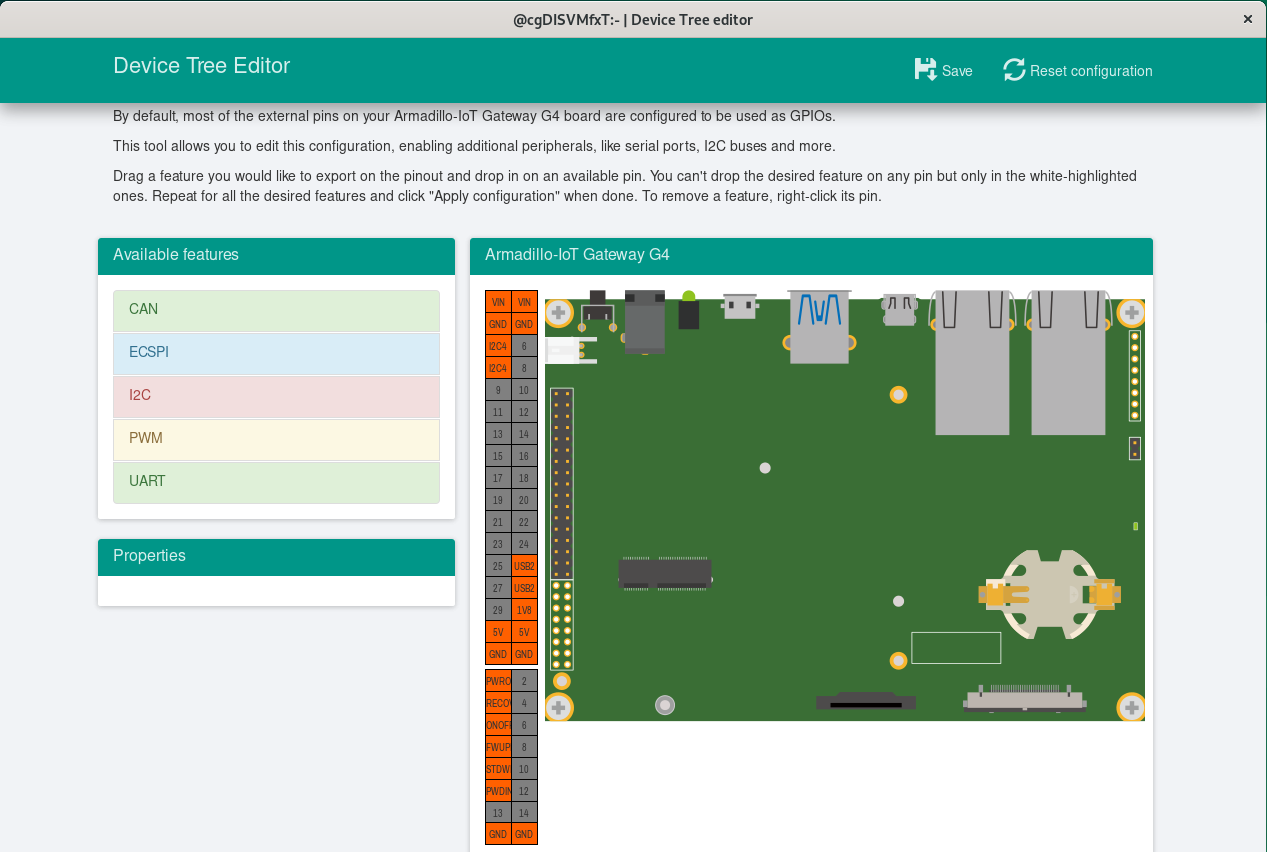
at-dtweb の起動完了
at-dtweb が起動し、次のように画面が表示されます。
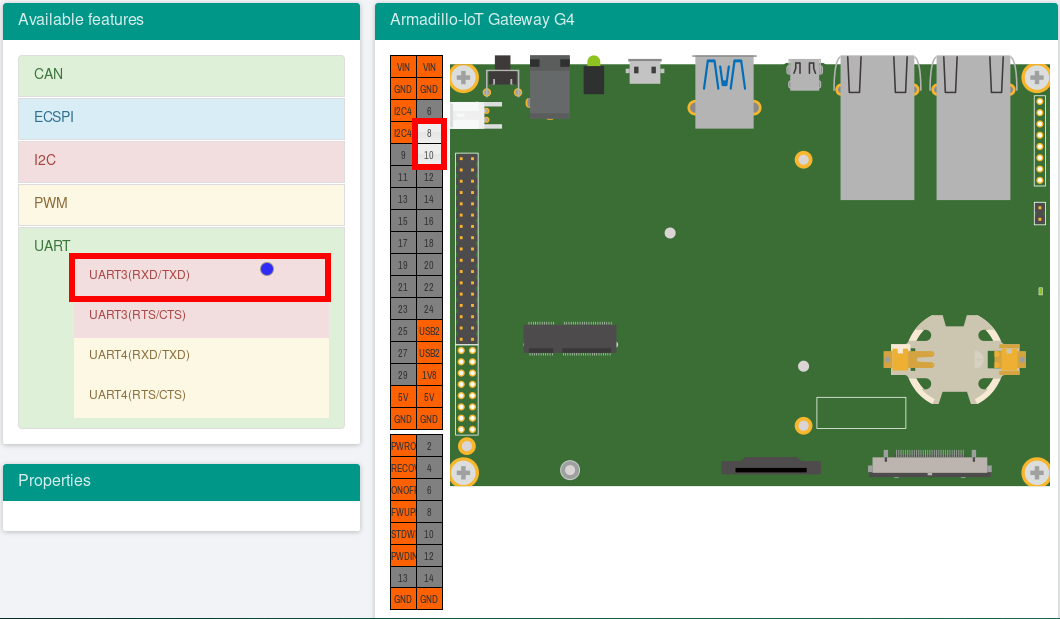
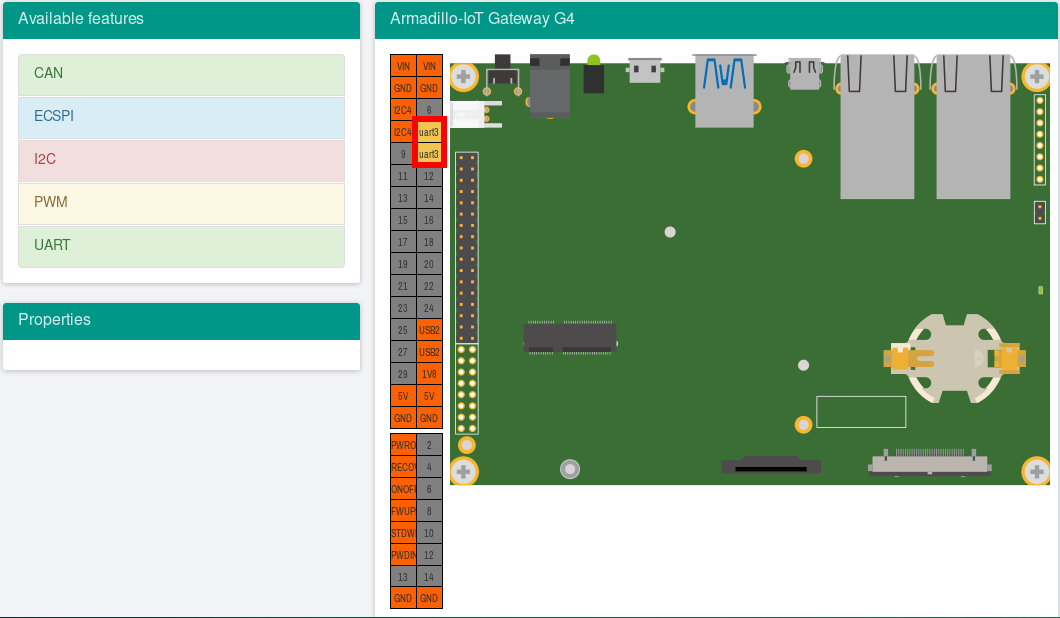
3.5.4. Device Tree をカスタマイズ機能の選択は、ドラッグ&ドロップで行います。画面左上の「Available features」から有効にしたい機能をドラッグし、画面右側の「Armadillo-IoT Gateway G4」の白色に変化したピンにドロップします。例として CON11 8/10 ピンを UART3(RXD/TXD) に設定します。 | |
|---|
何も機能が選択されていないピンには GPIO の機能が割り当てられます。 |
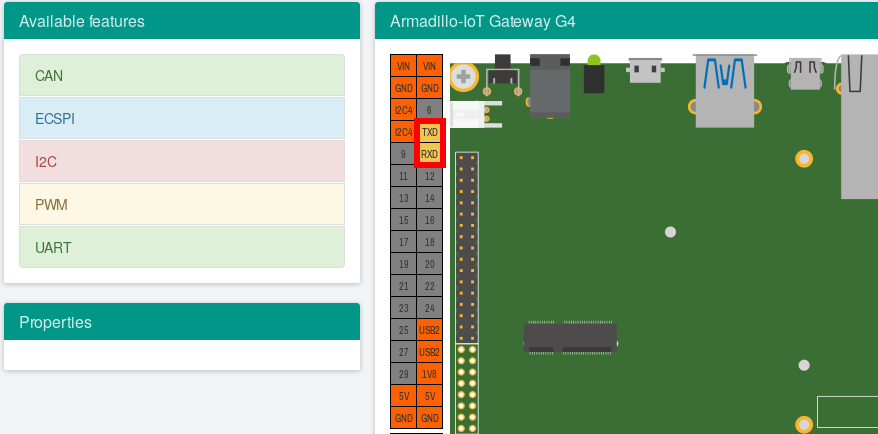
画面右側の「Armadillo-IoT Gateway G4」にドロップして設定したピンを左クリックすると信号名が表示されます。
どのピンがどの信号に対応しているのかを確認することができます。 例として UART3(RXD/TXD) の信号名を確認します。 | |
|---|
再度ピンを左クリックすると機能名の表示に戻ります。 |
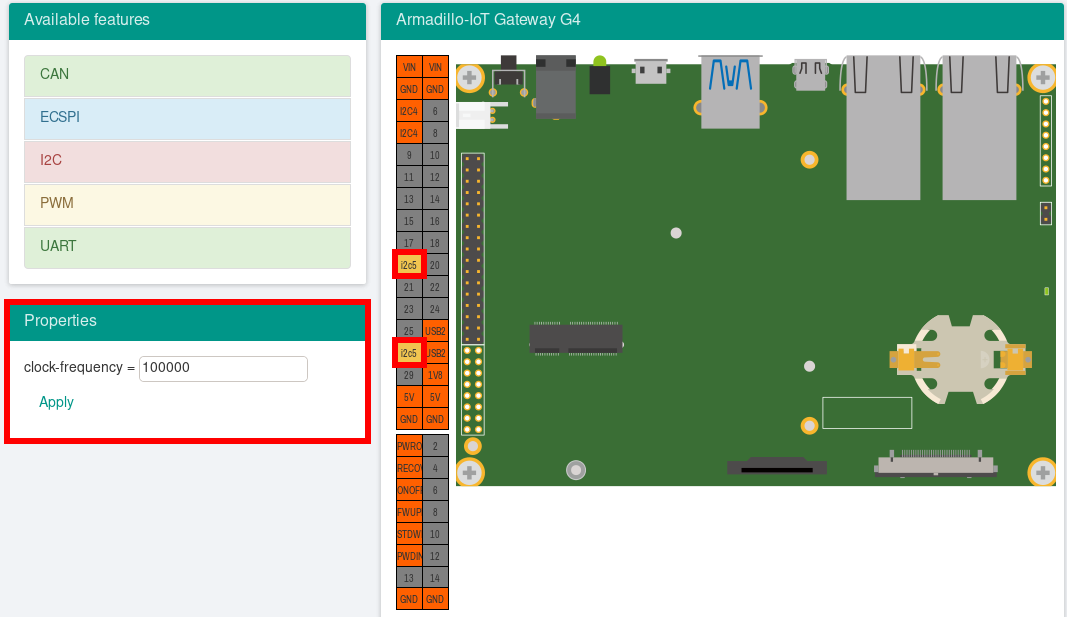
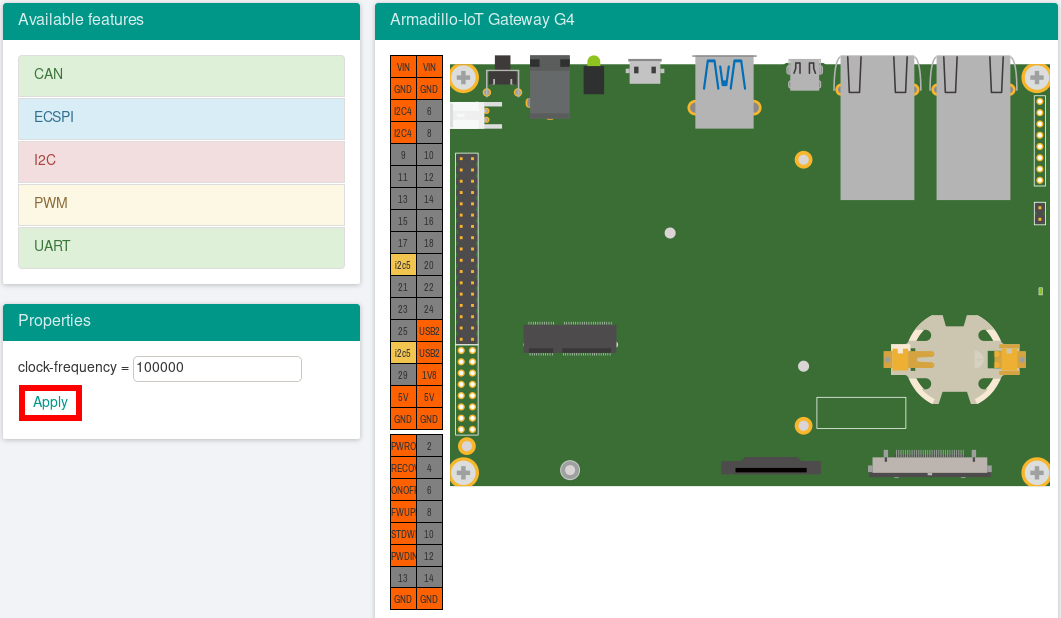
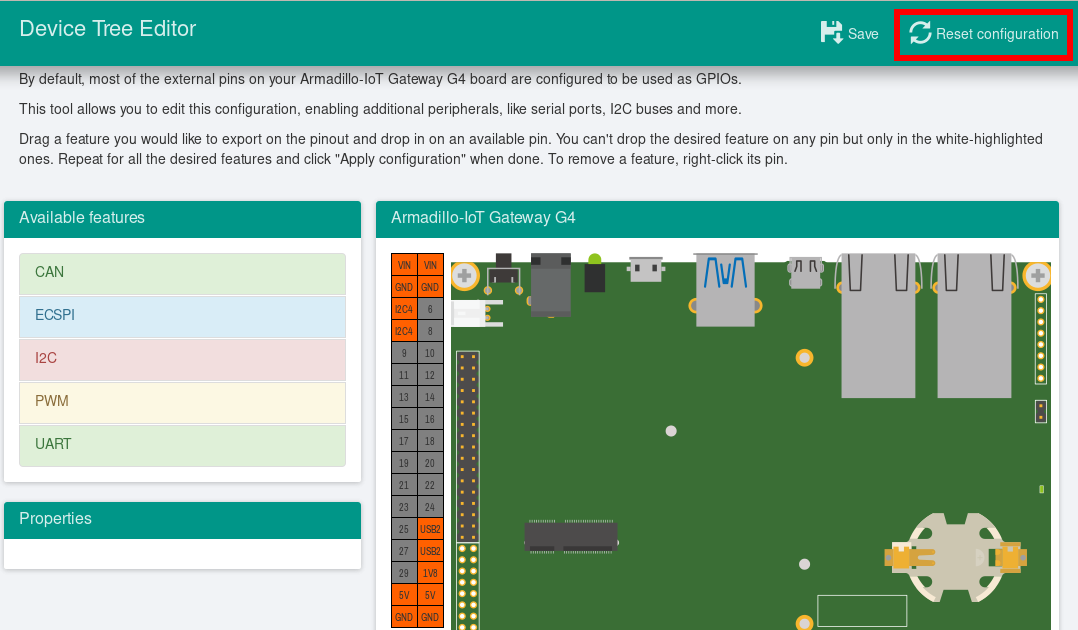
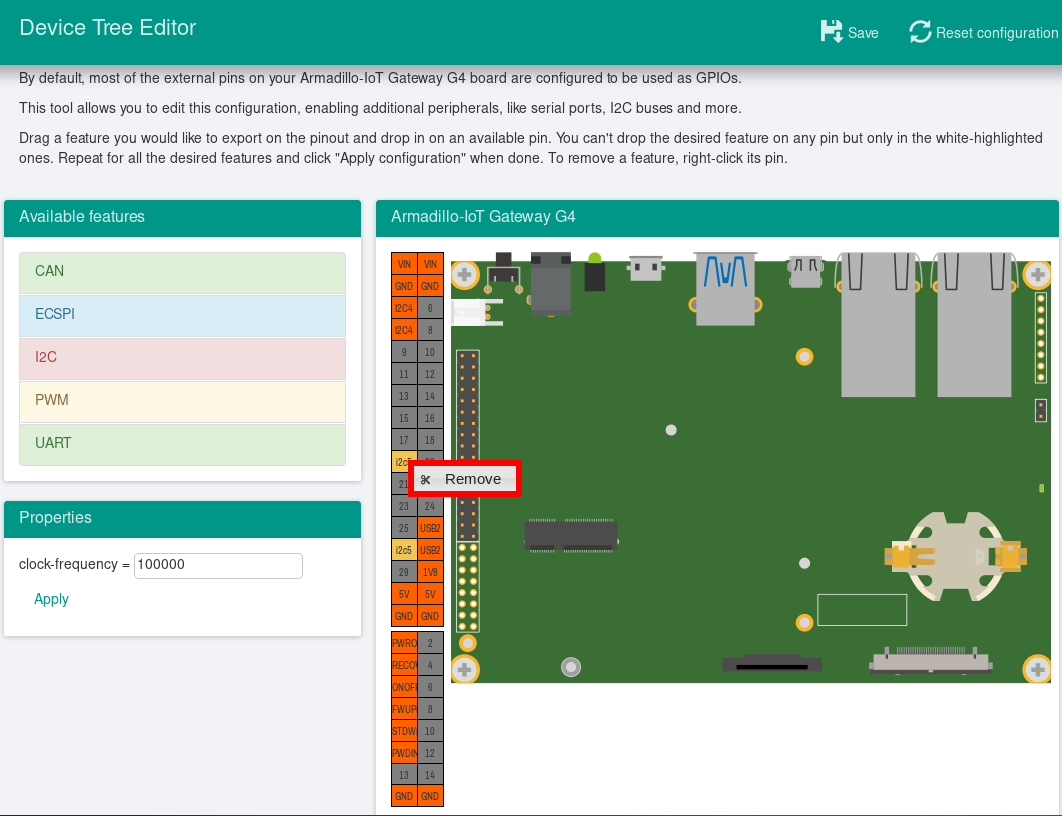
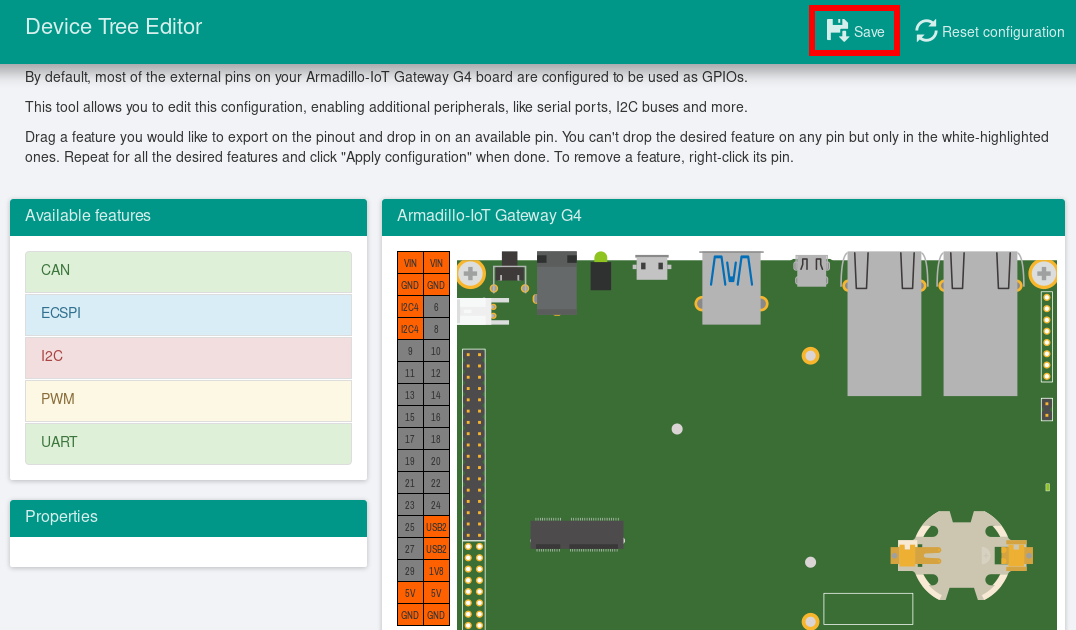
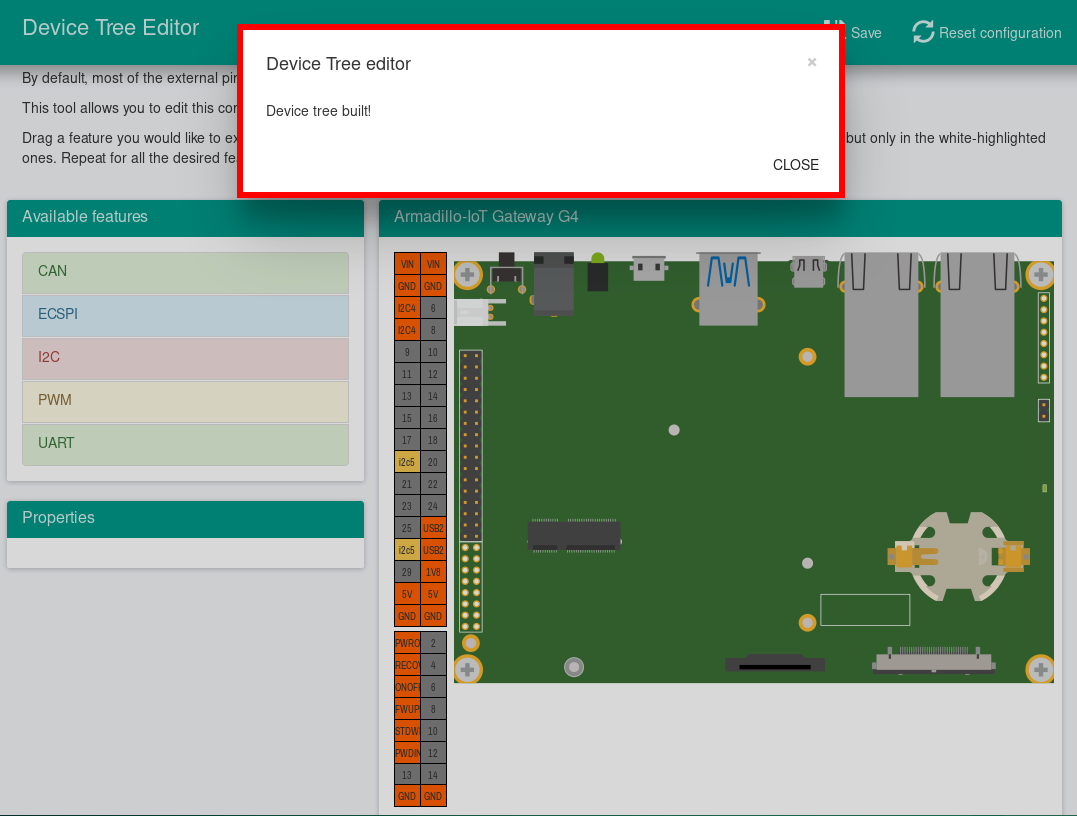
いくつかの機能にプロパティを設定することができます。画面右側の「Armadillo-IoT Gateway G4」に選択した機能を左クリックすると、画面左下の「Properties」からプロパティを選択することができます。 例としてCON11 19/27 ピンの I2C5(SCL/SDA) の clock_frequency プロパティを設定します。 設定したプロパティを確定させるには「Apply」をクリックします。 全ての機能を削除する場合は、画面右上の「Reset configuration」をクリックします。機能ごとに削除する場合は、画面右側の「Armadillo-IoT Gateway G4」のピンを右クリックして「Remove」をクリックします。 3.5.4.5. Device Tree のファイルの生成Device Tree のファイルを生成するには、画面右上の「Save」をクリックします。 at-dtweb のバージョンによって Device Tree のファイル生成の完了画面が異なります。 以下の画面ようなメッセージが表示されると、DTS および DTB の生成は完了です。 ビルドが終了すると、arch/arm64/boot/dts/freescale 以下に DTS/DTB が作成されています。 [ATDE ~/linux-5.10]$ ls arch/arm64/boot/dts/freescale/armadillo_iotg_g4-expansion-interface.dtsi
arch/arm64/boot/dts/freescale/armadillo_iotg_g4-expansion-interface.dtsi
[ATDE ~/linux-5.10]$ ls arch/arm64/boot/dts/freescale/armadillo_iotg_g4-at-dtweb.dtb
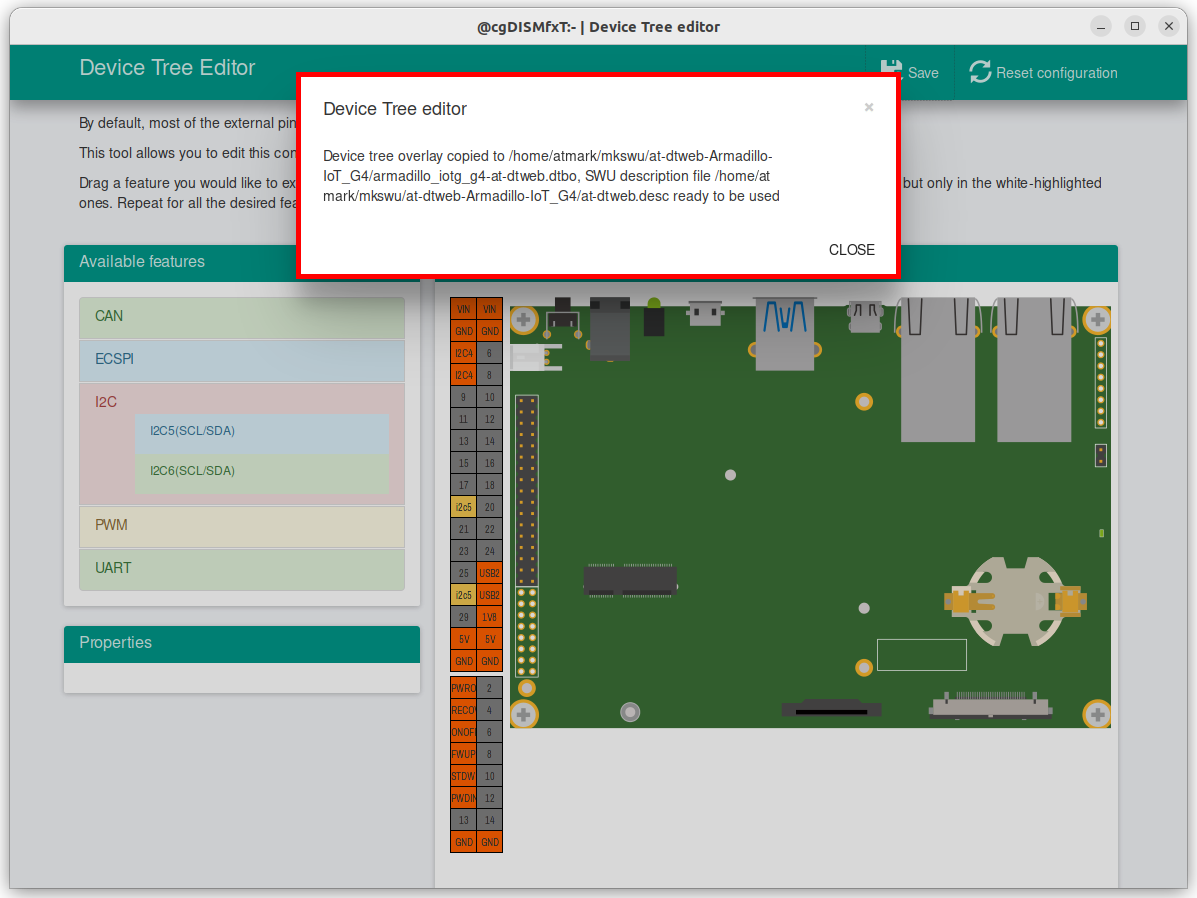
arch/arm64/boot/dts/freescale/armadillo_iotg_g4-at-dtweb.dtb 以下の画面ようなメッセージが表示されると、dtbo ファイルおよび desc ファイルの生成は完了です。 at-dtweb のバージョン 2.7.0 以降では、ビルドが完了するとホームディレクトリ下の mkswu/at-dtweb-Armadillo-IoT_G4
ディレクトリに、DTB overlays ファイル(dtboファイル)と desc ファイルが生成されます。
Armadillo-IoT ゲートウェイ G4 本体に書き込む場合は、mkswu コマンドで desc ファイルから SWU イメージを生成してアップデートしてください。 [ATDE ~]$ ls ~/mkswu/at-dtweb-Armadillo-IoT_G4
armadillo_iotg_g4-at-dtweb.dtbo at-dtweb.desc.old update_preserve_files.sh
at-dtweb.desc update_overlays.sh
[ATDE ~]$ cd ~/mkswu/at-dtweb-Armadillo-IoT_G4
[ATDE ~]$ mkswu at-dtweb.desc
Enter pass phrase for /home/atmark/mkswu/swupdate.key:
at-dtweb.swu を作成しました。 |
SWU イメージを生成します。
|
SWU イメージを使ったアップデートの詳細は 「アップデート機能について」 を参照してください。 3.5.5. DT overlay によるカスタマイズDevice Treeは「DT overlay」(dtbo) を使用することでも変更できます。 DT overlay を使用することで、通常の dts の更新が自動的に入りつづける状態で
dts の変更でしかできない設定を行うことができます。 /boot/overlays.txt に fdt_overlays を dtbo 名で設定することで、
u-bootが起動時にその DT overlay を通常の dtb と結合して起動します。
複数の DT overlay を使う場合は以下の例のようにスペースで別けたファイル名を記載することができます。 |
/boot/overlays.txt ファイルに「armadillo_iotg_g4-sw1-wakeup.dtbo」を追加します。
ファイルが存在しない場合は新規に作成してください。
このファイルの詳細については 「DT overlay によるカスタマイズ」 を参照してください。
| |
/boot/overlays.txt を保存し、アップデートの場合でも保存します。
| |
overlay の実行のために再起動します。
| |
シリアルコンソールの場合に、u-bootによるメッセージを確認できます。
| |
Linux からも「nousb」overlay の確認ができます。USB の regulator を無効にしたため、
USB を使えないようになりました。
| |
sw1-wakeupも有効になっていることを確認できます。
|
3.5.5.1. 提供している DT overlay以下の DT overlay を用意しています: -
armadillo_iotg_g4-nousb.dtbo: USB の電源を切ります。
-
armadillo_iotg_g4-sw1-wakeup.dtbo: SW1 の起床要因を有効にします。
-
armadillo_iotg_g4-con10-arducam.dtbo: arducam カメラを MIPI CSI-2 で接続する場合にご使用ください。
-
armadillo_iotg_g4-con10-imx219.dtbo: Raspberry Pi 向けの imx219 カメラを MIPI CSI-2 で接続する場合にご使用ください。
-
armadillo_iotg_g4-con10-ox01f10.dtbo: OMNIVISION の OX01F10 カメラを MIPI CSI-2 で接続する場合にご使用ください。
-
armadillo_iotg_g4-lte-ext-board.dtbo: LTE モデルで自動的に使用します。
3.5.5.2. カスタマイズした DT overlay の作成at-dtweb では対応できない変更を行いたい場合にカスタマイズした DT overlay を作成することでができます。 overlay を使用することで、今後のアップデートで overlay される側の dts に変更があっても自動的に適用され続けます。 -
「Linux カーネルをビルドする」 を参照して、カーネルのソースコードを取得します。
-
ソースディレクトリの
arch/arm64/boot/dts/freescale/armadillo_iotg_g4-customize.dts を編集します。
-
make ARCH=arm64 CROSS_COMPILE=aarch64-linux-gnu- dtbs で DT overlay をビルドします。
-
arch/arm64/boot/dts/freescale/armadillo_iotg_g4-customize.dtbo ファイルを Armadillo の /boot に配置し、/boot/overlays.txt に記載します。
|
取得したカーネルのソースディレクトリに入ります。
| |
dts ファイルを編集します。この例では pwm2 を SPDIF_RX (CON9.28) ピンを有効にします。
| |
DT overlay をビルドします。
| |
ビルドされたファイルを Armadillo にコピーします。この例では scp を使いましたが、USBドライブでのコピーや SWUpdate でも可能です。
| |
overlays.txt にこの DT overlay をロードするように記載します。
| |
ファイルを永続化します。DT overlay は swupdate_preserve_files のデフォルトには記載されていないため、SWUpdate で更新する場合は必ず swupdate_preserve_files も更新してください。
| |
再起動して、u-boot の出力で DT overlay がロードされてることを確認します。
|
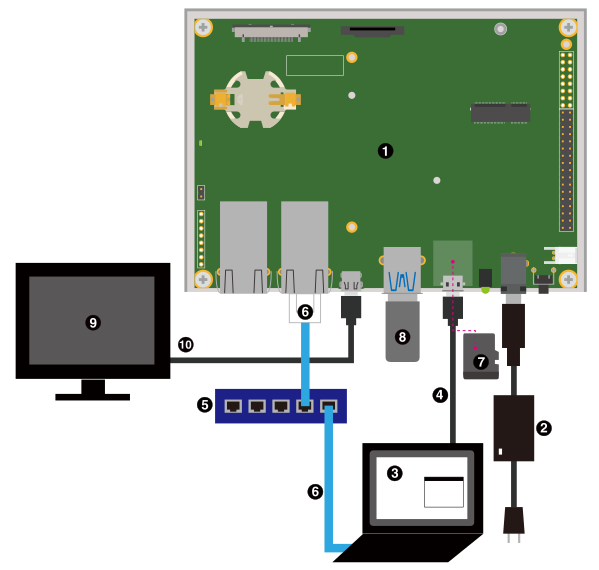
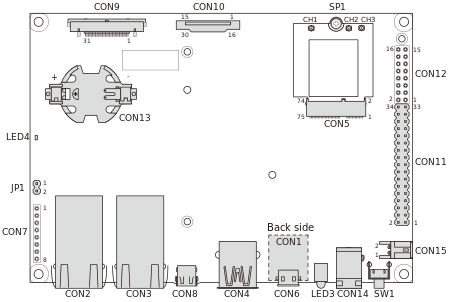
3.6. インターフェースの使用方法とデバイスの接続方法Armadillo を用いた開発に入る前に、開発するシステムに接続する必要のある周辺デバイスをこのタイミングで接続しておきます。 図3.51「Armadillo-IoT ゲートウェイ G4のインターフェース」にArmadillo-IoT ゲートウェイ G4の各インターフェースの位置を、表3.9「Armadillo-IoT ゲートウェイ G4 インターフェース一覧」に各インターフェースの概要を示します。
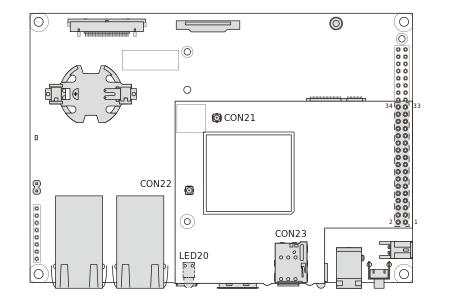
LTEモデルで追加となるインターフェースに関しては、図3.52「Armadillo-IoT ゲートウェイ G4 インターフェース LTEモデル追加分」と表3.10「Armadillo-IoT ゲートウェイ G4 インターフェース一覧 LTEモデル追加分」を
参照してください。 表3.9 Armadillo-IoT ゲートウェイ G4 インターフェース一覧 | 部品番号 | インターフェース名 | 型番 | メーカー |
|---|
CON1 | SDインターフェース | DM3BT-DSF-PEJS | HIROSE ELECTRIC | CON2 | LANインターフェース2 | 56F-1304DYDZ2NL | YUAN DEAN SCIENTIFIC | CON3 | LANインターフェース1 | 56F-1304DYDZ2NL | YUAN DEAN SCIENTIFIC | CON4 | USBインターフェース | GSB3111311HR | Amphenol ICC | CON5 | M.2インターフェース | SM3ZS067U410AER1000 | Japan Aviation Electronics Industry | CON6 | USBコンソールインターフェース | UB-MC5BR3-SD204-4S-1-TB NMP | J.S.T.Mfg. | CON7 | JTAGインターフェース | A2-8PA-2.54DSA(71) | HIROSE ELECTRIC | CON8 | HDMIインターフェース | DC3RX19JA2R1700 | Japan Aviation Electronics Industry | CON9 | LVDSインターフェース | FX15S-31S-0.5SH | HIROSE ELECTRIC | CON10 | MIPI-CSIインターフェース | 1-1734248-5 | TE Connectivity | CON11 | 拡張インターフェース1 | 61303421121 | Wurth Elektronik | CON12 | 拡張インターフェース2 | 61301621121 | Wurth Elektronik | CON13 | RTCバックアップインターフェース | BU2032SM-FH-GTR | Memory Protection Devices | CON14 | 電源入力インターフェース1 | PJ-102AH | CUI | CON15 | 電源入力インターフェース2 | S02B-PASK-2(LF)(SN) | J.S.T.Mfg. | JP1 | 起動デバイス設定ジャンパ | 61300211121 | Wurth Elektronik | SW1 | ユーザースイッチ | SKHHLUA010 | ALPS ELECTRIC | LED3 | ユーザーLED | L-710A8CB/1GD | Kingbright Electronic | LED4 | 電源LED | SML-D12M8WT86 | ROHM | SP1 | M.2用スタッド | SM3ZS067U410-NUT1-R1200 | Japan Aviation Electronics Industry |
表3.10 Armadillo-IoT ゲートウェイ G4 インターフェース一覧 LTEモデル追加分 | 部品番号 | インターフェース名 | 型番 | メーカー |
|---|
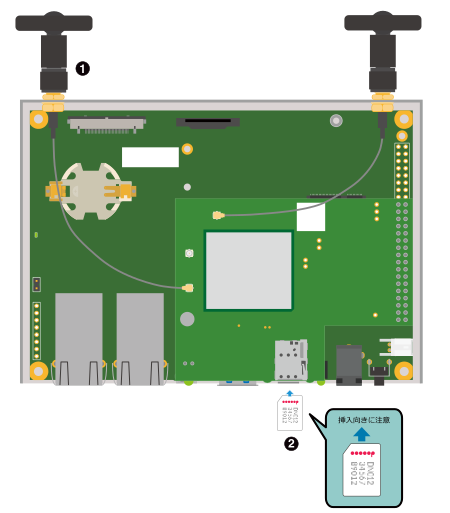
CON21 | 3G/LTEアンテナインターフェース1 | U.FL-R-SMT-1 | HIROSE ELECTRIC | CON22 | 3G/LTEアンテナインターフェース2 | U.FL-R-SMT-1 | HIROSE ELECTRIC | CON23 | nanoSIMインターフェース | SF72S006VBDR2500 | Japan Aviation Electronics Industry | LED20 | 3G/LTEステータス確認用LED | L-1384AD/1GD | Kingbright Electronic |
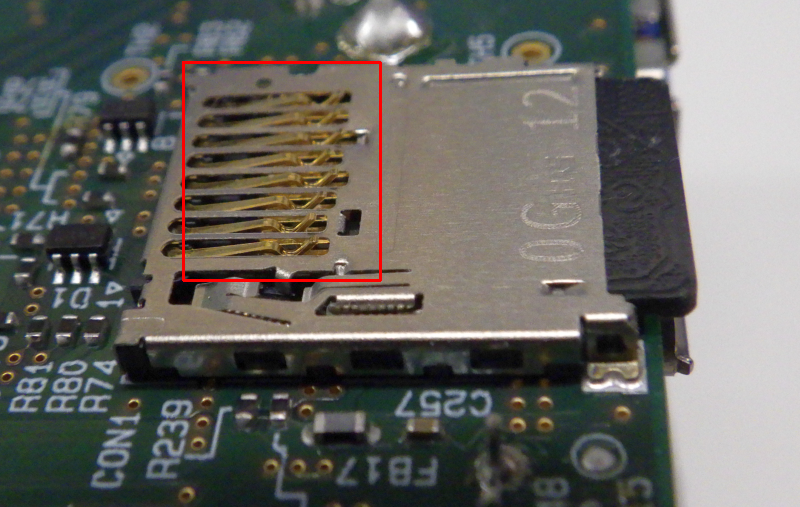
以下では、各デバイスの接続方法、仕様及び使用方法について紹介していきます。 以下の説明では、共通の操作が可能な場合に、 microSD/microSDHC/microSDXC カードを microSD カードと表記します。 Armadillo-IoT ゲートウェイ G4のSDホストは、i.MX 8M PlusのuSDHC(Ultra Secured Digital Host Controller)を利用しています。 Armadillo-IoT ゲートウェイ G4では、SDインターフェース(CON1)がuSDHC2を利用しています。 -
機能
-
カードタイプ: microSD/microSDHC/microSDXC/microSDIO
-
バス幅: 1bit or 4bit
-
スピードモード: Default Speed(26MHz), High Speed(52MHz), UHS-I (50MHz)
-
カードディテクトサポート
| |
|---|
スピードモードがUHS-Iモードで動作した場合、
VCCI ClassB規格準拠のため、SDカードの対応スピードがDDR50(最大クロック50MHz)に制限されます。 |
-
インターフェース仕様
CON1はUHS-Iに対応したSDインターフェースです。
信号線はi.MX 8M PlusのSDホストコントローラ(uSDHC2)に接続されています。 表3.11 CON1 信号配列 | ピン番号 | ピン名 | I/O | 説明 |
|---|
1 | SD_DAT2 | In/Out | SDデータバス(bit2)、i.MX 8M PlusのSD2_DATA2ピンに接続 | 2 | SD_DAT3 | In/Out | SDデータバス(bit3)、i.MX 8M PlusのSD2_DATA3ピンに接続 | 3 | SD_CMD | In/Out | SDコマンド/レスポンス、i.MX 8M PlusのSD2_CMDピンに接続 | 4 | VDD_SD | Power | 電源出力(VDD_SD) | 5 | SD_CLK | Out | SDクロック、i.MX 8M PlusのSD2_CLKピンに接続 | 6 | GND | Power | 電源(GND) | 7 | SD_DAT0 | In/Out | SDデータバス(bit0)、i.MX 8M PlusのSD2_DATA0ピンに接続 | 8 | SD_DAT1 | In/Out | SDデータバス(bit1)、i.MX 8M PlusのSD2_DATA1ピンに接続 | - | SD_CD | In | SDカード検出、i.MX 8M PlusのSD2_CD_Bピンに接続
(Low: カード挿入、High: カード未挿入) |
| |
|---|
microSDカードを挿入すると、スロット内部の端子が飛び出します。
引っかける等で破損する可能性がございますので、取り扱いにはご注意ください。
|
ここでは、 sd_example という名称の alpine ベースのコンテナを作成し、その中で microSD カードを使用します。
必要なコンテナイメージは予め podman pull している前提で説明します。 CON1 に microSD カードを挿入してください。 /etc/atmark/containers/sd_example.conf というファイルを以下の内容で作成します。 set_image docker.io/alpine
add_hotplugs mmc
add_args --cap=SYS_ADMIN
set_command sleep infinity |
add_hotplugs に mmc を指定することで、 コンテナ内でmicroSD カードをホットプラグで認識します
| |
コンテナ内で microSD カードをマウントするための権限を与えます
|
コンテナを起動し、コンテナの中に入ります。 [armadillo]# podman_start sd_example
Starting 'sd_example'
1d93ecff872276834e3c117861f610a9c6716c06eb95623fd56aa6681ae021d4
[armadillo]# podman exec -it sd_example sh
[container]# コンテナ内で microSD カードは、 /dev/mmcblk1 として認識されますので /mnt にマウントします。 [container]# mount /dev/mmcblk1p1 /mnt ストレージの使用方法については、「ストレージの操作」もあわせて参照してください。 Armadillo-IoT ゲートウェイ G4のEthernet(LAN)は、i.MX 8M PlusのENET(Ethernet MAC)およびENET_QOS(Ethernet Quality Of Service)を利用しています。 Armadillo-IoT ゲートウェイ G4では、LANインターフェース1(CON3)がENETを、LANインターフェース2(CON2)がENET_QOS利用しています。 | |
|---|
LANインターフェース2(CON2)は10Mbps(10BASE-T)に非対応です。10Mbpsで通信を行う場合は、LANインターフェース1(CON3)をご利用ください。 |
-
機能
-
通信速度: 1000Mbps(1000BASE-T), 100Mbps(100BASE-TX), 10Mbps(10BASE-T)
-
通信モード: Full-Duplex(全二重), Half-Duplex(半二重) []
-
Auto Negotiationサポート
-
キャリア検知サポート
-
リンク検出サポート
-
インターフェース仕様(CON2)
CON2は100BASE-TX/1000BASE-Tに対応したLANインターフェースです。
カテゴリ5e以上のイーサネットケーブルを接続することができます。
AUTO-MDIX機能を搭載しており、ストレートケーブルまたはクロスケーブルを自動認識して送受信端子を切り替えます。 信号線はEthenet PHY(KSZ9131RNXI-TR/Microchip Technology)を経由して
i.MX 8M PlusのEthernet Quality Of Service(ENET_QOS)に接続されています。 表3.12 CON2 信号配列 (10BASE-T/100BASE-TX) | ピン番号 | ピン名 | I/O | 説明 |
|---|
1 | LAN2_TX+ | In/Out | 送信データ(+) | 2 | LAN2_TX- | In/Out | 送信データ(-) | 3 | LAN2_RX+ | In/Out | 受信データ(+) | 4 | - | - | - | 5 | - | - | - | 6 | LAN2_RX- | In/Out | 受信データ(-) | 7 | - | - | - | 8 | - | - | - |
表3.13 CON2 信号配列 (1000BASE-T) | ピン番号 | ピン名 | I/O | 説明 |
|---|
1 | LAN2_TRD0+ | In/Out | 送受信データ0(+) | 2 | LAN2_TRD0- | In/Out | 送受信データ0(-) | 3 | LAN2_TRD1+ | In/Out | 送受信データ1(+) | 4 | LAN2_TRD2+ | In/Out | 送受信データ2(+) | 5 | LAN2_TRD2- | In/Out | 送受信データ2(-) | 6 | LAN2_TRD1- | In/Out | 送受信データ1(-) | 7 | LAN2_TRD3+ | In/Out | 送受信データ3(+) | 8 | LAN2_TRD3- | In/Out | 送受信データ3(-) |
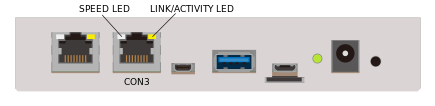
表3.14 CON2 LAN LEDの動作 | 名称 | 状態 | 説明 |
|---|
LANリンクアクティビティLED | 消灯 | リンクが確立されていない | 点灯(黄) | リンクが確立されている | 点滅(黄) | リンクが確立されており、データを送受信している | LANスピードLED | 消灯 | リンクが確立されていない | 点灯(緑) | 100Mbpsで接続されている | 点灯(橙) | 1000Mbpsで接続されている |
-
インターフェース仕様(CON3)
CON3は10BASE-T/100BASE-TX/1000BASE-Tに対応したLANインターフェースです。
カテゴリ5e以上のイーサネットケーブルを接続することができます。
AUTO-MDIX機能を搭載しており、ストレートケーブルまたはクロスケーブルを自動認識して送受信端子を切り替えます。 信号線はEthenet PHY(KSZ9131RNXI-TR/Microchip Technology)を経由して
i.MX 8M PlusのEthernet MAC(ENET)に接続されています。 表3.15 CON3 信号配列 (10BASE-T/100BASE-TX) | ピン番号 | ピン名 | I/O | 説明 |
|---|
1 | LAN1_TX+ | In/Out | 送信データ(+) | 2 | LAN1_TX- | In/Out | 送信データ(-) | 3 | LAN1_RX+ | In/Out | 受信データ(+) | 4 | - | - | - | 5 | - | - | - | 6 | LAN1_RX- | In/Out | 受信データ(-) | 7 | - | - | - | 8 | - | - | - |
表3.16 CON3 信号配列 (1000BASE-T) | ピン番号 | ピン名 | I/O | 説明 |
|---|
1 | LAN1_TRD0+ | In/Out | 送受信データ0(+) | 2 | LAN1_TRD0- | In/Out | 送受信データ0(-) | 3 | LAN1_TRD1+ | In/Out | 送受信データ1(+) | 4 | LAN1_TRD2+ | In/Out | 送受信データ2(+) | 5 | LAN1_TRD2- | In/Out | 送受信データ2(-) | 6 | LAN1_TRD1- | In/Out | 送受信データ1(-) | 7 | LAN1_TRD3+ | In/Out | 送受信データ3(+) | 8 | LAN1_TRD3- | In/Out | 送受信データ3(-) |
表3.17 CON3 LAN LEDの動作 | 名称 | 状態 | 説明 |
|---|
LANリンクアクティビティLED | 消灯 | リンクが確立されていない | 点灯(黄) | リンクが確立されている | 点滅(黄) | リンクが確立されており、データを送受信している | LANスピードLED | 消灯 | 10Mbpsで接続されている、またはリンクが確立されていない | 点灯(緑) | 100Mbpsで接続されている | 点灯(橙) | 1000Mbpsで接続されている |
-
ネットワークデバイス
-
eth0 (LANインターフェース1)
-
eth1 (LANインターフェース2)
USB ホスト
Armadillo-IoT ゲートウェイ G4のUSBホストは、i.MX 8M PlusのUSB(Universal Serial Bus Controller)およびUSB_PHY(Universal Serial Bus PHY)を利用しています。 Armadillo-IoT ゲートウェイ G4では、USBインターフェース(CON4)がUSB1を利用しています。 -
機能
-
USB specification rev 3.0準拠
-
xHCI(eXtensible Host Controller Interface)互換
-
転送レート: Super-speed(5 Gbps), high-speed(480 Mbps), full-speed(12 Mbps), low-speed(1.5 Mbps)
USB ハブ
Armadillo-IoT ゲートウェイ G4には、Microchip製USB2422が搭載されています。
USB2422は、「CON11、 CON12(拡張インターフェース)」に接続されています。 -
機能
-
USB specification rev 2.0準拠
-
転送レート: high-speed(480 Mbps), full-speed(12 Mbps), low-speed(1.5 Mbps)
-
インターフェース仕様
CON4はUSB 3.0に対応したUSBインターフェースです。
信号線はi.MX 8M PlusのUSBコントローラ(USB1)に接続されています。 USBデバイスに供給される電源(USB1_VBUS)は、i.MX 8M PlusのGPIO1_IO09ピンで制御しており、
Highレベル出力で電源が供給され、Lowレベル出力で電源が切断されます。
データ転送モード
-
Super Speed(5Gbps)
-
High Speed(480Mbps)
-
Full Speed(12Mbps)
-
Low Speed(1.5Mbps)
表3.18 CON4 信号配列 | ピン番号 | ピン名 | I/O | 説明 |
|---|
1 | USB1_VBUS | Power | 電源出力(USB1_VBUS) | 2 | USB1_D- | In/Out | USB 2.0 データ(-)、i.MX 8M PlusのUSB1_D_Nピンに接続 | 3 | USB1_D+ | In/Out | USB 2.0 データ(+)、i.MX 8M PlusのUSB1_D_Pピンに接続 | 4 | GND | Power | 電源(GND) | 5 | USB1_SSRX- | In | USB 3.0 受信データ(-)、i.MX 8M PlusのUSB1_RX_Nピンに接続 | 6 | USB1_SSRX+ | In | USB 3.0 受信データ(+)、i.MX 8M PlusのUSB1_RX_Pピンに接続 | 7 | GND | Power | 電源(GND) | 8 | USB1_SSTX- | Out | USB 3.0 送信データ(-)、i.MX 8M PlusのUSB1_TX_Nピンに接続 | 9 | USB1_SSTX+ | Out | USB 3.0 送信データ(+)、i.MX 8M PlusのUSB1_TX_Pピンに接続 |
-
デバイスファイル
-
メモリデバイスの場合は、デバイスを認識した順番で/dev/sdN (Nは’a'からの連番)となります。
-
I/Oデバイスの場合は、ファンクションに応じたデバイスファイルとなります。
コンテナ内で動作するアプリケーションから USB 接続のデバイスを扱うための方法について示します。
USB シリアルデバイスを扱う
USB シリアルデバイスをコンテナ内から扱う場合には、Podman のイメージからコンテナを作成する際に
ホスト OS 側の /dev/ttyUSBN を渡す必要があります。
以下は、 /dev/ttyUSB0 を渡して alpine イメージからコンテナを作成する例です。
コンテナ内に入り、setserial コマンドを使って現在の設定を確認することができます。
USB カメラを扱う
USB カメラをコンテナ内から扱う場合には、Podman のイメージからコンテナを作成する際に
ホスト OS 側の /dev/videoN を渡す必要があります。
以下は、 /dev/video3 を渡して alpine イメージからコンテナを作成する例です。
GStreamer などのマルチメディアフレームワークと組み合わせることで、USB カメラからの映像のキャプチャが可能となります。
USB メモリを扱う
ここでは、USB メモリを扱う方法について 2 つの例を示します。
ホスト OS 側でマウントした USB メモリをコンテナから扱う
あらかじめホスト OS 側でマウントしてある USB メモリをコンテナから扱う場合には、Podman のイメージから
コンテナを作成する際にホスト OS 側で USB メモリをマウントしてるディレクトリを渡す必要があります。
上記の例では、USB メモリを /mnt にマウントしました。以下は、 /mnt を渡して alpine イメージからコンテナを作成する例です。
ホスト OS 側の /mnt ディレクトリをコンテナ内の /mnt にマウントしています。
これにより、コンテナ内からも /mnt ディレクトリを通して USB メモリを扱うことができます。
USB メモリをコンテナ内からマウントする
USB メモリをコンテナ内からマウントして扱う場合には、Podman のイメージからコンテナを作成する際に
ホスト OS 側の /dev ディレクトリを渡すと同時に、適切な権限も渡す必要があります。
以下は、 /dev を渡して alpine イメージからコンテナを作成する例です。権限として SYS_ADMIN を渡しています。
コンテナ内に入り、mount コマンドで USB メモリを /mnt にマウントし、保存されているデータを確認することができます。
CON7はJTAGデバッガを接続することのできるJTAGインターフェースです。 JTAGの詳細につきましては、NXP Semiconductorsのホームページからダウンロード可能な
『i.MX 8M Plus Applications Processor Reference Manual』をご参照ください。 表3.19 CON7 信号配列 | ピン番号 | ピン名 | I/O | 説明 | 電圧グループ |
|---|
1 | VDD_1V8 | Power | 電源出力(VDD_1V8) | - | 2 | PMIC_RST_B | In | PMICリセット信号[]、PMICのPMIC_RST_Bピンに接続、PMIC内部でプルアップ(NVCC_SNVS_1V8) | NVCC_SNVS_1V8 | 3 | JTAG_TDI | In | テストデータ入力、i.MX 8M PlusのJTAG_TDIピンに接続、i.MX 8M Plus内部でプルアップ(VDD_1V8) | VDD_1V8 | 4 | JTAG_TMS | In | テストモード選択、i.MX 8M PlusのJTAG_TMSピンに接続、i.MX 8M Plus内部でプルアップ(VDD_1V8) | VDD_1V8 | 5 | JTAG_TCK | In | テストクロック、i.MX 8M PlusのJTAG_TCKピンに接続、i.MX 8M Plus内部でプルアップ(VDD_1V8V) | VDD_1V8 | 6 | JTAG_TDO | Out | テストデータ出力、i.MX 8M PlusのJTAG_TDOピンに接続 | VDD_1V8 | 7 | GND | Power | 電源(GND) | - | 8 | JTAG_MOD | In | モード設定、i.MX 8M PlusのJTAG_MODピンに接続、基板上で10kΩプルダウン | VDD_1V8 |
Armadillo-IoT ゲートウェイ G4 のM.2インターフェース(CON5)に、AzureWave Technologies 製 AW-XM458 を接続可能です。AW-XM458 のWLAN機能は、 PCI Express に接続されます。
「PCI Express デバイスを使用する」も合わせて参照してください。 -
機能
-
IEEE 802.11a/b/g/n/ac/ax 準拠
-
最大通信速度(2.4GHz): 458 Mbps(理論値)
-
最大通信速度(5GHz): 1.2 Gbps(理論値)
-
動作モード: インフラストラクチャモード(STA/AP), アドホックモード
-
チャンネル(2.4GHz): 1-13
-
チャンネル(5GHz): 36-48(W52), 52-64(W53), 100-144(W56)
-
インターフェース仕様
CON5はWLAN+BTコンボモジュール用のM.2インターフェースです。極性キーはEタイプです。 M.2インターフェースに供給される電源(M2_3V3)は、
i.MX 8M PlusのSAI1_RXCピン(GPIO4_IO01)で制御しており、
Highレベル出力で電源が供給され、Lowレベル出力で電源が切断されます。 CON5の信号配列につきましては、公開していません。 LTE+WLANモデル、WLANモデルの場合は、WLAN+BTコンボモジュールが接続されます。
WLAN+BTコンボモジュールには、アンテナケーブル接続用のレセプタクルが搭載されています。
MHF4のプラグを接続可能で、各レセプタクルの用途は以下のとおりです。
表3.20 WLAN+BTコンボモジュール アンテナケーブル用レセプタクルの用途 | インターフェース名 | 用途 |
|---|
CH1 | 無線LAN用(Main) | CH2 | 無線LAN用(Aux) | CH3 | BT用 |
| |
|---|
AW-XM458 のファームウェアは、Armadillo-IoT ゲートウェイ G4にインストールされているlinux-firmware-nxpwifi-9098パッケージに含まれています。 linux-firmware-nxpwifi-9098の著作権およびライセンス情報については、Armadillo-IoT ゲートウェイ G4上で/usr/share/licenses/linux-firmware-nxpwifi-9098/LICENSEを参照してください。 |
Armadillo-IoT ゲートウェイ G4 のM.2インターフェース(CON5)に、AzureWave Technologies 製 AW-XM458 を接続可能です。AW-XM458 のBT機能は、「UART を使用する」に示すUART1に接続されます。 AW-XM458 は、Bluetooth® version 5.3 に対応しており、BLE(Bluetooth Low Energy)、 EDR(Enhanced Data Rate)が利用できます。 | |
|---|
Bluetooth® version 5.0以降で追加されたCoded PHY(Long Range)などの機能は工場出荷状態のソフトウェアで利用することができません。これは、BlueZが非対応の為です。 |
| |
|---|
BT機能を利用するには、Devicetree Overlayの設定が必要です。 [armadillo~]# vi /boot/overlays.txt
fdt_overlays=armadillo_iotg_g4-aw-xm458.dtbo
[armadillo~]# persist_file /boot/overlays.txt
[armadillo~]# reboot |
コンテナ内から Bluetooth を扱うには、コンテナ作成時にホストネットワークを使用するために、
NET_ADMIN の権限を渡す必要があります。
図3.65「Bluetooth を扱うコンテナの作成例」に、alpine イメージから Bluetooth を扱うコンテナを作成する例を示します。 コンテナ内で必要なソフトウェアをインストールして、Bluetooth を起動します。 これにより、bluetoothctl で Bluetooth 機器のスキャンやペアリングなどが行えるようになります。
以下に、bluetoothctl コマンドで周辺機器をスキャンしてペアリングを行う例を示します。 |
コントローラを起動します。
| |
周辺機器をスキャンします。
| |
ペアリングしたい機器の MAC アドレスを指定してペアリングします。
| |
exit で bluetoothctl のプロンプトを終了します。
|
3.6.7. PCI Express デバイスを使用するArmadillo-IoT ゲートウェイ G4のPCI Expressは、i.MX 8M PlusのPCIe(PCI Express)およびPCIe_PHY(PCI Express PHY)を利用しています。 -
機能
-
PCI Express Base Specification, Revision 4.0, Version 0.7 準拠
-
PCI Local Bus Specification, Revision 3.0 準拠
-
PCI Bus Power Management Specification, Revision 1.2 3.0 準拠
-
PCI Express Card Electromechanical Specification, Revision 1.1 準拠
-
リンク幅: x1
-
転送レート: 8.0GT/s
-
割り込み通知方式: MSI
Armadillo-IoT ゲートウェイ G4のUARTは、i.MX 8M PlusのUART(Universal Asynchronous Receiver/Transmitter)を利用しています。 Armadillo-IoT ゲートウェイ G4では、USBシリアル変換IC(CP2102N/Silicon Labs)経由でUART2に接続されています。 -
フォーマット
-
データビット長: 7 or 8ビット
-
ストップビット長: 1 or 2ビット
-
パリティ: 偶数 or 奇数 or なし
-
フロー制御: CTS/RTS or XON/XOFF or なし
-
最大ボーレート:4Mbps
| |
|---|
USBコンソールインターフェース(CON6)は4Mbpsで利用することができません。USBシリアル変換IC(CP2102N/Silicon Labs)の最大ボーレートが3Mbpsである為です。 |
拡張インターフェース(CON11)でシリアル(UART)を最大2ポート拡張することが可能です。
信号線はi.MX 8M PlusのUART(UART3、UART4)に接続されています。
信号レベル: VDD_1V8
-
インターフェース仕様
CON6はUSBコンソール用インターフェースです。 信号線はUSBシリアル変換IC(CP2102N/Silicon Labs)経由でi.MX 8M PlusのUARTコントローラ(UART2)に
接続されています。 表3.21 CON6 信号配列 | ピン番号 | ピン名 | I/O | 説明 |
|---|
1 | VBUS_CNSL | Power | 電源入力(VBUS_CNSL) | 2 | CNSL_USB_D- | In/Out | コンソール用USBのマイナス側信号、USBシリアル変換ICに接続 | 3 | CNSL_USB_D+ | In/Out | コンソール用USBのプラス側信号、USBシリアル変換ICに接続 | 4 | CNSL_USB_ID | - | 未接続 | 5 | GND | Power | 電源(GND) |
コンテナ内で動作するアプリケーションから RS-232C や RS-485 などのシリアル通信を行うためには、
Podman のイメージからコンテナを作成する際にホスト OS 側のデバイスファイル /dev/ttymxcN を渡す必要があります。
以下は、/dev/ttymxc0 を渡して alpine イメージからコンテナを作成する例です。 コンテナ内に入り、setserial コマンドを使って現在の設定を確認することができます。 Armadillo-IoT ゲートウェイ G4のHDMIは、i.MX 8M PlusのHDMI TX Controller、HDMI TX PHY、HDMI TX BLK_CTRL、HTX_PVI(HDMI TX Parallel Video Interface)およびLCDIF(LCD Interface)を利用しています。LCDIFは、LCDIF3を利用します。 Armadillo-IoT ゲートウェイ G4は、HDMI対応ディスプレイへの画像出力及び、音声出力をサポートしています。 Linuxでは、それぞれDRM(Direct Rendering Manager)デバイス []、ALSA(Advanced Linux Sound Architecture)デバイスとして利用することができます。 -
機能(画像出力)
-
最大解像度: 4096x2160ピクセル
-
最大ドットクロック: 297MHz
-
カラーフォーマット: RGB888(24bit)
-
走査方式: プログレッシブ
| |
|---|
上記を満していても、画像出力できない場合があります。次のVIC [] は非対応である為、画像出力できません。 -
DAR(Display Aspect Ratio)が64
: 27または256 : 135のVIC
|
-
機能(音声出力)
-
サンプリング周波数: 32kHz, 44.1kHz, 48kHz, 88.2kHz, 96kHz, 176.4kHz, 192kHz
-
チャンネル数: 2
-
フォーマット: Signed 24/32 bit, Little-endian
-
インターフェース仕様
CON8はHDMI出力インターフェースです。 信号線はi.MX 8M PlusのHDMI TXコントローラに接続されています。 表3.22 CON8 信号配列 | ピン番号 | ピン名 | I/O | 説明 |
|---|
1 | HDMI_HPD | In | ホットプラグ検出、HEAC(-)、i.MX 8M PlusのEARC_N_HPDピン、HDMI_HPDピンに接続 | 2 | HDMI_Utility | In/Out | Utility、HEAC(+)、i.MX 8M PlusのEARC_P_UTILピンに接続 | 3 | HDMI_TX2+ | Out | TMDSデータ2(+)、i.MX 8M PlusのHDMI_TX2_Pピンに接続 | 4 | HDMI_TX2_Shield | - | TMDSデータ2シールド | 5 | HDMI_TX2- | Out | TMDSデータ2(-)、i.MX 8M PlusのHDMI_TX2_Nピンに接続 | 6 | HDMI_TX1+ | Out | TMDSデータ1(+)、i.MX 8M PlusのHDMI_TX1_Pピンに接続 | 7 | HDMI_TX1_Shield | - | TMDSデータ1シールド | 8 | HDMI_TX1- | Out | TMDSデータ1(-)、i.MX 8M PlusのHDMI_TX1_Nピンに接続 | 9 | HDMI_TX0+ | Out | TMDSデータ0(+)、i.MX 8M PlusのHDMI_TX0_Pピンに接続 | 10 | HDMI_TX0_Shield | - | TMDSデータ0シールド | 11 | HDMI_TX0- | Out | TMDSデータ0(-)、i.MX 8M PlusのHDMI_TX0_Nピンに接続 | 12 | HDMI_TXC+ | Out | TMDSクロック(+)、i.MX 8M PlusのHDMI_TXC_Pピンに接続 | 13 | HDMI_TXC_Shield | - | TMDSクロックシールド | 14 | HDMI_TXC- | Out | TMDSクロック(-)、i.MX 8M PlusのHDMI_TXC_Nピンに接続 | 15 | HDMI_CEC | In/Out | CEC信号、i.MX 8M PlusのHDMI_CECピンに接続 | 16 | HDMI_GND | Power | 電源(GND) | 17 | HDMI_SCL | In/Out | DDCクロック、i.MX 8M PlusのHDMI_DDC_SCLピンに接続 | 18 | HDMI_SDA | In/Out | DDCデータ、i.MX 8M PlusのHDMI_DDC_SDAピンに接続 | 19 | 5V_HDMI | Power | 電源出力(5V_HDMI) |
-
デバイスファイル
-
/dev/dri/card1 (DRM)
-
/dev/fb0 (フレームバッファ)
-
hw:0 (ALSA)
-
sysfs DRMクラスディレクトリ
-
/sys/class/drm/card1-HDMI-A-1
| |
|---|
以下のコマンドを実行することで映像出力の信号を停止することができます。 [armadillo ~]# echo 1 > /sys/class/graphics/fb0/blank 映像出力を行いたい場合は以下のコマンドを実行します。 [armadillo ~]# echo 0 > /sys/class/graphics/fb0/blank |
使用方法については「画面表示を行う」を参照してください。 特別な理由が無い限りは Wayland で画面表示を行うことを推奨しています。 Armadillo-IoT ゲートウェイ G4 に接続したスピーカーなどの音声出力デバイスへコンテナ内から音声を出力するためには、
Podman のイメージからコンテナを作成する際にホスト OS 側のデバイスファイル /dev/snd を渡す必要があります。
以下は、/dev/snd を渡して debian イメージからコンテナを作成する例です。 コンテナ内に入り、alsa-utils などのソフトウェアで音声出力を行えます。 |
alsa-utils をインストールします。
| |
alsa-utils を起動します。
| |
指定したファイル名の音声ファイルを再生します。
|
aplay の引数にある、M は音声を出力したい CARD 番号、N はデバイス番号を表しています。
CARD 番号とデバイス番号は、aplay コマンドに -l オプションを与えることで確認できます。 Armadillo-IoT ゲートウェイ G4のLVDSは、i.MX 8M PlusのLDB(LVDS Display Bridge)およびLCDIF(LCD Interface)を利用しています。LCDIFは、LCDIF2を利用します。 Armadillo-IoT ゲートウェイ G4では、LVDSインターフェース(CON9)がLVDS0を利用しています。 Linuxでは、画像出力をDRM(Direct Rendering Manager)デバイス []として利用することができます。 -
機能
-
最大解像度: 1366x768p60
-
最大ピクセルクロック: 80MHz
-
レーン数: 4(データ), 1(クロック)
-
カラーフォーマット: RGB666(18bit), RGB888(24bit)
-
カラーマッピング: JEIDA, VESA
-
インターフェース仕様
CON9は1チャンネル(4レーン)のLVDS出力インターフェースです。 信号線はi.MX 8M PlusのLVDS Display Bridge(LDB)に接続されています。 | |
|---|
CON11の5、7ピンとCON9の7、8ピンは同じI2Cバス(I2C4)に接続されています。 |
表3.23 CON9 搭載コネクタと対向コネクタ例 | 名称 | 型番 | メーカー | 備考 |
|---|
搭載コネクタ | FX15S-31S-0.5SH | HIROSE ELECTRIC | 許容電流 0.5A(端子1本あたり) | 対向コネクタ | FX15S-31P-C | HIROSE ELECTRIC | シェル付きシールド強化タイプ(AWG30~AWG32対応) | FX15SW-31P-C | HIROSE ELECTRIC | シェル付きシールド強化タイプ(AWG28~AWG30対応) | コンタクト | FX15-3032PCFB | HIROSE ELECTRIC | 適用電線AWG30~AWG32 | FX15-2830PCFB | HIROSE ELECTRIC | 適用電線AWG28~AWG30 |
| |
|---|
接触不良や断線を防ぐため、コンタクトは汎用工具ではなく専用工具で圧着することをお勧めします。
コンタクトとコネクタの選定前に、工具をご確認ください。 |
表3.24 CON9 信号配列 | ピン番号 | ピン名 | I/O | 説明 | 電圧グループ |
|---|
1 | GND | Power | 電源(GND) | - | 2 | VIN | Power | 電源出力(VIN) | - | 3 | VIN | Power | 電源出力(VIN) | - | 4 | VIN | Power | 電源出力(VIN) | - | 5 | VIN | Power | 電源出力(VIN) | - | 6 | GND | Power | 電源(GND) | - | 7 | I2C4_SCL | In/Out | I2Cクロック、i.MX 8M PlusのI2C4_SCLピン、CON11 5ピンに接続、
基板上で4.7kプルアップ(VDD_1V8) | VDD_1V8 | 8 | I2C4_SDA | In/Out | I2Cデータ、i.MX 8M PlusのI2C4_SDAピン、CON11 7ピンに接続、
基板上で4.7kプルアップ(VDD_1V8) | VDD_1V8 | 9 | GND | Power | 電源(GND) | - | 10 | LVDS0_TX0N | Out | LVDSデータ0(-)、i.MX 8M PlusのLVDS0_D0_Nピンに接続 | - | 11 | LVDS0_TX0P | Out | LVDSデータ0(+)、i.MX 8M PlusのLVDS0_D0_Pピンに接続 | - | 12 | GND | Power | 電源(GND) | - | 13 | LVDS0_TX1N | Out | LVDSデータ1(-)、i.MX 8M PlusのLVDS0_D1_Nピンに接続 | - | 14 | LVDS0_TX1P | Out | LVDSデータ1(+)、i.MX 8M PlusのLVDS0_D1_Pピンに接続 | - | 15 | GND | Power | 電源(GND) | - | 16 | LVDS0_CLKN | Out | LVDSクロック(-)、i.MX 8M PlusのLVDS0_CLK_Nピンに接続 | - | 17 | LVDS0_CLKP | Out | LVDSクロック(+)、i.MX 8M PlusのLVDS0_CLK_Pピンに接続 | - | 18 | GND | Power | 電源(GND) | - | 19 | LVDS0_TX2N | Out | LVDSデータ2(-)、i.MX 8M PlusのLVDS0_D2_Nピンに接続 | - | 20 | LVDS0_TX2P | Out | LVDSデータ2(+)、i.MX 8M PlusのLVDS0_D2_Pピンに接続 | - | 21 | GND | Power | 電源(GND) | - | 22 | LVDS0_TX3N | Out | LVDSデータ3(-)、i.MX 8M PlusのLVDS0_D3_Nピンに接続 | - | 23 | LVDS0_TX3P | Out | LVDSデータ3(+)、i.MX 8M PlusのLVDS0_D3_Pピンに接続 | - | 24 | GND | Power | 電源(GND) | - | 25 | GPIO3_IO00 | In/Out | 拡張入出力、i.MX 8M PlusのNAND_ALEピンに接続 | VDD_1V8 | 26 | GPIO3_IO01 | In/Out | 拡張入出力、i.MX 8M PlusのNAND_CE0_Bピンに接続 | VDD_1V8 | 27 | GPIO5_IO03 | In/Out | 拡張入出力、i.MX 8M PlusのSPDIF_TXピンに接続 | VDD_1V8 | 28 | GPIO5_IO04 | In/Out | 拡張入出力、i.MX 8M PlusのSPDIF_RXピンに接続 | VDD_1V8 | 29 | GND | Power | 電源(GND) | - | 30 | VDD_1V8 | Power | 電源出力(VDD_1V8) | - | 31 | GND | Power | 電源(GND) | - |
-
デバイスファイル
-
/dev/dri/card1 (DRM)
-
/dev/fb0 (フレームバッファ)
-
sysfs DRMクラスディレクトリ
-
/sys/class/drm/card1-LVDS-1
使用方法については「画面表示を行う」を参照してください。 特別な理由が無い限りは Wayland で画面表示を行うことを推奨しています。 3.6.12. MIPI CSI-2 カメラを使用するArmadillo-IoT ゲートウェイ G4のMIPI CSI-2は、i.MX 8M PlusのMIPI_CSI(MIPI CSI Host Controller)を利用しています。 Armadillo-IoT ゲートウェイ G4では、MIPI-CSI インターフェース(CON10)がMIPI_CSI1を利用しています。 Linuxでは、カメラ [] からの画像入力をV4L2(Video4Linux2)デバイスとして利用することができます。 -
機能
-
MIPI D-PHY specification V1.2準拠
-
MIPI CSI2 Specification V1.3準拠(C-PHY featureを除く)
-
レーン数: 2(データ), 1(クロック)
-
最大ピクセルクロック: 400MHz
-
データレート: 80Mbps - 1.5Gbps(1レーンあたり)
-
カラーフォーマット(YUV): YUV420 8/10bit, YUV420 8bit Legacy, YUV420 8/10bit CSPS, YUV422 8/10bit
-
カラーフォーマット(RGB): RGB565, RGB666, RGB888
-
カラーフォーマット(RAW): RAW6, RAW7, RAW8, RAW10, RAW12, RAW14
-
インターフェース仕様
CON10はカメラ接続用の1チャンネル(2レーン)のMIPI-CSIインターフェースです。 信号線はi.MX 8M PlusのMIPI Camera Serial Interface(MIPI CSI1)に接続されています。 表3.25 CON10 搭載コネクタとフレキシブルフラットケーブル例 | 名称 | 型番 | メーカー | 備考 |
|---|
搭載コネクタ | 1-1734248-5 | TE Connectivity | 許容電流 1A(端子1本あたり) |
表3.26 CON10 信号配列 | ピン番号 | ピン名 | I/O | 説明 | 電圧グループ |
|---|
1 | GND | Power | 電源(GND) | - | 2 | CSI1_DN_0 | In | MIPIデータ0(-)、i.MX 8M PlusのMIPI_CSI1_D0_Nピンに接続、
17ピンと共通 | - | 3 | CSI1_DP_0 | In | MIPIデータ0(+)、i.MX 8M PlusのMIPI_CSI1_D0_Pピンに接続、
18ピンと共通 | - | 4 | GND | Power | 電源(GND) | - | 5 | CSI1_DN_1 | In | MIPIデータ1(-)、i.MX 8M PlusのMIPI_CSI1_D1_Nピンに接続、
20ピンと共通 | - | 6 | CSI1_DP_1 | In | MIPIデータ1(+)、i.MX 8M PlusのMIPI_CSI1_D1_Pピンに接続、
21ピンと共通 | - | 7 | GND | Power | 電源(GND) | - | 8 | CSI1_CK_N | In | MIPIクロック(-)、i.MX 8M PlusのMIPI_CSI1_CLK_Nピンに接続、
23ピンと共通 | - | 9 | CSI1_CK_P | In | MIPIクロック(+)、i.MX 8M PlusのMIPI_CSI1_CLK_Pピンに接続、
24ピンと共通 | - | 10 | GND | Power | 電源(GND) | - | 11 | CSI1_GPIO0_3V3 | In/Out | 拡張入出力、レベル変換ICを経由してi.MX 8M PlusのNAND_DATA00ピンに接続、
26ピンと共通 | VEXT_3V3 | 12 | CSI1_GPIO1_3V3 | In/Out | 拡張入出力、レベル変換ICを経由してi.MX 8M PlusのNAND_DATA01ピンに接続、
27ピンと共通 | VEXT_3V3 | 13 | I2C2_SCL_3V3 | Out | I2Cクロック、レベル変換ICを経由してi.MX 8M PlusのI2C2_SCLピンに接続、基板上で4.7kプルアップ(VEXT_3V3)、
28ピンと共通 | VEXT_3V3 | 14 | I2C2_SDA_3V3 | In/Out | I2Cデータ、レベル変換ICを経由してi.MX 8M PlusのI2C2_SDAピンに接続、基板上で4.7kプルアップ(VEXT_3V3)、
29ピンと共通 | VEXT_3V3 | 15 | VEXT_3V3 | Power | 電源出力(VEXT_3V3) | - | 16 | GND | Power | 電源(GND) | - | 17 | CSI1_DN_0 | In | MIPIデータ0(-)、i.MX 8M PlusのMIPI_CSI1_D0_Nピンに接続、
2ピンと共通 | - | 18 | CSI1_DP_0 | In | MIPIデータ0(+)、i.MX 8M PlusのMIPI_CSI1_D0_Pピンに接続、
3ピンと共通 | - | 19 | GND | Power | 電源(GND) | - | 20 | CSI1_DN_1 | In | MIPIデータ1(-)、i.MX 8M PlusのMIPI_CSI1_D1_Nピンに接続、
5ピンと共通 | - | 21 | CSI1_DP_1 | In | MIPIデータ1(+)、i.MX 8M PlusのMIPI_CSI1_D1_Pピンに接続、
6ピンと共通 | - | 22 | GND | Power | 電源(GND) | - | 23 | CSI1_CK_N | In | MIPIクロック(-)、i.MX 8M PlusのMIPI_CSI1_CLK_Nピンに接続、
8ピンと共通 | - | 24 | CSI1_CK_P | In | MIPIクロック(+)、i.MX 8M PlusのMIPI_CSI1_CLK_Pピンに接続、
9ピンと共通 | - | 25 | GND | Power | 電源(GND) | - | 26 | CSI1_GPIO0_3V3 | In/Out | 拡張入出力、レベル変換ICを経由してi.MX 8M PlusのNAND_DATA00ピンに接続、基板上で4.7kプルアップ(VEXT_3V3)、
11ピンと共通 | VEXT_3V3 | 27 | CSI1_GPIO1_3V3 | In/Out | 拡張入出力、レベル変換ICを経由してi.MX 8M PlusのNAND_DATA01ピンに接続、基板上で4.7kプルアップ(VEXT_3V3)、
12ピンと共通 | VEXT_3V3 | 28 | I2C2_SCL_3V3 | Out | I2Cクロック、レベル変換ICを経由してi.MX 8M PlusのI2C2_SCLピンに接続、基板上で4.7kプルアップ(VEXT_3V3)、
13ピンと共通 | VEXT_3V3 | 29 | I2C2_SDA_3V3 | In/Out | I2Cデータ、レベル変換ICを経由してi.MX 8M PlusのI2C2_SDAピンに接続、基板上で4.7kプルアップ(VEXT_3V3)、
14ピンと共通 | VEXT_3V3 | 30 | VEXT_3V3 | Power | 電源(VEXT_3V3) | - |
MIPI CSI-2 カメラを使用する場合、 Device Tree の変更が必要です。 Armadillo-IoT ゲートウェイ G4 では標準で以下の MIPI CSI-2 カメラの DT overlay を提供しています。 DT overlay の使用方法については「DT overlay によるカスタマイズ」を参照してください。 表3.27 MIPI CSI-2 カメラ用の DT overlay | DT overlay ファイル | 説明 |
|---|
armadillo_iotg_g4-con10-arducam.dtbo | arducam カメラを MIPI CSI-2 で接続する場合にご使用ください。 | armadillo_iotg_g4-con10-imx219.dtbo | Raspberry Pi 向けの imx219 カメラを MIPI CSI-2 で接続する場合にご使用ください。 | armadillo_iotg_g4-con10-ox01f10.dtbo | OMNIVISION の OX01F10 カメラを MIPI CSI-2 で接続する場合にご使用ください。 |
GPIOは、i.MX 8M PlusのGPIO(General Purpose Input/Output)および、ON Semiconductor製FXL6408(GPIOエキスパンダー)を利用しています。 拡張インターフェース(CON11、CON12)で GPIO を最大 34 ボート拡張することが可能です。
拡張インターフェースの仕様については「CON11、 CON12(拡張インターフェース)」を参照してください。 -
デバイスファイル
-
sysfs GPIOクラスディレクトリ
| |
|---|
sysfs GPIOクラスは旧バージョンのLinuxカーネルとの互換性維持の為に残っています。新しくアプリケーションを開発する際の利用はおすすめしません。 新しくアプリケーションを開発する場合は、libgpiodパッケージに含まれるアプリケーションまたはLinux カーネルのソースコードに含まれているサンプル(tools/gpio/)を参考にしてください。 |
コンテナ内で動作するアプリケーションから GPIO を扱うためには、Podman のイメージからコンテナを作成する際にホスト OS 側の
デバイスファイル /dev/gpiochipN を渡す必要があります。以下は、/dev/gpiochip2 を渡して alpine イメージからコンテナを作成する例です。
/dev/gpiochipN を渡すと、GPION+1 を操作することができます。 コンテナ内に入ってコマンドで GPIO を操作する例を以下に示します。この例では GPIO3_IO21 を操作しています。 |
GPIO 番号 21 の値を取得します。
| |
取得した値を表示します。
| |
GPIO 番号 21 に 1(High) を設定します。
|
他にも、gpiodetect コマンドで認識している gpiochip をリスト表示できます。
以下の例では、コンテナを作成する際に渡した /dev/gpiochip2 が認識されていることが確認できます。 gpioinfo コマンドでは、指定した gpiochip の詳細な情報を表示することができます。 C 言語プログラムから操作する場合は、GPIO 操作ライブラリである libgpiod を使用することができます。 I2C インターフェースは、i.MX 8M PlusのI2C(I2C Controller)を利用しています。また、i2c-gpioを利用することで、I2C バスを追加することができます。 主に拡張インターフェース(CON11、CON12)で I2C を最大3ポート拡張することが可能です。
拡張インターフェースの仕様については「CON11、 CON12(拡張インターフェース)」を参照してください。
信号線はi.MX 8M PlusのI2Cコントローラ(I2C4、I2C5、I2C6)に接続されています。 -
最大データ転送レート: 384kbps
-
信号レベル: VDD_1V8
Armadillo-IoT ゲートウェイ G4で利用しているI2Cバスと、接続されるI2Cデバイスを次に示します。 表3.28 I2C デバイス I2C バス | I2C デバイス | アドレス | デバイス名 | 0(I2C1) | 0x25 | PCA9450(PMIC) | 1(I2C2) | 0x2c | USB2422(USBハブ) | 0x32 | RV-8803-C7(RTC) | 2(I2C3) | 0x43 | FXL6408(GPIOエキスパンダー) | 0x48 | SE050(セキュアエレメント) | 3(I2C4) | 接続デバイス無し |
Armadillo-IoT ゲートウェイ G4の標準状態では、CONFIG_I2C_CHARDEVが有効となっているためユーザードライバでI2Cデバイスを制御することができます。ユーザードライバを利用する場合は、Linux カーネルでI2Cデバイスに対応するデバイスドライバを無効にする必要があります。 -
機能
-
デバイスファイル
-
/dev/i2c-0 (I2C1)
-
/dev/i2c-1 (I2C2)
-
/dev/i2c-2 (I2C3)
-
/dev/i2c-3 (I2C4)
| |
|---|
/dev/i2c-6 は、HDMI DDCです。
|
コンテナ内で動作するアプリケーションから I2C を扱うためには、Podman のイメージからコンテナを作成する際にホスト OS 側の
デバイスファイル /dev/i2c-N を渡す必要があります。以下は、/dev/i2c-1 を渡して alpine イメージからコンテナを作成する例です。 コンテナ内に入り、i2c-tools に含まれる i2cdetect コマンドを使ってスレーブアドレスを確認することができます。 拡張インターフェース(CON11)で SPI を最大 2 ボート拡張することが可能です。
拡張インターフェースの仕様については「CON11、 CON12(拡張インターフェース)」を参照してください。 -
最大クロック周波数: 66MHz(リード)/23MHz(ライト)
-
信号レベル : VDD_1V8
コンテナ内で動作するアプリケーションから SPI を扱うためには、Podman のイメージからコンテナを作成する際にホスト OS 側の
デバイスファイル /dev/spidevN.N を渡す必要があります。以下は、/dev/spidev1.0 を渡して alpine イメージからコンテナを作成する例です。 コンテナ内に入り、spi-tools に含まれる spi-config コマンドを使って現在の設定を確認することができます。 拡張インターフェース(CON11)で CAN を最大2ポート拡張することが可能です。
拡張インターフェースの仕様については「CON11、 CON12(拡張インターフェース)」を参照してください。
信号線はi.MX 8M PlusのFLEXCAN(FLEXCAN1、FLEXCAN2)に接続されています。 -
CAN FD、CAN 2.0Bプロトコル対応
-
信号レベル: VDD_1V8
コンテナ内で動作するアプリケーションから CAN 通信を行うためには、
Podman のイメージからコンテナを作成する際に、コンテナを実行するネットワークとして host を、
権限として NET_ADMIN を指定する必要があります。
以下は、ネットワークとして host を、権限として NET_ADMIN を指定して alpine イメージからコンテナを作成する例です。 コンテナ内に入り、ip コマンドで CAN を有効にすることができます。
以下に、設定例を示します。 |
CAN の設定のために必要な iproute2 をインストールします。すでにインストール済みの場合は不要です。
| |
CAN の通信速度を 125000 kbps に設定します。
| |
can0 インターフェースを起動します。
| |
can0 インターフェースの現在の使用状況を表示します。
|
コンテナ内で動作するアプリケーションから PWM を扱うためには、
Podman のイメージからコンテナを作成する際にホスト OS 側の /sys ディレクトリを渡す必要があります。デフォルト状態でもマウントされてますが、読み取り専用になって使えませんのでご注意ください。
以下は、 /sys を渡して alpine イメージからコンテナを作成する例です。ここで渡された /sys ディレクトリは
コンテナ内の同じ /sys にマウントされます。 コンテナ内に入り、/sys/class/pwm/pwmchipN ディレクトリ内の export ファイルに 0 を書き込むことで扱えるようになります。
以下に、/sys/class/pwm/pwmchip2 を扱う場合の動作設定例を示します。 |
pwmchip2 を export します。
| |
周期を 1 秒にします。単位はナノ秒です。
| |
PWM の ON 時間 を 0.5 秒にします。
| |
PWM 出力を有効にします。
|
I2Sを最大1ポート拡張することが可能です。
信号線はi.MX 8M Plusの同期式オーディオインターフェース(SAI3)に接続されています。 Armadillo サイトの Howto にて I2S を使用する例を公開していますので、そちらを参照してください。 LとRが対になったPDM MICを最大4ポート拡張することが可能です。
信号線はi.MX 8M PlusのPDMマイクロフォンインターフェース(MICFIL)に接続されています。 Armadillo サイトの Howto にて PDM マイクを使用する例を公開していますので、そちらを参照してください。 Armadillo-IoT ゲートウェイ G4のリアルタイムクロックは、Armadillo-IoT ゲートウェイ G4に搭載されたMicro Crystal製RV-8803-C7および、i.MX 8M PlusのSNVS_HP Real Time Counterを利用しています。 -
機能
-
インターフェース仕様
CON13はリアルタイムクロックのバックアップ用インターフェースです。
長時間電源が切断されても時刻データを保持させたい場合にご使用ください。 CON13にはCR2032、BR2032等の電池を接続することができます。
リアルタイムクロックの時刻保持時の平均消費電流は、
データシート上、240nA(Typ.)となっておりますので、
電池寿命までの時刻保持が期待できます。 温度補償タイプのリアルタイムクロックを実装しており、
平均月差は周囲温度-20℃~70℃で8秒(参考値)です。 表3.29 CON13 信号配列 | ピン番号 | ピン名 | I/O | 説明 |
|---|
1 | RTC_BAT | Power | リアルタイムクロックのバックアップ用電源入力(RTC_BAT) | 2 | GND | Power | 電源(GND) |
| |
|---|
電池をホルダーへ装着する際は、異物の挟み込みや不完全な装着がないように、目視での異物確認や
装着状態の確認を行ってください。 |
-
デバイスファイル
-
/dev/rtc ( /dev/rtc0 へのシンボリックリンク)
-
/dev/rtc0 (RV-8803-C7)
-
/dev/rtc1 (SNVS_HP Real Time Counter)
| |
|---|
RV-8803-C7が /dev/rtc0 、SNVS_HP Real Time Counterが /dev/rtc1 となるよう、Device Treeでエイリアスを設定しています。 |
| |
|---|
Linux カーネルのバージョン v5.10.86-r0 以降では、NTPサーバーとRTCを時刻同期した場合、rtc0 (RV-8803-C7)にのみ時刻が保存されます。 Linux カーネルのバージョン v5.10.52-r1 では、NTPサーバーとRTCを時刻同期した場合、rtc0 (RV-8803-C7)とrtc1 (SVNS) の両方に時刻が保存されていました。 |
| |
|---|
RV-8803-C7は、毎分 0 秒にしかアラーム割り込みを発生させることができません。
0 時 0 分 30 秒の時に、1 秒後にアラームが鳴るように設定しても、
実際にアラーム割り込みが発生するのは 0 時 1 分 0 秒となります。 |
アラーム割り込みは、デバイスファイル経由で利用することができます。 詳細な情報については、Linux カーネルのソースコードに含まれているドキュメント(Documentation/admin-guide/rtc.rst)やサンプルプログラム(tools/testing/selftests/rtc/rtctest.c)を参照してください。 コンテナ内から RTC を扱うためには、Podman のイメージからコンテナを作成する際にホスト OS 側の
デバイスファイル /dev/rtcN を渡すと同時に、RTC への時刻の設定を行うための権限も渡す必要があります。
以下は、/dev/rtc0 を渡して alpine イメージからコンテナを作成する例です。権限として SYS_TIME も渡しています。 コンテナ内に入り、hwclock コマンドで RTC の時刻表示と設定ができます。 |
RTC に設定されている現在時刻を表示します。
| |
システム時刻を 2021 年 4 月 1 日 9 時 0 分 0 秒に設定します。
| |
システム時刻を RTC に反映させます。
| |
RTC に設定されている時刻が変更されていることを確認します。
|
CON14、CON15は電源入力用のインターフェースです。 -
インターフェース仕様(CON14)
CON14にはDCジャックが実装されており、図3.87「ACアダプタの極性マーク」と同じ極性マークのあるACアダプタが使用できます。対応プラグは内径2.1mm、外形5.5mmのものとなります。
-
インターフェース仕様(CON15)
CON15には2mmピッチのライトアングルコネクタを実装しています。 表3.30 CON15 搭載コネクタと対向コネクタ例 | 名称 | 型番 | メーカー | 備考 |
|---|
搭載コネクタ | S02B-PASK-2(LF)(SN) | J.S.T.Mfg. | 許容電流 3A(端子1本あたり) | 対向コネクタ | PAP-02V-S | J.S.T.Mfg. | - | コンタクト | SPHD-001T-P0.5 | J.S.T.Mfg. | 適用電線AWG26~AWG22 | SPHD-002T-P0.5 | J.S.T.Mfg. | 適用電線AWG28~AWG24 |
表3.31 CON15 信号配列 | ピン番号 | ピン名 | I/O | 説明 |
|---|
1 | VIN | Power | 電源入力(VIN) | 2 | GND | Power | 電源(GND) |
| |
|---|
CON11、CON14、CON15の電源ライン(VIN)は接続されており、同時に電源を供給することはできません。 |
| |
|---|
ACアダプタを使用する際は、ACアダプタのDCプラグをArmadillo-IoT ゲートウェイ G4に接続してからACプラグをコンセントに挿してください。 |
| |
|---|
電源を再投入する際は、コンデンサに蓄えられた電荷を抜くため、電源を切断後、一定時間以上待つ必要があります。
開発セット付属のACアダプタの場合に必要な時間は以下のとおりです。 -
DCプラグ側で電源を切断した場合 : 約5秒
-
ACプラグ側で電源を切断した場合 : 約1分
コンデンサに蓄えられた電荷が抜ける前に電源を再投入した場合、
電源シーケンスが守られず、起動しない等の動作不具合の原因となります。 |
-
機能
JP1は起動デバイス設定ジャンパです。
JP1の状態で、起動デバイスを設定することができます。 表3.32 ジャンパの状態と起動デバイス | JP1の状態 | 起動デバイス |
|---|
オープン | eMMC | ショート | microSD(CON1) |
-
インターフェース仕様
表3.33 JP1 信号配列 | ピン番号 | ピン名 | I/O | 説明 |
|---|
1 | JP1 | In | 起動デバイス設定用信号、i.MX 8M PlusのBOOT_MODE0ピンに接続、基板上で100kΩプルダウン | 2 | JP1_PU | Out | 基板上で4.7kΩプルアップ(VDD_1V8) |
Armadillo-IoT ゲートウェイ G4に搭載されているユーザースイッチには、GPIOが接続されています。 -
インターフェース仕様
SW1は、ユーザー側で自由に利用できる押しボタンスイッチです。 表3.34 SW1 信号配列 | 部品番号 | 名称 | 説明 |
|---|
SW1 | ユーザースイッチ | i.MX 8M PlusのGPIO1_IO13ピンに接続、基板上で10kΩプルアップ(VDD_1V8)
(Low: 押された状態、High: 押されていない状態) |
Linuxでは、ユーザー空間でイベント(Press/Release)を検出することができます。Linuxでは、GPIO接続用キーボードドライバ(gpio-keys)で制御することができます。 ユーザースイッチと信号には、次に示すキーコードが割り当てられています。 表3.35 キーコード | ユーザースイッチ | キーコード | イベントコード | X11 キーコード |
|---|
SW1 | KEY_PROG1
| 148 | XF86Launch1
| EC25-J RI | KEY_PROG2
| 149 | XF86Launch2
| 予約 | KEY_PROG3
| 202 | XF86Launch3
| 予約 | KEY_PROG4
| 203 | XF86Launch4
| PWR_OFF | KEY_POWER
| 116 | XF86PowerOff
| REBOOT | KEY_RESET
| 408 | なし |
-
デバイスファイル
-
/dev/input/by-path/platform-gpio-keys-event []
Armadillo-IoT ゲートウェイ G4 にはユーザースイッチが実装されています。これらのスイッチのプッシュ/リリースイベントを取得するためには、
Podman のイメージからコンテナを作成する際にホスト OS 側の /dev/input ディレクトリを渡す必要があります。
以下は、/dev/input を渡して alpine イメージからコンテナを作成する例です。ここで渡された /dev/input ディレクトリは
コンテナ内の /dev/input にマウントされます。 コンテナ内に入り、evtest コマンドでイベントを確認できます。 |
SW1のボタン プッシュ イベントを検出したときの表示
| |
SW1のボタン リリース イベントを検出したときの表示
|
ユーザースイッチ押下などに対して、細かく動作を指定できる buttond という機能があります。
詳細は「ボタンやキーを扱う」を参照してください。 Armadillo-IoT ゲートウェイ G4に搭載されているユーザーLEDには、GPIOが接続されています。 -
インターフェース仕様(LED3)
LED3は、ユーザー側で自由に利用できるLEDです。 表3.36 LED3の状態 | 部品番号 | 名称(色) | 説明 |
|---|
LED3 | ユーザー LED(緑) | トランジスタを経由してi.MX 8M PlusのGPIO1_IO14ピンに接続
(Low: 消灯、High: 点灯) |
-
インターフェース仕様(LED4)
LED4は、Armadillo-IoT ゲートウェイ G4の電源確認用のLEDです。 表3.37 LED4の状態 | 部品番号 | 名称(色) | 状態 | 説明 |
|---|
LED4 | 電源LED(緑) | 点灯 | VDD_3V3が供給されている | 消灯 | VDD_3V3が供給されていない |
Linuxでは、GPIO接続用LEDドライバ(leds-gpio)で制御することができます。 Armadillo-IoT ゲートウェイ G4 には LED が実装されています。これらの LED を扱うためには、
Podman のイメージからコンテナを作成する際にホスト OS 側の /sys ディレクトリを渡す必要があります。
LEDクラスディレクトリと LED の対応を次に示します。 表3.38 LED クラスディレクトリと LED の対応 | LEDクラスディレクトリ | インターフェース | デフォルトトリガ |
|---|
/sys/class/leds/led1/
| ユーザーLED緑 | none
|
以下は、/sys を渡して alpine イメージからコンテナを作成する例です。ここで渡された /sys ディレクトリは
コンテナ内の /sys にマウントされます。 コンテナ内に入り、brightness ファイルに値を書き込むことで LED の点灯/消灯を行うことができます。
0 を書き込むと消灯、0 以外の値 (1〜255) を書き込むと点灯します。 brightness ファイルを読み出すことで、現在の LED の状態を参照することも可能です。 Linux では、LED をある特定のタイミングで光らせることができます。これを「トリガ」と呼びます。
LEDクラスディレクトリ以下の trigger ファイルへ値を書き込むことによってLEDの点灯/消灯にトリガを設定することができます。
trigger でサポートされている主な値は以下の通りです。 表3.39 LEDトリガの種類 | 設定 | 説明 |
|---|
none
| トリガを設定しません | mmc1
| microSD スロットのアクセスランプにします | mmc2
| eMMC のアクセスランプにします | heartbeat
| 心拍のように点灯/消灯を行います | default-on
| 主に Linux カーネルから使用します。LED が点灯します |
trigger ファイルを読み出すとサポートしているトリガと、現在有効のトリガが表示されます。 [] が付いているものが現在のトリガです。
以下のコマンドを実行すると、心拍のように点灯/消灯を行います。 Armadillo-IoT ゲートウェイ G4 の LTE 搭載モデルには、3G/LTE モデム Quectel 製 EC25-J が搭載されています。 -
機能
-
3G/LTE 通信
-
リセットドライバによる EC25-J の電源制御
-
LEDによる状態確認
-
インターフェース仕様(CON21, CON22)
CON21 及び CON22 は3G/LTEモジュール用アンテナケーブルを接続するためのインターフェースです。 | |
|---|
アンテナ端子にアンテナケーブルを接続する際、無理な力を加えると破壊の原因となりますので、十分にご注意ください。 |
-
インターフェース仕様(CON23)
CON23は、3G/LTEモジュール用nanoSIMインターフェースです。 表3.40 CON23 信号配列 | ピン番号 | ピン名 | I/O | 説明 |
|---|
1 | GND | Power | 電源(GND) | 2 | SIM_VCC | Power | SIM電源出力、3G/LTEモジュールのSIMインターフェースに接続 | 3 | SIM_RST | Out | SIMリセット、3G/LTEモジュールのSIMインターフェースに接続 | 4 | SIM_CLK | Out | SIMクロック、3G/LTEモジュールのSIMインターフェースに接続 | 5 | SIM_VPP | - | 未接続 | 6 | SIM_I/O | In/Out | SIMデータ、3G/LTEモジュールのSIMインターフェースに接続 |
| |
|---|
CON23は活線挿抜に対応しておりません。nanoSIMカードの挿抜は、本製品の電源を切断した状態で行ってください。 |
-
インターフェース仕様(LED20)
LED20は、3G/LTEモジュールの通信状態を示すLEDです。
表3.42 LED20の状態 | 状態 | 説明 |
|---|
消灯 | パワーオフ状態 | 点滅((200ms 点灯/1800ms 消灯) | ネットワーク探索状態 | 点滅(1800ms 点灯/200ms 消灯) | 待機状態 | 点滅(125ms 点灯/125ms 消灯) | 通信状態 |
-
デバイスファイル
-
/dev/ttyUSB0
-
/dev/ttyUSB1
/dev/ttyUSB2
-
ModemManager が
/dev/ttyCommModem のシンボリックリンクを作成し AT コマンド用ポートとして使用します。
-
/dev/ttyUSB3
-
/dev/ttymxc3
| |
|---|
ttyUSB[0-3] は、他の USB デバイスを接続している場合、番号が変わる可能性があります。 |
3G/LTE モデム Quectel 製 EC25-J に対して、以下の制御が可能です。 EC25-J は、Armadillo 起動時に自動的に電源が投入され、 Armadillo が終了する際には自動的に電源が切られます。 また、「3G/LTE再接続サービス」 でも、通信状態に応じて EC25-J のリセットなどを実施しますので処理が重複しないように、下記制御を実施する際には、図6.174「3G/LTE 再接続サービスを停止する」の手順を参考に再接続サービスを停止してから実施してください。 |
動作中は running が表示されます。
| |
停止中は off が表示されます。
|
ネットワークの設定方法については「ネットワーク設定」を参照してください。 ここでは、Wi-SUN デバイスが UART で接続されている場合の例を示します。
この場合、コンテナ内で動作するアプリケーションから Wi-SUN デバイスで通信を行うためには、
Podman のイメージからコンテナを作成する際にホスト OS 側のデバイスファイル /dev/ttymxcN のうち、
Wi-SUN と対応するものを渡す必要があります。
以下は、/dev/ttymxc0 を渡して alpine イメージからコンテナを作成する例です。 コンテナ内から、/dev/ttymxc0 を使って Wi-SUN データの送受信ができるようになります。 ここでは、EnOcean デバイスが UART で接続されている場合の例を示します。
この場合、コンテナ内で動作するアプリケーションから EnOcean デバイスで通信を行うためには、
Podman のイメージからコンテナを作成する際にホスト OS 側のデバイスファイル /dev/ttymxcN のうち、
EnOcean と対応するものを渡す必要があります。
以下は、/dev/ttymxc0 を渡して alpine イメージからコンテナを作成する例です。 コンテナ内から、/dev/ttymxc0 を使って EnOcean データの送受信ができるようになります。 Armadillo-IoT ゲートウェイ G4 を用いた製品のソフトウェア設計は、一般的な組み込み開発と基本的には変わりません。
しかし、 Armadillo Base OS という独自OSを搭載しているため、ソフトウェアの設計には特有のポイントがいくつかあります。
本章では、それらの設計時に考慮すべき Armadillo Base OS 特有のポイントについて紹介していきます。 3.7.1. 開発者が開発するもの、開発しなくていいものArmadillo Base OS では、組み込み機器において必要になる様々な機能を標準で搭載しています。 図3.100「開発者が開発するもの、開発しなくていいもの」は、 Armadillo Base OS 搭載製品において、開発者が開発するものと開発しなくていいものをまとめた図です。 開発しなくていいものについては設計を考える必要はありません。
開発するものに絞って設計を進めることができます。 ユーザーアプリケーションのログは、不具合発生時の原因究明の一助になるため必ず残しておくことを推奨します。 ユーザーアプリケーションが出力するログは、「電源を切っても保持されるディレクトリ(ユーザーデータディレクトリ)」にも記載があるとおり、 /var/app/volumes/ 以下に配置するのが良いです。 コンテナの中から /var/app/volumes/ ディレクトリにアクセスすることになります。
手順についての詳細は実際に開発を行う箇所にて紹介します。
Ethernet、LTE、BT、WLANなどのネットワーク系のログ
一般に不具合発生時によく疑われる箇所なので、最低でも接続・切断情報などのログを残しておくことをおすすめします。
ソフトウェアのバージョン
/etc/sw-versions というファイルが Armadillo Base OS 上に存在します。
これは、 SWUpdate に管理されている各ソフトウェアのバージョンが記録されているファイルです。
このファイルの内容をログに含めておくことで、当時のバージョンを記録することができます。
A/B 面どちらであったか
アップデート後になにか不具合があって、自動的にロールバックしてしまう場合があります。
後でログを確認する際に、当時 A/B 面どちらであったかで環境が大きく変わってしまい解析に時間がかかる場合があるので、どちらの面で動作していたかをログに残しておくことをおすすめします。 図3.101「現在の面の確認方法」に示すコマンドを実行することで、現在 A/B どちらの面で起動しているかを確認できます。
|
この実行結果から今の面は/dev/mmcblk2p1であることが分かります。
|
必要であれば、 Armadillo のネットワークの設定を行います。 Armadillo Base OS(以降、 ABOS) には、 Armadillo と作業用 PC が同一 LAN 内に存在していれば Web ブラウザからネットワークの設定や、 SWU イメージのインストールなどを行うことが可能となる、 ABOS Web という機能があります。
この機能は、バージョン v3.17.4-at.7 以降の ABOS に標準で組み込まれています。 現在、ネットワークに関して ABOS Web で設定できるのは以下のものです。 -
WWAN設定
-
WLAN設定
-
各接続設定(各ネットワークインターフェースの設定)
-
DHCPサーバー設定
-
NAT設定
-
VPN設定
LTE モジュールを搭載した Armadillo をお使いで、LTE モジュールによる WWAN 接続でインターネットにアクセスする場合に、Armadillo に LAN で接続した機器から Armadillo をルーターとして利用したい場合には、NAT設定機能が役に立つでしょう。
LTE モジュールによる WWAN 通信でクラウドサービスに接続し、WLAN や LAN で接続した機器から集めたデータをクラウドサービスに転送したり、それらの機器を、クラウドサービスから Armadillo 経由で遠隔制御するようなシステムを構成する場合にご利用ください。 以下では、 ABOS Web を利用した各種ネットワーク設定の方法について紹介します。 Armadillo と PC を有線 LAN で接続して、Armadillo の電源を入れて PC で Web ブラウザを起動したら、Web ブラウザのアドレスバーに次の URL を入力してください。
https://armadillo.local:58080 | |
|---|
ABOS Web が動作する Armadillo が、同じ LAN 上に複数あると、ABOS Web に接続する URL のホスト名部分(armadillo.local)は、2台めでは armadillo-2.local、3台めでは armadillo-3.local のように、違うものが自動的に割り当てられます。
どのホスト名が、どの Armadillo のものなのかを判別するのが難しいので、複数台の Armadillo で同時に ABOS Web を動かすときは、LAN に固定 IP アドレスを設定して、IP アドレスで指定できるようにするのがよいでしょう。 また、VSCode 上で ABOSDE(Armadillo Base OS Development Environment) から、ABOS Web が動作している Armadillo の一覧を確認し、図3.102「ABOSDE を使用して ABOS Web を開く」 の赤枠で囲われているマークをクリックすることで、指定した Armadillo の ABOS Web を Web ブラウザ で開くことが出来ます。
ただし、ATDE のネットワークを NAT に設定している場合は Armadillo がリストに表示されません。
図3.103「ABOSDE に表示されている Armadillo を更新する」 の赤枠で囲われているマークをクリックすることで、ABOSDE に表示されている Armadillo を更新することができます。
|
「initial_setup.swu の作成」で ABOS Web のログイン用パスワードを設定していない場合、 ABOS Web 初回ログイン時に、 "初回ログイン"のパスワード登録画面が表示されますので、パスワードを設定してください。 "初回ログイン"のパスワード登録画面で、"パスワード" フィールドと "パスワード(確認)" フィールドに、登録したいパスワードを入力してから、"登録" ボタンをクリックしてください。
パスワード登録完了画面が表示されたら、パスワード登録の完了です。 パスワード登録完了画面にある "ログインページ" というリンクをクリックすると、ログイン画面が表示されますので、先ほど登録したパスワードを入力して "ログイン" ボタンをクリックしてください。 ABOS Web に対応した Armadillo が正常に起動していれば、Web ブラウザに ABOS Web のログイン画面が表示されます。 ログイン画面で ABOS Web のパスワードを入力して認証されれば、ABOS Web の設定画面に表示が変わり、設定操作を行うことができます。 ABOS Web で Armadillo の動作設定を行うには、ログイン後に表示されるトップページで、設定したい機能へのリンクをクリックしてください。
リンクをクリックすると、リンク先の設定画面が表示されますので、設定画面で、現在の設定内容の確認や設定変更を行ってください。
現在の設定内容を確認するには、"各接続設定"をクリックしてください。
各機能の設定ページへのリンクは、それぞれの設定ページでも、左端にサイドメニュー形式で表示されます。
以後、サイドメニュー形式で表示されたリンクをクリックすることを、「サイドメニューから xxx を選択する」と表記します。
ログイン後に表示されるトップページと、それぞれの設定ページには、左端のサイドメニューに加え、上端右側に、現在の接続状態が表示されます。
現在の接続状態は、WWAN、WLAN、LAN、のそれぞれについて表示されます。
WWAN と WLAN は、それらの通信モジュールが Armadillo に搭載されていなければ、表示されません。 ABOS Web で必要なセットアップを行なったら、サイドメニューから "ログアウト" を選択してログアウトしてください。
ログアウトすると、ログイン画面が再び表示されますので、ABOS Web をすぐに使わないのであれば、Web ブラウザを閉じてください。 LTE をはじめとする WWAN 通信モジュールを搭載した Armadillo の、WWAN 設定を行います。
この設定画面では、WWAN 接続設定の登録と、WWAN 接続の状態(現在のアドレス情報)の表示、登録済み WWAN 接続設定の編集と削除を行うことができます。
設定項目のうち、"MCC/MNC" は、通常は空欄にしてください。
MCC/MNC 以外の項目を正しく設定しても WWAN 通信が動作しない場合、特に SIM カードがマルチキャリア SIM の場合は、ご契約の通信事業者に MCC/MNM を問い合わせ、通信事業者から提示された MCC/MNC の値を設定してください。
それぞれの入力フィールドに設定値を入力して "接続して保存" ボタンをクリックすると、WWAN 接続の設定を登録して、WWAN 接続動作を実行します。
WWAN 通信設定が行われ、ネットワーク接続が確立した状態では、割当たっている IP アドレスなどを "現在のWWAN接続情報" に表示します。
図3.108「WWAN設定画面」に、WWAN 設定を行った状態を示します。 無線 LAN モジュールを搭載した Armadillo の、WLAN(無線 LAN)設定を行います。
この設定画面では、WLAN クライアント(子機)としての設定または、WLAN アクセスポイントとしての設定を行うことができます。
クライアントとアクセスポイントのどちらか一方について、接続設定の登録と接続の状態の表示、登録済み設定の削除を行なえます。
クライアントとアクセスポイントのどちらに設定するかは、"動作モード選択"欄で指定します。 クライアント設定とアクセスポイント設定の、それぞれについて、以下に説明します。 3.8.7.1. WLAN 設定(クライアントとしての設定)"動作モード選択"欄で"クライアントとして使用する"を選択すると、クライアント設定画面が表示されます。
もしアクセスポイントに設定済みの場合は、アクセスポイントの設定を削除してください。
そうしないと、動作モードをクライアントに切り替えることができません。
設定項目のうち、ネットワーク名(SSID) は、リストから選択してください。
WLAN アクセスポイントを Armadillo が何も検出できない場合は、このリストが空になります。
セキュリティ方式も、リストから選択してください。
DHCP と 固定 は、DHCP を選択すると DHCP サーバーから IP アドレスを取得します。
固定 を選択すると、固定 IP アドレス設定用の入力フィールドを表示します。
それぞれの入力フィールドに設定値を入力して "接続して保存" ボタンをクリックすると、WLAN クライアント設定を登録して、WLAN 接続動作を実行します。
WLAN 接続設定が行われ、WLAN 接続が確立した状態では、割当たっている IP アドレスなどを "現在のWLAN接続情報" に表示します。 ABOS-WEB上では複数のネットワーク設定を保存することが可能です。
設定項目のうちにネットワーク情報を入力した後、 "保存" ボタンをクリックすると、入力した内容の登録のみを行い、接続は行いません。
登録した設定の一覧は WLAN ページの中央にあるリストに表示されます。
このリストでは WLAN 設定の接続/編集/削除を行うことができます。
保存した設定に接続先を変更したい場合はリストから選択して、"接続" ボタンをクリックしてください。
保存した設定を編集したい場合はリストから選択して、"設定を編集" ボタンをクリックしてください。
保存した設定を削除したい場合はリストから選択して、"設定を削除" ボタンをクリックしてください。 図3.109「WLAN クライアント設定画面」に、WLAN クライアント設定を行った状態を示します。 登録済み WLAN クライアント設定を削除して、WLAN アクセスポイントとの接続を切断するには、"設定を削除" ボタンをクリックしてください。 3.8.7.2. WLAN 設定(アクセスポイントとしての設定)"動作モード選択"欄で"アクセスポイントとして使用する"を選択すると、アクセスポイント設定画面が表示されます。
もしクライアントに設定済みの場合は、クライアントの設定を削除してください。
そうしないと、動作モードをアクセスポイントに切り替えることができません。
設定項目のうち、ブリッジアドレス は、WLAN アクセスポイントに割り当てる IP アドレスを入力してください。
サブネットマスク は、アクセスポイントのサブネットのものを入力してください。
使用周波数は、5GHz と 2.4GHz のうち使用するものを選択してください。
両方の周波数を同時に使用することはできません。
使用チャンネルは、リストから選択してください。
SSID と パスワード に入力した値は、アクセスポイントに設定した Armadillo に WLAN 子機を接続する際に使用します。 それぞれの入力フィールドに設定値を入力して "設定" ボタンをクリックすると、WLAN アクセスポイント設定を登録して、WLAN アクセスポイント動作を開始します。
WLAN アクセスポイント設定が行われ、アクセスポイント動作中の状態では、"現在のアクセスポイント情報" に設定内容を表示します。 図3.110「WLAN アクセスポイント設定画面」に、WLAN アクセスポイント設定を行った状態を示します。 | |
|---|
アクセスポイントモードのセキュリティ方式は、WPA2 を使用します。 |
3.8.8. 各接続設定(各ネットワークインターフェースの設定)設定されたネットワーク接続の一覧を表示します。表示した接続のそれぞれについて、接続の有効化(「接続」)や無効化(「切断」)、および接続設定内容の編集や削除を行うことができます。
接続の操作を行う時は、操作したい接続をラジオボタンで選択してください。 ここで、「ネットワーク接続」は、Linux のネットワーク接続管理機能(NetworkManager)が管理するコネクションです。
ネットワーク接続に対する設定項目の詳細は、NetworkManager のリファレンス(https://developer-old.gnome.org/NetworkManager/stable/nmcli.html)をご覧ください。
接続設定内容を編集したい接続を選択して "設定を編集" ボタンをクリックすると、設定内容の編集画面を表示します。
LAN の接続以外、つまり、WWANと WLAN の接続に対する設定は、"WWAN設定" や "WLAN設定" の設定画面をお使いいただくのが簡単です。 それぞれの接続設定画面では、IPv4 と IPv6 のそれぞれについて、IP アドレスを自動割り当てするかまたは固定 IP アドレスにするかを選択して設定できます。
IP アドレスの割り当ては、デフォルトでは自動割り当てです。
Armadillo を接続した LAN や WLAN で、Armadillo を DHCP サーバーとして運用する場合は、それらのネットワーク接続を固定 IP アドレスに設定してください。 LAN 接続の接続名は、デフォルトでは "Wired conneciton 1" です。
LAN ポートを二つ搭載した Armadillo では、二つめの LAN ポートに対応する "Wired connection 2" も有効です。
Armadillo を LAN と WWAN との間で IPv4 ルーターとして運用する場合は、LAN 接続の設定で IPv4 アドレスを固定 IP アドレスに設定して下さい。
図3.112「LAN 接続設定で固定 IP アドレスに設定した画面」に、LAN 接続の設定編集画面で固定 IP アドレスに設定した状態を示します。 WWAN 接続の接続名は、デフォルトでは "gsm-ttyCommModem" です。 WLAN 接続の接続名は、デフォルトでは、クライアントモードが "abos_web_wlan"、アクセスポイントモードが "abos_web_br_ap" です。 ネットワークインターフェースごとに、接続したネットワーク上で Armadillo を DHCP サーバーとして動作させる設定を行うことができます。
接続済みの DHCP サーバー情報を、画面上部の"現在のDHCP情報"に表示します。
DHCPサーバーの設定を登録する場合は、"DHCP情報入力"欄に設定内容を入力して"設定"ボタンをクリックしてください。
図3.113「eth0 に対する DHCP サーバー設定」に、一つめの LAN ポート(eth0)に対する設定を行った状態を示します。 たとえば、LAN ポートが二つある Armadillo で、それぞれの LAN ポートを異なる LAN に接続して、それぞれの LAN 上で Armadillo を DHCP サーバーとして運用する場合は、eth0 と eth1 に対して DHCP サーバー設定を行ってください。
DHCP サーバー設定を削除するには、"現在のDHCP情報"の一覧で削除したい設定を選択して、"削除"ボタンをクリックしてください。 この設定画面では、ルーター機能での宛先インターフェース設定と、Armadillo を接続した LAN 上の機器用のポートフォワーディング設定を行うことができます。
Armadillo を LAN や WLAN と WWAN との間でルーターとして運用する場合は、NAT設定の宛先インターフェースを WWAN のインターフェースに設定してください。
そして、LAN や WLAN 上の機器を、WWAN 接続したインターネットにサーバーとして公開したい場合は、ポートフォワーディング設定を使ってください。 Armadillo の VPN 接続設定を行います。
この設定画面では、認証方式や VPN クライアントの設定ファイル、認証用の証明書と鍵の設定を行うことができます。
VPN 接続を設定していれば、現在の接続状態も表示します。
現在の接続状態表示欄にある "接続" ボタンと "切断" ボタンで、VPN 接続の接続と切断を行なえます。
VPN クライアントは、現在 OpenVPN をサポートしています。 図3.116「VPN 設定」に、VPN 接続設定を行った状態を示します。 認証方式は、"ユーザ名とパスワード" と "証明書" のどちらか一方を選択できます。
認証方式が "証明書" の場合、.ovpn ファイルに証明書や鍵が埋め込まれていれば、それらのファイルを指定する必要はありません。 ABOS Web は、VPN 接続を設定する際に abos_web_openvpn という名前のコンテナを自動的に作成し、このコンテナで VPN クライアントを実行します。
VPN 接続動作を実行する時には、進行状況を示すログを表示します。 登録済み VPN 設定を削除して、VPN 接続を切断するには、"設定を削除" ボタンをクリックしてください。 各設定画面で行った設定の現在状態を、設定ごとに区切って一覧表示します。 ここでは Armadillo の性能を最大限に生かした GUI アプリケーションを
作ることのできる Flutter を使った開発方法を紹介します。 Flutterとはモバイルアプリケーションや Web アプリケーションの開発に使われる
GUI アプリケーション開発ツールキットです。
マルチプラットフォームなので、ソースコードの大部分を共通化可能で一度開発したアプリケーションは最小限の工数で別の
プラットフォームへ移植できます。さらに、プラットフォーム間でアプリケーションの見た目も統一することができます。
アプリケーション開発言語として Dart を使用しています。 Flutter を使うことで Armadillo 上でも GUI アプリケーションを開発することができます。
以下は Flutter で開発したアプリケーションを Armadillo 上で動かしている例です。 Armadillo 向けに Flutter アプリケーションを開発する場合の流れは以下のようになります。 ここでは、開発開始時の ATDE 上でのセットアップ手順について説明します。
ATDE をお使いでない場合は、先に 「開発の準備」 を参照して ATDE のセットアップを完了してください。 Flutter アプリケーションのサンプルとして以下を用意しております。 -
Flutter Demo アプリケーション
-
GUI アプリケーション
-
Signage アプリケーション
-
Factory Signage アプリケーション
各プロジェクトは以下のようなアプリケーションの画面となります。 | |
|---|
以降の手順でサンプルアプリケーション毎に VSCode でクリックする箇所や生成されるファイル名等が変わります。 |
VSCode の左ペインの [G4/X2] から [<アプリケーション名> New Project]を実行し、表示されるディレクトリ選択画面からプロジェクトを保存するディレクトリを選択してください。実行するためには右に表示されている三角形ボタンを押してください。
保存先を選択すると、プロジェクト名を入力するダイアログが表示されるので、任意のプロジェクト名を入力してエンターキーを押してください。
ここでは、ホームディレクトリ直下に my_project として保存しています。
以下では例として [GUI アプリケーション] の作成を行っています。 初期設定では主に Armadillo と SSH で接続するための秘密鍵と公開鍵の生成を行います。 作成したプロジェクトディレクトリへ移動して VSCode を起動してください。 VSCode の左ペインの [my_project] から [Setup environment] を実行します。 選択すると、 VSCode の下部に以下のようなターミナルが表示されます。 このターミナル上で以下のように入力してください。 |
パスフレーズを設定します。設定しない場合は何も入力せず Enter を押します。
| |
ここで何か任意のキーを押すとターミナルが閉じます。
|
パスフレーズを設定した場合は、アプリケーションを Armadillo へ転送する時にパス
フレーズの入力を求められることがあります。 3.9.3.3. アプリケーション実行用コンテナイメージの作成Armadillo 上でアプリケーションを実行するためのコンテナイメージを作成します。
ここで作成したコンテナイメージは SWU イメージを使用して Armadillo へインストールするため、
事前に mkswu を参照して SWU の初期設定を行ってください。 コンテナイメージの作成および SWU イメージの作成も VSCode で行います。
VSCode の左ペインの [my_project] から [Generate development swu] を実行します。 コンテナイメージの作成にはしばらく時間がかかります。
VSCode のターミナルに以下のように表示されるとコンテナイメージの作成は完了です。 作成した SWU イメージは my_project/container/dev ディレクトリ下に gui_app_dev_image.swu という
ファイル名で保存されています。 3.9.4. Armadillo 上でのセットアップFlutter アプリケーションのビルドモードには Debug、 Profile、 Release の3種類があり、
VSCode からは Debug、Release モードの実行が可能です。
Debug モードでビルドしたアプリケーションは後述するホットリロード等のデバッグ機能を用いて、
効率的に開発が可能ですが、アプリケーションの動作が重くなります。
特に動画やアニメーションの動作に大きく影響が出ますので、
その場合は Release モードで動作を確認してください。 3.9.5.2. サンプルアプリケーションのビルドFlutter のサンプルアプリケーションのビルド方法を説明します。
プロジェクトディレクトリへ移動し VSCode を起動します。 VSCode の左ペインの [my_project] から [Debug app run on ATDE] を実行すると、
Debug モードでアプリケーションがビルドされ ATDE 上で起動します。 | |
|---|
flutter-elinux をイントール後に初めてビルドを実行する時は、必要なファイルのダウンロード処理が行われるため、
アプリケーションが起動するまでに時間がかかります。 |
GUI アプリケーションの場合は以下のようなアプリケーションが起動します。 アプリケーションを終了するにはウィンドウ右上の X ボタンを押してください。 また、Release モードでアプリケーションを実行するには、VSCode の左ペインの [my_project] から [Release app run on ATDE] を実行してください。 サンプルアプリケーションのソースコードは、 app/lib にあります。
サンプルアプリケーションをベースとして開発を進める場合は、 app/lib 下にソースコードを
保存してください。 Flutter には様々な機能を実現するためのパッケージが豊富に存在しており、
主に こちらのサイトで見つけることができます。 目的のパッケージをアプリケーションで使えるようにするためには、
アプリケーションディレクトリの中で以下のコマンドを実行します。
例として dart_periphery パッケージをインストールします。 video_player や camera など以下に挙げたパッケージは、
ATDE 内の /opt/flutter-elinux-packages にあるパッケージと組み合わせて使う必要があります。 表3.43 組み合わせて使うパッケージ | パッケージ名 | /opt/flutter-elinux-package 内のパッケージ名 |
|---|
video_player | video_player_elinux | camera | camera_elinux | path_provider | path_provider_elinux | shared_preferences | shared_preferences_elinux | なし | joystick |
これらのパッケージをインストールする場合は以下のようにインストールしてください。 パッケージをアンインストールする場合は pub remove を実行します。 ここでは、実際に Armadillo 上でアプリケーションを起動する場合の手順を説明します。 3.9.6.1. ssh 接続に使用する IP アドレスの設定VSCode 上で ABOSDE(Armadillo Base OS Development Environment) から、ABOS Web が動作している Armadillo の一覧を確認し、図3.138「ABOSDE を使用して ssh 接続に使用する IP アドレスを設定する」 の赤枠で囲われているマークをクリックすることで、指定した Armadillo の IP アドレスを ssh 接続に使用します。
ただし、ATDE のネットワークを NAT に設定している場合は Armadillo がリストに表示されません。 図3.139「ABOSDE に表示されている Armadillo を更新する」 の赤枠で囲われているマークをクリックすることで、ABOSDE に表示されている Armadillo を更新することができます。 ATDE のネットワークを NAT に設定している場合や、ABOS Web を起動していない場合等、ABOSDE のリストに Armadillo が表示されない場合は、
プロジェクトディレクトリに入っている config/ssh_config ファイルを編集して
IP アドレスを書き換えてください。 |
Armadillo の IP アドレスに置き換えてください。
|
VSCode の左ペインの [my_project] から [Debug app run on Armadillo] を実行すると、
Debug モードでビルドされたアプリケーションが Armadillo へ転送されて起動します。 VSCode のターミナルに以下のメッセージが表示されることがあります。
これが表示された場合は yes と入力して下さい。 アプリケーションを終了するには VSCode の左ペインの [my_project] から [App stop on Armadillo] を実行してください。 また、Release モードでアプリケーションを実行するには、VSCode の左ペインの [my_project] から [Release app run on Armadillo] を実行してください。 アプリケーションのソースコードに修正を加えた後にコンパイルをせずに即座に動作確認をしたい場合、
ホットリロード機能を使うことができます。
この機能を使うには Debug モードでアプリケーションをビルドしている必要があります。 ホットリロード機能を使うには、アプリケーション実行時に表示される VSCode のターミナルで r を入力してください。
その後、以下のようなメッセージが表示され修正が反映されます。 ここでは完成したアプリケーションをリリース版としてビルドする場合の手順について説明します。 VSCode の左ペインの [my_project] から [App build for release] を実行すると、
リリース版のアプリケーションがビルドされます。 実行ファイルを含むビルド生成物は app/build/elinux/arm64/release/bundle/ ディレクトリ下に保存されています。 リリース版のアプリケーションを含んだ SWU イメージを作成します。
事前に 「SWUイメージの作成」 を参照して SWU の初期設定を行ってください。 VSCode の左ペインの [my_project] から [Generate release swu] を実行すると SWU イメージが作成されます。 作成した SWU イメージは my_project/container/release ディレクトリ下に gui_app_rel_image.swu という
ファイル名で保存されています。 この SWU イメージを 「SWU イメージのインストール」 を参照して Armadillo へインストールすると、
Armadillo 起動時にアプリケーションも自動起動します。 ここではシェルスクリプトおよび Python を使った CUI アプリケーションの開発方法を紹介します。
開発手順としてはシェルスクリプトと Python で同じであるため、シェルスクリプトの場合の例で説明します。 3.10.1. CUI アプリケーション開発の流れArmadillo 向けに CUI アプリケーションを開発する場合の流れは以下のようになります。 ここでは、開発開始時の ATDE 上でのセットアップ手順について説明します。
ATDE をお使いでない場合は、先に 「開発の準備」 を参照して ATDE 及び、 VSCode のセットアップを完了してください。 VSCode の左ペインの [G4/X2] から [Shell New Project] を実行し、表示されるディレクトリ選択画面からプロジェクトを保存する
ディレクトリを選択してください。実行するためには右に表示されている三角形ボタンを押してください。
Python の場合は [Python New Project] を実行してください。
保存先を選択すると、プロジェクト名を入力するダイアログが表示されるので、任意のプロジェクト名を入力してエンターキーを押してください。
ここでは、ホームディレクトリ直下に my_project として保存しています。 初期設定では主に Armadillo と SSH で接続するための秘密鍵と公開鍵の生成を行います。 作成したプロジェクトディレクトリへ移動して VSCode を起動してください。 VSCode の左ペインの [my_project] から [Setup environment] を実行します。 選択すると、 VSCode の下部に以下のようなターミナルが表示されます。 このターミナル上で以下のように入力してください。 |
パスフレーズを設定します。設定しない場合は何も入力せず Enter を押します。
| |
1 でパスフレーズを設定した場合は、確認のため再度入力してください。
| |
ここで何か任意のキーを押すとターミナルが閉じます。
|
パスフレーズを設定した場合は、アプリケーションを Armadillo へ転送する時にパス
フレーズの入力を求められることがあります。 | |
|---|
ssh の鍵は $HOME/.ssh/id_ed25519_vscode (と id_ed25519_vscode.pub ) に保存されていますので、
プロジェクトをバックアップする時は $HOME/.ssh も保存してください。 |
3.10.2.3. アプリケーション実行用コンテナイメージの作成Armadillo 上でアプリケーションを実行するためのコンテナイメージを作成します。
ここで作成したコンテナイメージは SWU イメージを使用して Armadillo へインストールするため、
事前に 「SWUイメージの作成」 を参照して SWU の初期設定を行ってください。 コンテナイメージの作成および SWU イメージの作成も VSCode で行います。
VSCode の左ペインの [my_project] から [Generate development swu] を実行します。 コンテナイメージの作成にはしばらく時間がかかります。
VSCode のターミナルに以下のように表示されるとコンテナイメージの作成は完了です。 |
Dockerfile やパッケージリストを変更した場合のみにコンテナを再作成してください。
|
作成した SWU イメージは my_project/swu ディレクトリ下に dev.swu という
ファイル名で保存されています。 3.10.3. Armadillo 上でのセットアップここでは、実際に Armadillo 上でサンプルアプリケーションを起動する場合の手順を説明します。
プロジェクトディレクトリへ移動し VSCode を起動します。 プロジェクトにいくつかのディレクトリがあります。 -
app: アプリケーションのソースです。Armadillo では /var/app/rollback/volumes/shell_app または python_app にそのままコピーされます。
-
config: 開発モードのための設定ファイルです。「ssh 接続に使用する IP アドレスの設定」 を参照してください。
-
container: スクリプトを実行するコンテナの設定ファイルです。 packages.txt に記載されているパッケージがインストールされます。 Dockerfile を直接編集することも可能です。
-
scripts: VSCode のコマンドに使われているスクリプト類です。編集された場合はサポート対象外となります。
-
swu: mkswu のためのテンプレートとコンテナのコンフィグファイルがあります。 shell_app または python_app のディレクトリの内容はそのまま SWU に組み込まれます。その中の etc/atmark/containers/shell_app.conf または python_app.conf に使われているボリュームやデバイス等が記載されていますので必要な場合に編集してください。
デフォルトのコンテナコンフィグでは app の src/main.sh または Python の場合に src/main.py を実行しますので、リネームが必要な場合にコンテナのコンフィグも修正してください。 このサンプルアプリケーションは、CPU と SOC の温度を /vol_data/log/temp.txt に出力し、
LED3 を点滅させます。 3.10.4.3. ssh 接続に使用する IP アドレスの設定VSCode 上で ABOSDE(Armadillo Base OS Development Environment) から、ABOS Web が動作している Armadillo の一覧を確認し、図3.158「ABOSDE を使用して ssh 接続に使用する IP アドレスを設定する」 の赤枠で囲われているマークをクリックすることで、指定した Armadillo の IP アドレスを ssh 接続に使用します。
ただし、ATDE のネットワークを NAT に設定している場合は Armadillo がリストに表示されません。 図3.159「ABOSDE に表示されている Armadillo を更新する」 の赤枠で囲われているマークをクリックすることで、ABOSDE に表示されている Armadillo を更新することができます。 ATDE のネットワークを NAT に設定している場合や、ABOS Web を起動していない場合等、ABOSDE のリストに Armadillo が表示されない場合は、
プロジェクトディレクトリに入っている config/ssh_config ファイルを編集して
IP アドレスを書き換えてください。 |
Armadillo の IP アドレスに置き換えてください。
|
| |
|---|
Armadillo を初期化した場合や、プロジェクトを実行する Armadillo を変えた場合は,
プロジェクトの config/ssh_known_hosts に保存されている公開鍵で Armadillo を認識できなくなります。
その場合はファイルを削除するか、「Setup environment」タスクを再実行してください。 |
VSCode の左ペインの [my_project] から [App run on Armadillo] を実行すると、
アプリケーションが Armadillo へ転送されて起動します。 VSCode のターミナルに以下のメッセージが表示されることがあります。
これが表示された場合は yes と入力して下さい。 アプリケーションを終了するには VSCode の左ペインの [my_project] から [App stop on Armadillo] を実行してください。 ここでは完成したアプリケーションをリリース版としてビルドする場合の手順について説明します。 VSCode の左ペインの [my_project] から [Generate release swu] を実行すると、
リリース版のアプリケーションを含んだ SWU イメージが作成されます。
事前に 「SWUイメージの作成」 を参照して SWU の初期設定を行ってください。 作成した SWU イメージは my_project/swu ディレクトリ下に release.swu というファイル名で保存されています。 この SWU イメージを 「SWU イメージのインストール」 を参照して Armadillo へインストールすると、
Armadillo 起動時にアプリケーションも自動起動します。 Armadillo 上で動作するシステムの開発が完了したら、製造・量産に入る前に開発したシステムのテストを行ってください。 テストケースは開発したシステムに依ると思いますが、 Armadillo で開発したシステムであれば基本的にテストすべき項目について紹介します。 長期間のランニングテストは実施すべきです。 ランニングテストで発見できる現象としては、以下のようなようなものが挙げられます。
長期間稼働することでソフトウェアの動作が停止してしまう
開発段階でシステムを短い時間でしか稼働させていなかった場合、長期間ランニングした際になんらかの不具合で停止してしまう可能性が考えられます。 開発が完了したら必ず、長時間のランニングテストでシステムが異常停止しないことを確認するようにしてください。 コンテナの稼働情報は podman stats コマンドで確認することができます。
メモリリークが発生する
アプリケーションのなんらかの不具合によってメモリリークが起こる場合があります。 また、運用時の Armadillo は基本的に overlayfs で動作しています。
そのため、外部ストレージやボリュームマウントに保存している場合などの例外を除いて、動作中に保存したデータは tmpfs (メモリ)上に保存されます。
よくあるケースとして、動作中のログなどのファイルの保存先を誤り、 tmpfs 上に延々と保存し続けてしまうことで、メモリが足りなくなってしまうことがあります。 長時間のランニングテストで、システムがメモリを食いつぶさないかを確認してください。 メモリの空き容量は図3.165「メモリの空き容量の確認方法」に示すように free コマンドで確認できます。
開発したシステムが、想定した条件下で正しく動作することは開発時点で確認できていると思います。
しかし、そのような正常系のテストだけでなく、正しく動作しない環境下でどのような挙動をするのかも含めてテストすべきです。 よくあるケースとしては、動作中に電源やネットワークが切断されてしまった場合です。 電源の切断時には、 Armadillo に接続しているハードウェアに問題はないか、電源が復旧した際に問題なくシステムが復帰するかなどをよくテストすると良いです。 ネットワークの切断時には、再接続を試みるなどの処理が正しく実装されているか、 Armadillo と サーバ側でデータなどの整合性が取れるかなどをよくテストすると良いです。 この他にもシステムによっては多くの異常系テストケースが考えられるはずですので、様々な可能性を考慮しテストを実施してから製造・量産ステップに進んでください。 | |
| | | |
| |