モジュールは Armadillo のユーザーランドに配置された start/stop/reconfig/command といった オペレーション を受け付けるスクリプトとして実装されています。
モジュールにはバイナリモジュール(BIN module)、コマンドラインインターフェースモジュール(CLI module)の2種類あり、16個のモジュールが用意されています。
表4.3 モジュールのタイプとその用途
| No. | Module type | 用途 |
|---|
| 0 - 3 | CLI module | アットマークテクノが提供する機能に使用 |
| 4 - 7 | CLI module | お客様が自由に使用 |
| 8 - 11 | BIN module | お客様が自由に使用 |
| 12 - 15 | CLI module | お客様が自由に使用 |
CLI moduleは、SACM上で直接、モジュールのコンフィグを編集、参照することができます。
バイナリモジュールは、SACM上でコンフィグの内容を直接参照することはできず、ダウンロードとアップロードのみが可能です。
また、コマンドラインインターフェースモジュールのコンフィグで扱えるのは、US-ASCII のテキストのみに限られます。
日本語などのマルチバイト文字が含まれる場合、バイナリモジュールで取り扱う必要があります。
モジュールのコンフィグについては SACM コンフィグの概念 を参照してください。
モジュール0 ~ 3はアットマークテクノが提供する機能(ネットワーク設定、ファームウェア管理など)に使用しています。
モジュール0 ~ 3に変更を加えることは可能ですが、変更を加えた場合にはアットマークテクノから提供する機能(サービス等)を受けられなくなる場合があります。
現在、アットマークテクノから提供しているモジュールを表に示します。
表4.4 アットマークテクノが提供しているモジュール一覧
| No. | Module type | Module name | 用途 |
|---|
| 0 | CLI module | ネットワークモジュール | ネットワークインターフェースの設定に使用 |
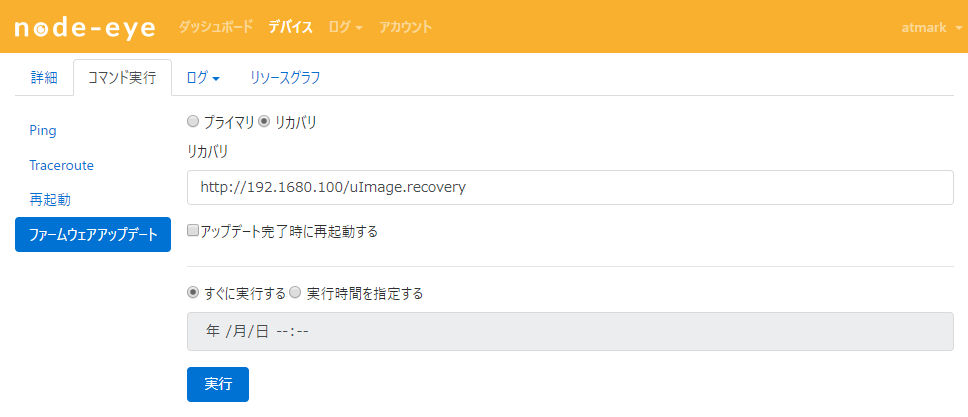
| 1 | CLI module | ファームウェアモジュール | ファームウェアアップデートに使用 |
モジュール4 ~ 15 はお客様が自由に使用することができます。モジュールを作成・追加を行うには 「モジュールの作成方法」 を参照してください。
その他、モジュールに関する情報は SACM モジュールの概念 を参照してください。


![[ティップ]](images/tip.png)
![[注記]](images/note.png)