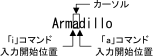
カレントディレクトリを表示する。
まず最初に、カレントディレクトリを調べてみます。
カレントディレクトリはpwdコマンドを使用して調べることができます。
以下のコマンドを実行して、カレントディレクトリを表示させてください。
[armadillo ~]# pwd
/root
pwdコマンドを実行すると/rootという結果が表示されました。
これでカレントディレクトリは/rootディレクトリであることが確認できます。
ディレクトリを移動し、カレントディレクトリが変わっている事を確認する。
次に/homeディレクトリに移動してみます。
ディレクトリの移動に使用するコマンドはcdコマンドです。
cdコマンドの引数として/homeディレクトリを絶対パスで指定してください。
以下のコマンドを実行して、ディレクトリを移動してください。
[armadillo ~]# cd /home
[armadillo /home]# pwd
/home
これでカレントディレクトリが/homeディレクトリに変わりました。
ホームディレクトリに移動する。
次はホームディレクトリに戻ってみます。
先ほどはcdコマンドに移動したいディレクトリを引数として使用しましたが、ホームディレクトリに移動する場合、引数は必要ありません。
以下のコマンドを実行して、ホームディレクトリに移動してください。
[armadillo /home]# cd
[armadillo ~]# pwd
/root
カレントディレクトリが/rootディレクトリに戻りました。
空のディレクトリを作成する。
次は、ディレクトリの操作について説明します。
まずはディレクトリを作成してみます。
ディレクトリを作成するコマンドはmkdirコマンドです。
以下のコマンドを実行して、ディレクトリの作成をしてください。
[armadillo ~]# mkdir dir
mkdirコマンドでdirディレクトリを作成しました。
ディレクトリを作成したことを確認するにはlsコマンドを使用します。
lsコマンドは引数に指定したディレクトリにあるファイルを表示します。
引数に何も指定しなかった場合は、カレントディレクトリにあるファイルを表示します。
以下のコマンドを実行して、カレントディレクトリにあるファイルを表示してください。
[armadillo ~]# ls
dir/
さきほど作成したdirディレクトリが表示されます。
ディレクトリにファイルをコピーする。
ディレクトリを作成しましたので、ファイルをdirディレクトリに保存してみます。
すでにArmadillo上にあるファイルをdirディレクトリにコピーします。
ファイルをコピーするコマンドはcpコマンドです。
以下のコマンドを実行し、ホスト名を設定するファイル(/etc/hostname)をdirディレクトリにコピーしてください。
[]
[armadillo ~]# cp /etc/hostname dir
dirディレクトリにhostnameファイルをコピーしました。
![[ティップ]](images/tip.png) | シェルの補完機能 |
|---|
長いファイル名を間違えずに入力するのは、大変です。
そのため、シェルにはコマンドやパスを補完してくれる機能があります。 例えば、以下のように「cp /e」まで入力したあと、Tabキーを入力すると「cp /etc/」まで補完してくれます。 [armadillo ~]# cp /eTab
[armadillo ~]# cp /etc/ 候補が複数ある場合は、2回タブを入力することで、候補を列挙してくれます。
例えば、以下のように「cp /etc/」まで入力したあと、Tabキーを2回入力すると、「/etc」以下のディレクトリがすべて表示されます。
この時、表示されるファイル数が多い場合は「Display all 141 possibilities? (y or n)」と画面に表示され、yキーを押すと1ページずつ表示することができます。
表示するファイルが残っている場合は「--More--」と表示され、スペースキーを押すたびに1ページ分を追加で表示し、qキーを押すと途中で表示をやめることができます。 [armadillo ~]# cp /etc/TabTab
Display all 141 possibilities? (y or n)
.pwd.lock manpath.config
X11/ mime.types
adduser.conf mke2fs.conf
aliases modules-load.d/
alternatives/ motd
apt/ mtab
bash.bashrc mysql/
bash_completion network/
bash_completion.d/ networks
bindresvport.blacklist nsswitch.conf
binfmt.d/ opt/
ca-certificates/ os-release
ca-certificates.conf pam.conf
calendar/ pam.d/
cron.d/ passwd
cron.daily/ passwd-
cron.hourly/ perl/
cron.monthly/ ppp/
cron.weekly/ profile
crontab profile.d/
dbus-1/ protocols
debconf.conf python2.7/
debian_version rc.local
--More-- 補完は、コマンドにも有効です。
以下のように「c」と入力したあと、Tabキーを2回連続で入力すると、「c」から始まる実行可能なコマンドをすべて表示してくれます。 [armadillo ~]# cTabTab
c2ph clear_console
c_rehash cmp
cal col
calendar colcrt
caller colrm
capsh column
captoinfo comm
case command
cat compgen
catchsegv complete
catman compopt
cd compose
cfdisk continue
chage coproc
chattr corelist
chcon cp
chcpu cpan
chfn cpan5.24-arm-linux-gnueabihf
chgpasswd cpgr
chgrp cppw
chmod cron
chown crontab
chpasswd cryptdir
--More-- |
ディレクトリの内容を表示する。
実際にコピーされているかをlsコマンドを使って確認してみます。
lsコマンドは引数に
dirを指定することで、dirディレクトリにあるファイルを表示することができます。
以下のコマンドを実行し、dirディレクトリにhostnameファイルがあることを確認してください。
[armadillo ~]# ls dir
hostname
lsコマンドの結果から、hostnameファイルがdirディレクトリにコピーされたことがわかります。
ファイルの内容を表示する。
次に、hostnameファイルの内容を表示してみます。
ファイルの内容を表示するコマンドはcatコマンドです。
以下のコマンドを実行しdir/hostnameファイルの内容を表示してください。
[armadillo ~]# cat dir/hostname
armadillo
catコマンドの結果としてarmadilloと表示されます。
armadilloというのはhostnameファイルに書かれている内容が表示されたものです。
ファイルの名前を変更する。
次は、ファイルの名前を変更してみます。
ファイルの名前を変更するコマンドはmvコマンドです[]。
以下のコマンドを実行し、hostnameファイルの名前をnameファイルに変更してください。
[armadillo ~]# mv dir/hostname dir/name
[armadillo ~]# ls dir
name
[armadillo ~]# cat dir/name
armadillo
lsコマンドを使用してdirディレクトリのファイルを見ると、hostnameファイルがなくなって、代わりにnameファイルができています。
catコマンドでnameファイルの中身を見てみると、確かにhostnameファイルと同じであることが確認できます。
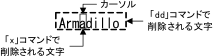
ファイルを削除する。
次は、ファイルを削除してみます。
ファイルを削除するコマンドはrmコマンドです。
以下のコマンドを実行し、dir/nameファイルを削除してください。
「rm : remove 「dir/name」?」と削除してもよいかの確認がでますので、yキーを押してから、Enterキーを押してください。
[armadillo ~]# rm dir/name
rm: remove `dir/name'? y
[armadillo ~]# ls dir
lsコマンドを使用してdirディレクトリのファイルを見ると、nameファイルが削除されていることがわかります。
ディレクトリを削除する。
次に、ディレクトリを削除してみます。
ディレクトリの削除をするコマンドはrmdirコマンドです。
以下のコマンドを実行し、dirディレクトリを削除してください。
[armadillo ~]# rmdir dir
[armadillo ~]# ls
lsコマンドを実行しても何も表示されません。
これでdirディレクトリが削除されたことがわかります。
rmdirコマンドは引数に指定したディレクトリが空でない場合はエラーが発生し、ディレクトリを削除することができません。
空でないディレクトリを削除する場合は、rmコマンドに-rオプションを付けて実行することで削除できます。


![[警告]](images/warning.png)



![[注記]](images/note.png)
 Password: root
Password: root 

 hello world!
hello world!