Armadillo-610は拡張インターフェース(Armadillo-610: CON2)から拡張します。
電源、リセット、複数の機能をもったi.MX6ULLの信号線等、
Armadillo-610を拡張するために必要な信号線はすべて、
CON2の100ピンコネクタに接続されています。
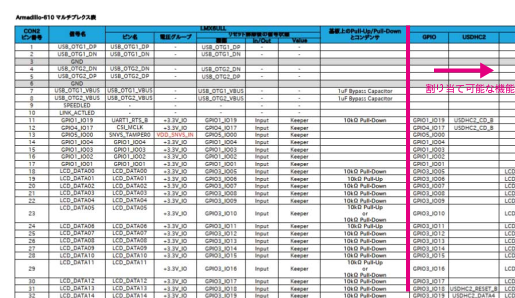
Armadillo-610では、表2.3「仕様」の拡張インターフェースの欄にあるとおりの機能が拡張できます。ただし、ここに記載の拡張数は、優先的に機能を割り当てた場合の最大数ですので、必要な機能がすべて実現できるかは、『Armadillo-610 マルチプレクス表』で検討する必要があります。
マルチプレクス表では、CON2の各ピンに割り当て可能な機能の他に、リセット後の信号状態、プルアップ/ダウン抵抗の有無等の情報を確認することができます。
本書には各機能の概要しか記載していませんので、詳細な仕様が必要な場合は、NXP Semiconductorsのホームページからダウンロード可能な、『i.MX 6ULL Applications Processor Reference Manual』、『i.MX 6ULL Applications Processors for Industrial Products』をご確認ください。Armadillo-610固有の情報を除いて、回路設計に必要な情報はこれらのマニュアルに、すべて記載されています。
検索しやすいように、マルチプレクス表や「CON2(拡張インターフェース)の概要」にi.MX6ULLのピン名やコントローラー名を記載しておりますので、是非ご活用ください。
Armadillo-610の拡張ボードを設計開発するためのリファレンス回路を公開しています。
Armadillo-610 リファレンス回路では、以下の機能の拡張方法を確認することができます。
また、一部の回路の動作はArmadillo-610 拡張ボードで確認することができます。
-
電源
-
起動デバイス設定
-
LAN(Ethernet)、無線LAN
-
USB HUB、USB Host、USB OTG
-
SD
-
LCD []
-
RS485、UART(デバッグ用)
-
MQS、SAI []
-
絶縁デジタル入出力
-
リアルタイムクロック
-
スイッチ、LED
-
A/D、I2C
![[警告]](images/warning.png) | |
|---|
Armadillo-610 リファレンス回路図、部品表に記載している部品につきまして、
既に販売終了していたり、終息部品になっている場合があります。
部品採用を決定する前に、部品の現在のステートについて、十分にご確認ください。 |
Armadillo-610の電源電圧は3.6~4.5Vです。
拡張ボード側にUSB Hostを搭載するのであれば、USBデバイスに供給するための5Vが必要となりますので、
拡張ボード側の主電源を5VにしてUSBへの供給電源とし、
5Vを3.6~4.5Vの電圧に降圧して、Armadillo-610に供給するのがおすすめです。
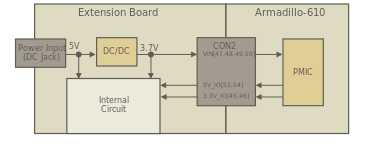
Armadillo-610 リファレンス回路で、5Vを3.7Vに降圧して
Armadillo-610に供給する回路を確認することができます。
抵抗値で出力電圧を変更できるタイプのDC/DCコンバータを採用しておりますので、別の電圧値が必要な場合は、抵抗値を変更することで対応可能です。
電源は拡張インターフェース(Armadillo-610: CON2)のVINピンから供給します。CON2に搭載している100ピンのコネクタは、1ピンあたり流せる電流値が最大0.3Aです。
VINピンは全部で4本ありますので、CON2から供給できる電流値は最大1.2Aとなります。
CON2から、5V電源(+5V_IO)、3.3V電源(+3.3V_IO)が拡張ボード用に出力されています。+5V_IOは最大600mA、+3.3V_IOは最大500mAまで供給可能ですが、
Armadillo-610への最大供給電流が1.2Aであるため、必ずしも最大まで出力することはできません。
各最大電流値を超えないように外部機器の接続、供給電源の設計を行ってください。
全体の消費電力が少ないのであれば、Armadillo-610へは3.6~4.5V電源を直接供給し、5V電源、3.3V電源をArmadillo-610からの出力で賄うという構成も可能です。
Armadillo-610の電源投入時、+5V_IOはArmadillo-610の電源(VIN)とほぼ同時に立ち上がり、
一定時間VINと同電位を維持した後、ソフトウェアから有効にされたタイミングで5Vまで立ち上がります。
+5V_IOは、VINを昇圧して5V電源を生成しているため、+5V_IOからの出力電圧をVIN以下にすることはできません。
+5V_IOの出力無効時はVINと同電位の電圧が出力され、+5V_IOの出力有効時は+5Vが出力されます。
+5V_IOの出力を0Vにしたい場合は、電源制御のためのパワースイッチの搭載をおすすめします。
「電気的仕様」でArmadillo-610の電気的仕様について説明しておりますので、詳細についてはこちらでご確認ください。
Armadillo-610は下記2つのデバイスから起動が可能です。
-
オンボードeMMC
-
microSDカード(Armadillo-610: CON1)
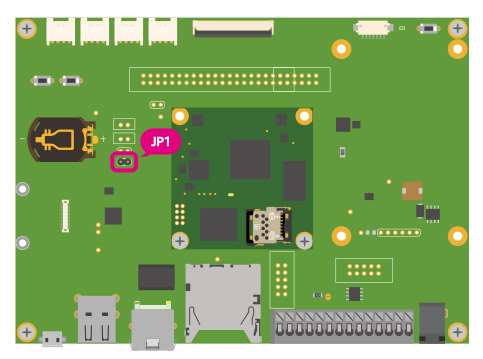
どちらのデバイスから起動するかは、eFUSEもしくは拡張インターフェース(Armadillo-610: CON2)のBJP1ピンで設定します。eFUSEで設定する方法については、「eFuse を変更する」をご確認ください。
BJP1ピンの状態は、Armadillo-610の電源(VIN)投入時に読み出され、起動デバイスが選択されます。
表3.5 BJP1の状態と起動デバイス
| BJP1 | 起動デバイス |
|---|
Low | eMMC |
High | microSDカード |
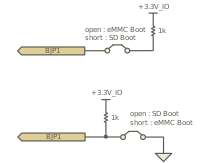
BJP1ピンはArmadillo-610上で47kΩでプルダウンされているため、
eMMCから起動したい場合はBJP1ピンをオープン、microSDカードから起動したい場合は、
BJP1ピンを+3.3V_IOにプルアップ(抵抗値は1kΩ程度)してください。
![[注記]](images/note.png) | |
|---|
起動デバイスをmicroSDカードに設定した場合でも、
microSDスロットにmicroSDカードが挿さっていなかった場合は、
eMMCから起動します。 [] |
| |
|---|
出荷時、i.MX6ULLの起動デバイスに関するeFUSEは未設定です。 |
| |
|---|
eFUSEを設定した場合、BJP1の設定は無視されます。 |
| |
|---|
eFUSEは一度書き込むと元に戻すことができません。
eFUSEの設定によってはArmadillo-610が正常に動作しなくなる可能性がありますので、
書き込みを行う際には細心の注意を払うようお願いいたします。
eFUSEの設定によって異常が起こった場合は、保証対象外となります。 |
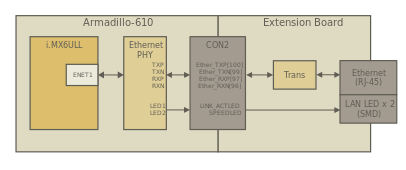
LANを拡張する場合は、拡張ボード側にトランスとLANコネクタ、LEDを搭載してください。
拡張インターフェース(Armadillo-610: CON2)にはEthernet PHYの送受信の信号線およびLANのスピードLED、
アクティビティLED用の信号線が接続されています。
回路の詳細はArmadillo-610 リファレンス回路で確認することが可能です。
また、Armadillo-610 拡張ボードで動作確認することも可能です。
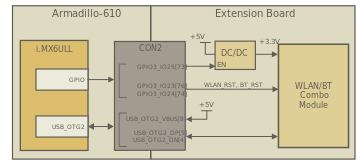
無線LAN/BTを拡張する場合、動作確認済みデバイスである、Laird Connectivity製のSterling LWB5+がおすすめです。
Sterling LWB5+の無線LAN回路はUSBもしくはSDIO、BT回路はUSBもしくはUARTで接続することができます。
無線LAN、BT共にUSB接続した場合の回路の詳細をリファレンス回路で確認することが可能です。
また、姉妹製品であるArmadillo-640とArmadillo-600シリーズWLANオプションモジュールで
無線LAN/BTの動作を確認することも可能です。
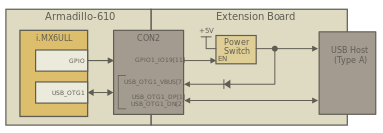
USBは2ポート拡張可能で、Hostは最大2ポート、OTGは最大1ポート拡張することが可能です。
USB Hostを拡張する場合は、USBデバイスへ供給する電源制御のためのパワースイッチを搭載してください。
パワースイッチのイネーブルピン制御のためのGPIOは電源投入時、プルアップされていないものを選定してください。
USB_OTGx_VBUSピンを使用しないデバイスを搭載する場合でも、
デバイス検出のためにUSB_OTGx_VBUSピンへ電圧を印加する必要があります。
USB_OTGx_VBUSピンへの電源がON/OFF制御される場合、
USB_OTGx_VBUSピンへの電圧印加はダイオード経由にする必要があります。
| |
|---|
USB_OTGx_VBUSピンへは最低4.4Vの電圧を印加する必要がありますので、ダイオードのVf電圧にご注意ください。
電圧が低すぎる場合、USBメモリの挿抜を検出できない等の不具合が発生します。 |
USBポートが3ポート以上必要な場合は、USBハブを接続してください。
Armadillo-610 リファレンス回路では、USBハブ、Host、OTGの回路を確認することが可能です。
リファレンス回路で採用しているUSBハブは3ポート品ですが、ピンコンパチで4ポート品もラインアップされています。
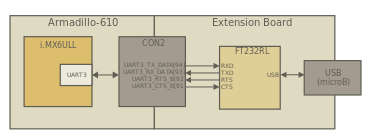
Armadillo-610のシリアル(UART)の信号レベルは+3.3V_IOですので、
必要なインターフェースの規格に合わせて、レベル変換IC等を拡張ボード側に搭載してください。
| |
|---|
i.MX6ULLのCTS、RTS信号は一般的なUARTの信号と名前が逆になっています。
誤接続にご注意ください。 |
![[ティップ]](images/tip.png) | |
|---|
デバッグやメンテナンス用途であれば、拡張ボード上にレベル変換ICを搭載せずに、
外付けのレベル変換アダプタを使用するのもおすすめです。
レベル変換アダプタは、弊社からもオプション品として購入することが可能です。 |
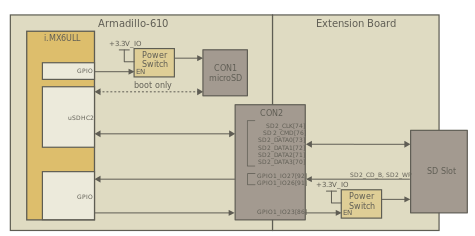
SDホストコントローラ(uSDHC2)を使用できる信号線がSDインターフェース(Armadillo-610: CON1)と
拡張インターフェース(Armadillo-610: CON2)に接続されており、
SDホストコントローラはどちらか一方でしか使用することができません。
SDスロットを基板端に配置したい場合やSDIO接続のデバイスを拡張したい場合などにご使用ください。
SDスロットを拡張する場合、SDカード検出、ライトプロテクト検出は
GPIOで行うことが可能ですので、専用ピンを割り当てる必要はありません。
BJP1ピンをHighレベルにしてArmadillo-610の電源(VIN)を投入した場合、
SDインターフェース(Armadillo-610: CON1)に接続されたmicroSDカードがブートデバイスに設定されます。
電源投入時、SDホストコントローラ(uSDHC2)はSDインターフェース(Armadillo-610: CON1)に接続されており、
microSDカードに書き込まれたイメージファイルから起動します。
起動後、マルチプレクスの設定により、SDホストコントローラ(uSDHC2)の接続先が変更になるため、拡張インターフェース(Armadillo-610: CON2)側のデバイスがブートデバイスになることはできません。
SD2_DATA3として使用可能なGPIO3_IO28ピンはブートモード設定ピンを兼用しています。
Armadillo-610の電源(VIN)投入時からU-Bootが動作するまでは、Lowレベルを保持する必要があり、47kΩのプルダウン抵抗が接続されています。
ただし、SDカード等が正常動作するには、SD2_DATA3にプルアップ抵抗が必要となるため、
Armadillo-610の電源(VIN)投入時は立ち上がらない電源でプルアップ(抵抗値は15kΩ程度)し、
起動後にプルアップ抵抗の接続された電源を立ち上げる等の対処が必要となります。
SDスロットを拡張する回路の詳細は、Armadillo-610 リファレンス回路で確認することが可能です。
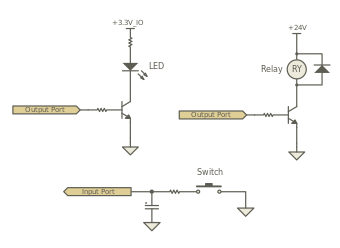
スイッチやLED、リレーを拡張する場合は、GPIOを割り当てます。
GPIOに割り当て可能なピンは多数ありますので、
プルアップ/プルダウン抵抗の有無と電圧レベルを確認して、使用するピンを決定してください。
拡張インターフェース(Armadillo-610: CON2)には、i.MX6ULLの信号線が直接接続されています。
スイッチは人の手で操作するインターフェースですので、
静電気等による内部回路の故障を防ぐため、電流制限抵抗を接続することをおすすめします。
LED、リレーはGPIOピンで直接駆動せずにトランジスタ等を経由して駆動してください。
i.MX6ULL内蔵のリアルタイムクロックのバックアップ用のピン(RTC_BAT)が
拡張インターフェース(Armadillo-610: CON2)に接続されていますので、
Armadillo-610の電源(VIN)を切断しても時刻データを保持したい場合にバッテリー等を接続してください。
i.MX6ULL内蔵のリアルタイムクロックは、一般的なリアルタイムクロックICよりも
消費電力が高いため、外付けバッテリーの消耗が速くなります。
バッテリーの消耗が製品の運用に支障をきたす場合は、
消費電力が少ないリアルタイムクロックを拡張ボード側に搭載してください。
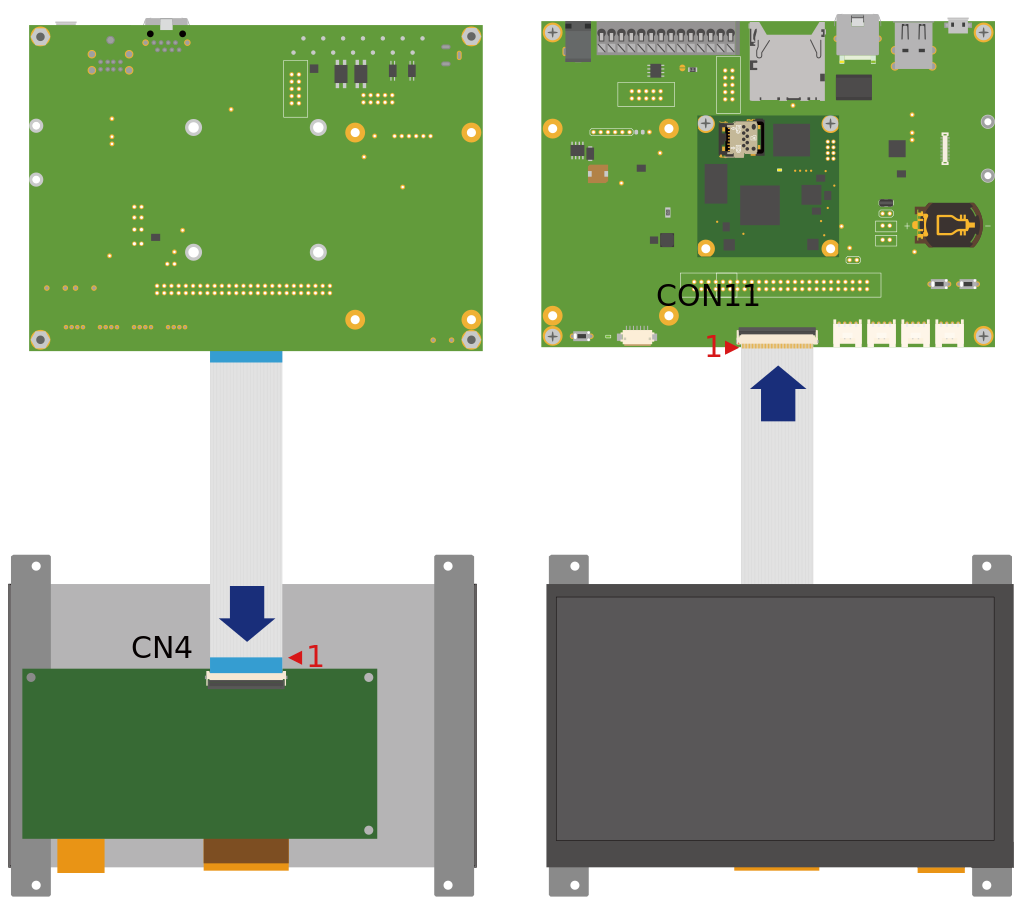
デジタルRGB入力を持つ液晶パネルモジュールなどを接続することができます。
Armadillo-610 リファレンス回路では、以下のタッチパネルLCDを接続するための回路を確認することが可能です。
-
LCDオプションセット(7インチタッチパネルWVGA液晶)(型番: OP-LCD70EXT-00)
-
Armadillo-400シリーズLCDオプションセット(4.3インチタッチパネルWQVGA液晶)(型番: OP-A400-LCD43EXT-L01)
オプションセットの詳細につきましては「LCDオプションセット(7インチタッチパネルWVGA液晶)」、「Armadillo-400シリーズLCDオプションセット」をご確認ください。
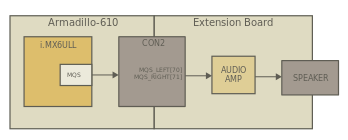
I2Sで最大2ポート、MQSで最大1ポート、S/PDIFで最大1ポートオーディオを拡張することが可能です。
MQSは拡張ボード側にオーディオアンプを搭載するだけで良いので、高品質な音が必要でない場合にはおすすめです。
SAI、S/PDIFを使用する場合は、オーディオコーデックとオーディオアンプ等を拡張ボード側に搭載してください。
MQSの回路はArmadillo-610 リファレンス回路図、I2Sの回路はArmadillo-400シリーズ LCDオプションセットのLCD拡張ボード回路図で確認することが可能です。
拡張インターフェース(Armadillo-610: CON2)のEXT_RESET_Bピン、PWRONピンによりリセットスイッチを拡張することが可能です。
押していない時はオープン、押した時はGNDとショートするスイッチを接続してください。
スイッチは人の手で操作するインターフェースですので、
静電気等による内部回路の故障を防ぐため、電流制限抵抗を接続することをおすすめします。
EXT_RESET_Bピンではシステムリセット、PWRONピンではパワーマネジメントICからの電源の供給/切断の制御が可能です。
それぞれの機能の詳細については、「リセット回路の構成」、「外部からの電源制御」をご確認ください。
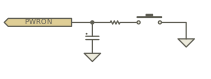
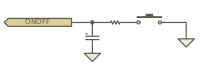
拡張インターフェース(Armadillo-610: CON2)のONOFFピンにより、長押しで電源の制御を行うスイッチを拡張することが可能です。
押していない時はオープン、押した時はGNDとショートするスイッチを接続してください。
スイッチは人の手で操作するインターフェースですので、
静電気等による内部回路の故障を防ぐため、電流制限抵抗を接続することをおすすめします。
ONOFFピンの機能の詳細については「外部からの電源制御」をご確認ください。
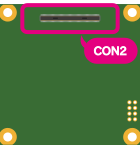
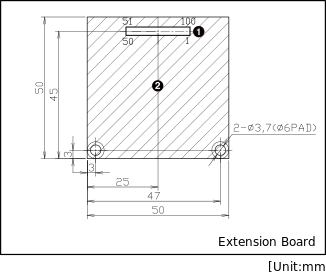
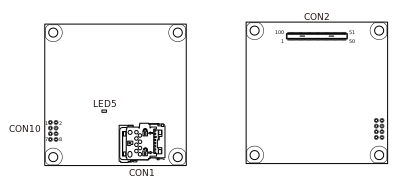
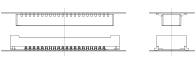
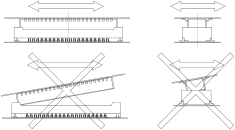
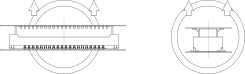
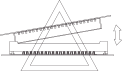
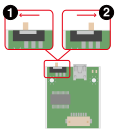
Armadillo-610の拡張ボードを設計する際の、推奨レイアウトは図3.43「拡張ボード推奨レイアウト」のとおりです。
Armadillo-610との接続コネクタは、HIROSE ELECTRIC製のDF40HC(3.0)-100DS-0.4V(51)を搭載してください。
嵌合高さは3mmとなりますので、Armadillo-610の下に部品を配置する場合、部品高さにご注意ください。
固定穴径とパッド寸法はマックエイト製のスルーホールタップ(TH-1.6-3.0-M3)を
実装する場合の推奨となります。
別の方法で固定する場合は適宜寸法を変更してください。
-

-
DF40HC(3.0)-100DS-0.4V(51)/HIROSE ELECTRIC
-

-
Armadillo-610側の最大部品高さ: 2mm
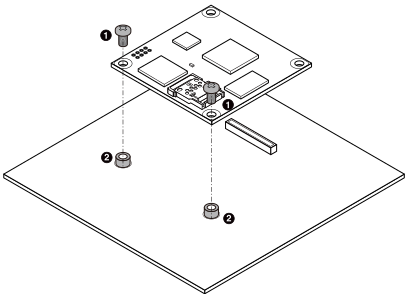
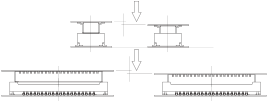
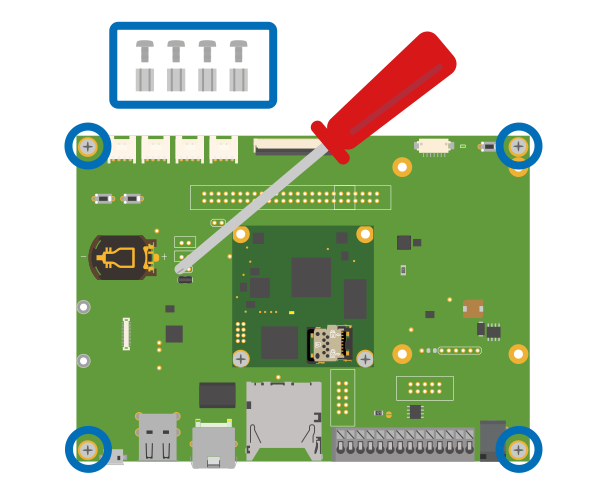
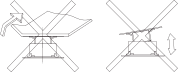
Armadillo-610の固定穴はGNDに接続されています。
GND強化のため、拡張ボード側の固定穴もGNDに接続し、金属製のスペーサーとねじで固定してください。
スペーサーの長さはコネクタの嵌合高さと同じ3mmとしてください。
Armadillo-610の固定例は図3.44「Armadillo-610の固定例」のとおりです。
-
-
なべ小ねじ(M3、L=5mm)
-
-
スルーホールタップ(TH-1.6-3.0-M3/Mac-Eight)
| |
|---|
Armadillo-610の固定穴は4箇所ありますが、
コネクタから離れた位置の2箇所のみ、スペーサーとねじで固定して各種試験を行い、
動作に異常がないことを確認しております。
試験の詳細につきましては、「アットマークテクノ Armadilloサイト」の
「Armadillo-610 信頼性試験報告書」にてご確認ください。 |
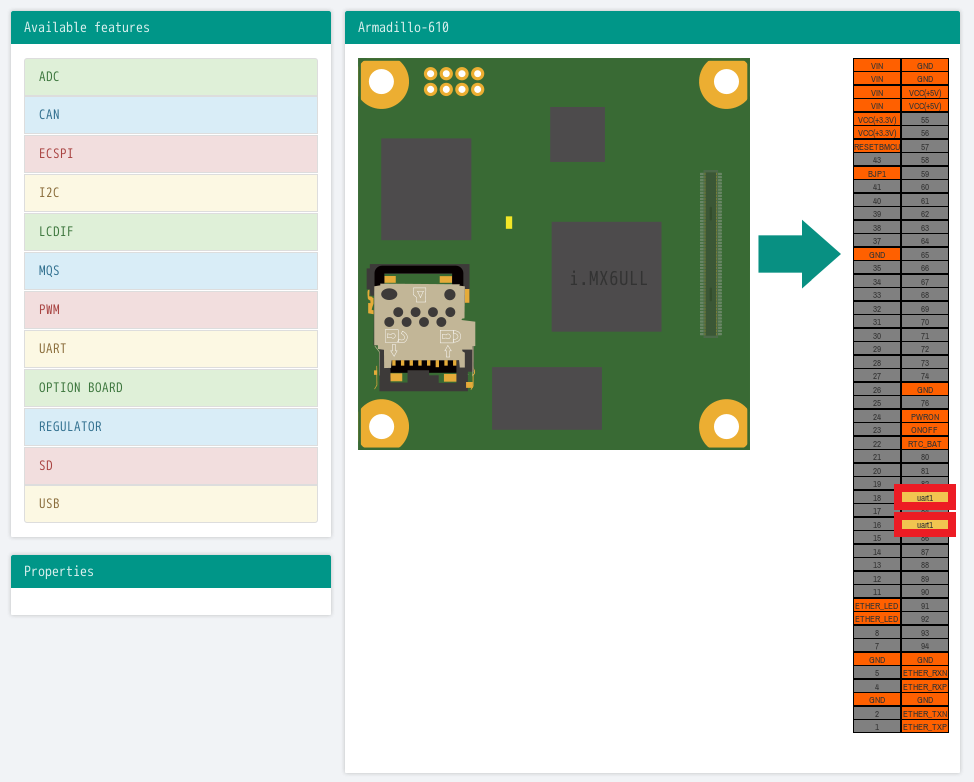
3.4.5.15. CON2(拡張インターフェース)の概要
CON2はArmadillo-610拡張用のインターフェースです。
電源、リセット、複数の機能(マルチプレクス)をもったi.MX6ULLの信号線、USB、Ethernet PHYの信号線等、Armadillo-610を拡張するために必要な信号線がすべて接続されています。
Armadillo-610の電源はVINピンから供給します。
RTC_BATピンは、i.MX6ULLの低消費電力ドメインにあるSRTC(Secure Real Time Clock)の外部バックアップインターフェースで、
長時間電源が切断されてもi.MX6ULLの一部データ(時刻データ等)を保持させたい場合にご使用ください。
| |
|---|
プルアップ/ダウン抵抗が接続されている拡張入出力ピンは、i.MX6ULLの内蔵ROMによるブートモード設定ピンを兼用しており、
ブートモード設定のため、プルアップ/ダウン抵抗で電源投入時にHigh/Lowレベルの状態を保持しています。
意図しない動作を引き起こす原因となるため、電源投入時からU-Bootが動作するまでは、
各々のピンをHigh/Lowレベルに保持した状態でご使用ください。 |
表3.6 CON2 信号配列
| ピン番号 | ピン名 | I/O | 説明 |
|---|
1 | USB_OTG1_DP | In/Out | USB_OTG1のプラス側信号、i.MX6ULLのUSB_OTG1_DPピンに接続 |
2 | USB_OTG1_DN | In/Out | USB_OTG1のマイナス側信号、i.MX6ULLのUSB_OTG1_DNピンに接続 |
3 | GND | Power | 電源(GND) |
4 | USB_OTG2_DN | In/Out | USB_OTG2のマイナス側信号、i.MX6ULLのUSB_OTG2_DNピンに接続 |
5 | USB_OTG2_DP | In/Out | USB_OTG2のプラス側信号、i.MX6ULLのUSB_OTG2_DPピンに接続 |
6 | GND | Power | 電源(GND) |
7 | USB_OTG1_VBUS | Power | 電源(USB_OTG1_VBUS)、i.MX6ULLのUSB_OTG1_VBUSピンに接続、1uFのバイパスコンデンサが接続されています。 |
8 | USB_OTG2_VBUS | Power | 電源(USB_OTG2_VBUS)、i.MX6ULLのUSB_OTG2_VBUSピンに接続、1uFのバイパスコンデンサが接続されています。 |
9 | SPEEDLED | Out | LANスピードLED用信号、Ethernet PHYのLED2ピンに接続 |
10 | LINK_ACTLED | Out | LANリンクアクティビティLED用信号、Ethernet PHYのLED1ピンに接続 |
11 | GPIO1_IO19 | In/Out | 拡張入出力、i.MX6ULLのUART1_RTS_Bピンに接続、基板上で10kΩプルダウンされています。 |
12 | GPIO4_IO17 | In/Out | 拡張入出力、i.MX6ULLのCSI_MCLKピンに接続 |
13 | GPIO5_IO00 | In/Out | 拡張入出力、i.MX6ULLのSNVS_TAMPER0ピンに接続、オープンドレインでの使用推奨 [] |
14 | GPIO1_IO04 | In/Out | 拡張入出力、i.MX6ULLのGPIO1_IO04ピンに接続 |
15 | GPIO1_IO03 | In/Out | 拡張入出力、i.MX6ULLのGPIO1_IO03ピンに接続 |
16 | GPIO1_IO02 | In/Out | 拡張入出力、i.MX6ULLのGPIO1_IO02ピンに接続 |
17 | GPIO1_IO01 | In/Out | 拡張入出力、i.MX6ULLのGPIO1_IO01ピンに接続 |
18 | LCD_DATA00 | In/Out | 拡張入出力、i.MX6ULLのLCD_DATA00ピンに接続、基板上で10kΩプルダウンされています。 |
19 | LCD_DATA01 | In/Out | 拡張入出力、i.MX6ULLのLCD_DATA01ピンに接続、基板上で10kΩプルアップ(+3.3V_IO)されています。 |
20 | LCD_DATA02 | In/Out | 拡張入出力、i.MX6ULLのLCD_DATA02ピンに接続、基板上で10kΩプルダウンされています。 |
21 | LCD_DATA03 | In/Out | 拡張入出力、i.MX6ULLのLCD_DATA03ピンに接続、基板上で10kΩプルダウンされています。 |
22 | LCD_DATA04 | In/Out | 拡張入出力、i.MX6ULLのLCD_DATA04ピンに接続、基板上で10kΩプルダウンされています。 |
23 | LCD_DATA05 | In/Out | 拡張入出力、i.MX6ULLのLCD_DATA05ピンに接続、BJP1がLowレベル時10kΩプルアップ(+3.3V_IO)、Highレベル時10kΩプルダウンされます。 |
24 | LCD_DATA06 | In/Out | 拡張入出力、i.MX6ULLのLCD_DATA06ピンに接続、基板上で10kΩプルアップ(+3.3V_IO)されています。 |
25 | LCD_DATA07 | In/Out | 拡張入出力、i.MX6ULLのLCD_DATA07ピンに接続、基板上で10kΩプルダウンされています。 |
26 | LCD_DATA08 | In/Out | 拡張入出力、i.MX6ULLのLCD_DATA08ピンに接続、基板上で10kΩプルダウンされています。 |
27 | LCD_DATA09 | In/Out | 拡張入出力、i.MX6ULLのLCD_DATA09ピンに接続、基板上で10kΩプルダウンされています。 |
28 | LCD_DATA10 | In/Out | 拡張入出力、i.MX6ULLのLCD_DATA10ピンに接続、基板上で10kΩプルダウンされています。 |
29 | LCD_DATA11 | In/Out | 拡張入出力、i.MX6ULLのLCD_DATA11ピンに接続、BJP1がLowレベル時10kΩプルダウン、Highレベル時10kΩプルアップ(+3.3V_IO)されます。 |
30 | LCD_DATA12 | In/Out | 拡張入出力、i.MX6ULLのLCD_DATA12ピンに接続、基板上で10kΩプルダウンされています。 |
31 | LCD_DATA13 | In/Out | 拡張入出力、i.MX6ULLのLCD_DATA13ピンに接続、基板上で10kΩプルダウンされています。 |
32 | LCD_DATA14 | In/Out | 拡張入出力、i.MX6ULLのLCD_DATA14ピンに接続、基板上で10kΩプルダウンされています。 |
33 | LCD_DATA15 | In/Out | 拡張入出力、i.MX6ULLのLCD_DATA15ピンに接続、基板上で10kΩプルダウンされています。 |
34 | LCD_DATA16 | In/Out | 拡張入出力、i.MX6ULLのLCD_DATA16ピンに接続、基板上で10kΩプルダウンされています。 |
35 | LCD_DATA17 | In/Out | 拡張入出力、i.MX6ULLのLCD_DATA17ピンに接続、基板上で10kΩプルダウンされています。 |
36 | GND | Power | 電源(GND) |
37 | LCD_CLK | In/Out | 拡張入出力、i.MX6ULLのLCD_CLKピンに接続 |
38 | LCD_HSYNC | In/Out | 拡張入出力、i.MX6ULLのLCD_HSYNCピンに接続 |
39 | LCD_VSYNC | In/Out | 拡張入出力、i.MX6ULLのLCD_VSYNCピンに接続 |
40 | LCD_ENABLE | In/Out | 拡張入出力、i.MX6ULLのLCD_ENABLEピンに接続 |
41 | PWM5_OUT | In/Out | 拡張入出力、i.MX6ULLのNAND_DQSピンに接続 |
42 | BJP1 | In | 起動デバイス設定用信号、ロジックICを経由してi.MX6ULLのLCD_DATA05ピン、LCD_DATA11ピンに接続、基板上で47kΩプルダウンされています。
(Low: LCD_DATA05ピンは10kΩプルアップ(+3.3V_IO)、LCD_DATA11ピンは10kΩプルダウンされます。High: LCD_DATA05ピンは10kΩプルダウン、LCD_DATA11ピンは10kΩプルアップ(+3.3V_IO)されます。) |
43 | JTAG_MOD | In | SJCモード設定ピン、i.MX6ULLのJTAG_MODピンに接続、基板上で11kΩプルダウンされています。 [] |
44 | EXT_RESET_B | In | システムリセット、i.MX6ULLのPOR_Bピンに接続、オープンドレイン入力 |
45 | +3.3V_IO | Power | 電源(+3.3V_IO) |
46 | +3.3V_IO | Power | 電源(+3.3V_IO) |
47 | VIN | Power | 電源(VIN) |
48 | VIN | Power | 電源(VIN) |
49 | VIN | Power | 電源(VIN) |
50 | VIN | Power | 電源(VIN) |
51 | GND | Power | 電源(GND) |
52 | GND | Power | 電源(GND) |
53 | +5V_IO | Power | 電源(+5V_IO) |
54 | +5V_IO | Power | 電源(+5V_IO) |
55 | GPIO4_IO19 | In/Out | 拡張入出力、i.MX6ULLのCSI_VSYNCピンに接続 |
56 | GPIO4_IO20 | In/Out | 拡張入出力、i.MX6ULLのCSI_HSYNCピンに接続 |
57 | GPIO4_IO25 | In/Out | 拡張入出力、i.MX6ULLのCSI_DATA04ピンに接続 |
58 | GPIO4_IO26 | In/Out | 拡張入出力、i.MX6ULLのCSI_DATA05ピンに接続 |
59 | GPIO4_IO27 | In/Out | 拡張入出力、i.MX6ULLのCSI_DATA06ピンに接続 |
60 | GPIO4_IO28 | In/Out | 拡張入出力、i.MX6ULLのCSI_DATA07ピンに接続 |
61 | GPIO4_IO23 | In/Out | 拡張入出力、i.MX6ULLのCSI_DATA02ピンに接続 |
62 | GPIO4_IO22 | In/Out | 拡張入出力、i.MX6ULLのCSI_DATA01ピンに接続 |
63 | GPIO4_IO24 | In/Out | 拡張入出力、i.MX6ULLのCSI_DATA03ピンに接続 |
64 | GPIO4_IO21 | In/Out | 拡張入出力、i.MX6ULLのCSI_DATA00ピンに接続 |
65 | GPIO4_IO18 | In/Out | 拡張入出力、i.MX6ULLのCSI_PIXCLKピンに接続 |
66 | GPIO4_IO09 | In/Out | 拡張入出力、i.MX6ULLのNAND_DATA07ピンに接続 |
67 | GPIO4_IO08 | In/Out | 拡張入出力、i.MX6ULLのNAND_DATA06ピンに接続 |
68 | GPIO4_IO07 | In/Out | 拡張入出力、i.MX6ULLのNAND_DATA05ピンに接続 |
69 | GPIO4_IO06 | In/Out | 拡張入出力、i.MX6ULLのNAND_DATA04ピンに接続 |
70 | GPIO3_IO28 | In/Out | 拡張入出力、i.MX6ULLのLCD_DATA23ピンに接続、基板上で47kΩプルダウンされています。 |
71 | GPIO3_IO27 | In/Out | 拡張入出力、i.MX6ULLのLCD_DATA22ピンに接続 |
72 | GPIO3_IO26 | In/Out | 拡張入出力、i.MX6ULLのLCD_DATA21ピンに接続 |
73 | GPIO3_IO25 | In/Out | 拡張入出力、i.MX6ULLのLCD_DATA20ピンに接続 |
74 | GPIO3_IO24 | In/Out | 拡張入出力、i.MX6ULLのLCD_DATA19ピンに接続 |
75 | GND | Power | 電源(GND) |
76 | GPIO3_IO23 | In/Out | 拡張入出力、i.MX6ULLのLCD_DATA18ピンに接続 |
77 | PWRON | In | パワーマネジメントICのPWRON信号、オープンドレイン入力、パワーマネジメントICのPWRONピンとi.MX6ULLのPMIC_ON_REQピンに接続、i.MX6ULL内部で100kΩプルアップ(VDD_SNVS_IN)されています。 |
78 | ONOFF | In | i.MX6ULLのON/OFF信号、オープンドレイン入力、i.MX6ULLのONOFFピンに接続、i.MX6ULL内部で100kΩプルアップ(VDD_SNVS_IN)されています。 |
79 | RTC_BAT | Power | 電源(RTC_BAT)、パワーマネジメントICのLICELLピンに接続 |
80 | GPIO1_IO08 | In/Out | 拡張入出力、i.MX6ULLのGPIO1_IO08ピンに接続 |
81 | GPIO1_IO05 | In/Out | 拡張入出力、i.MX6ULLのGPIO1_IO05ピンに接続 |
82 | GPIO1_IO30 | In/Out | 拡張入出力、i.MX6ULLのUART5_TX_DATAピンに接続 |
83 | GPIO1_IO16 | In/Out | 拡張入出力、i.MX6ULLのUART1_TX_DATAピンに接続 |
84 | GPIO1_IO31 | In/Out | 拡張入出力、i.MX6ULLのUART5_RX_DATAピンに接続 |
85 | GPIO1_IO17 | In/Out | 拡張入出力、i.MX6ULLのUART1_RX_DATAピンに接続 |
86 | GPIO1_IO23 | In/Out | 拡張入出力、i.MX6ULLのUART2_RTS_Bピンに接続 |
87 | GPIO1_IO22 | In/Out | 拡張入出力、i.MX6ULLのUART2_CTS_Bピンに接続 |
88 | GPIO1_IO21 | In/Out | 拡張入出力、i.MX6ULLのUART2_RX_DATAピンに接続 |
89 | GPIO1_IO20 | In/Out | 拡張入出力、i.MX6ULLのUART2_TX_DATAピンに接続 |
90 | GPIO1_IO00 | In/Out | 拡張入出力、i.MX6ULLのGPIO1_IO00ピンに接続 |
91 | GPIO1_IO26 | In/Out | 拡張入出力、i.MX6ULLのUART3_CTS_Bピンに接続 |
92 | GPIO1_IO27 | In/Out | 拡張入出力、i.MX6ULLのUART3_RTS_Bピンに接続 |
93 | GPIO1_IO25 | In/Out | 拡張入出力、i.MX6ULLのUART3_RX_DATAピンに接続 |
94 | GPIO1_IO24 | In/Out | 拡張入出力、i.MX6ULLのUART3_TX_DATAピンに接続 |
95 | GND | Power | 電源(GND) |
96 | Ethrer_RXN | In/Out | Ethernet 送信/受信データ(+) CH1、Ethernet PHY(LAN8720AI)のRXNピンに接続 |
97 | Ethrer_RXP | In/Out | Ethernet 送信/受信データ(-) CH1、Ethernet PHY(LAN8720AI)のRXPピンに接続 |
98 | GND | Power | 電源(GND) |
99 | Ethrer_TXN | In/Out | Ethernet 送信/受信データ(-) CH2、Ethernet PHY(LAN8720AI)のTXNピンに接続 |
100 | Ethrer_TXP | In/Out | Ethernet 送信/受信データ(+) CH2、Ethernet PHY(LAN8720AI)のTXPピンに接続 |
以降では、CON2から拡張可能な機能の概要について説明します。
| |
|---|
拡張入出力となっている信号線のほとんどが、複数の機能をもっています。
拡張できる機能の詳細につきましては、
「アットマークテクノ Armadilloサイト」からダウンロードできる
『Armadillo-610 マルチプレクス表』をご参照ください。 |
| |
|---|
複数箇所に割り当て可能な信号(USDHC2、UART1、ESPI1、I2C2等)がありますが、
同じ信号は複数ピンで同時利用できません。 |
LANを1ポート拡張することが可能です。
信号線はEthernet PHY(LAN8720AI-CP/Microchip Technology)を経由して
i.MX6ULLのEthernetコントローラ(ENET1)に接続されています。
-
通信速度: 10BASE-T/100BASE-TX(AUTO-MDIX対応)
USBを2ポート拡張可能で、Hostは最大2ポート、OTGは最大1ポート拡張することが可能です。
信号線はi.MX6ULLのUSBコントローラ(USB_OTG1、USB_OTG2)に接続されています。
USB 2.0
-
High Speed(480Mbps)
-
Full Speed(12Mbps)
-
Low Speed(1.5Mbps)
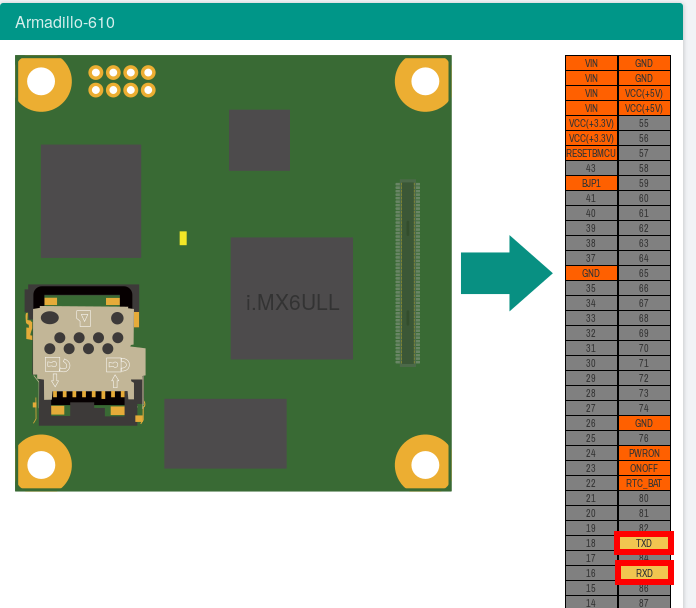
シリアル(UART)を最大8ポート拡張することが可能です。
信号線はi.MX6ULLのUART(UART1、UART2、UART3、UART4、UART5、UART6、UART7、UART8)に接続されています。
-
最大データ転送レート: 4Mbps
-
信号レベル: +3.3V_IO
CON1(SDインターフェース)と排他でSD/SDIO/MMCを1ポート拡張することが可能です。
信号線はi.MX6ULLのSDホストコントローラ(uSDHC2)に接続されています。
-
最大クロック周波数: 49.5MHz
-
信号レベル: +3.3V_IO
LCDを最大1ポート拡張することが可能です。
信号線はi.MX6ULLのLCDインターフェース(eLCDIF)に接続されています。
-
最大解像度: WXGA(1366 x 768/24bpp)
-
信号レベル: +3.3V_IO
I2Sを最大2ポート拡張することが可能です。
信号線はi.MX6ULLの同期式オーディオインターフェース(SAI1、SAI3)に接続されています。
MQSを最大1ポート拡張することが可能です。
信号線はi.MX6ULLのMedium Quality Sound(MQS)に接続されています。
S/PDIFを最大1ポート拡張することが可能です。
信号線はi.MX6ULLのSony/Philips デジタルインターフェース(SPDIF)に接続されています。
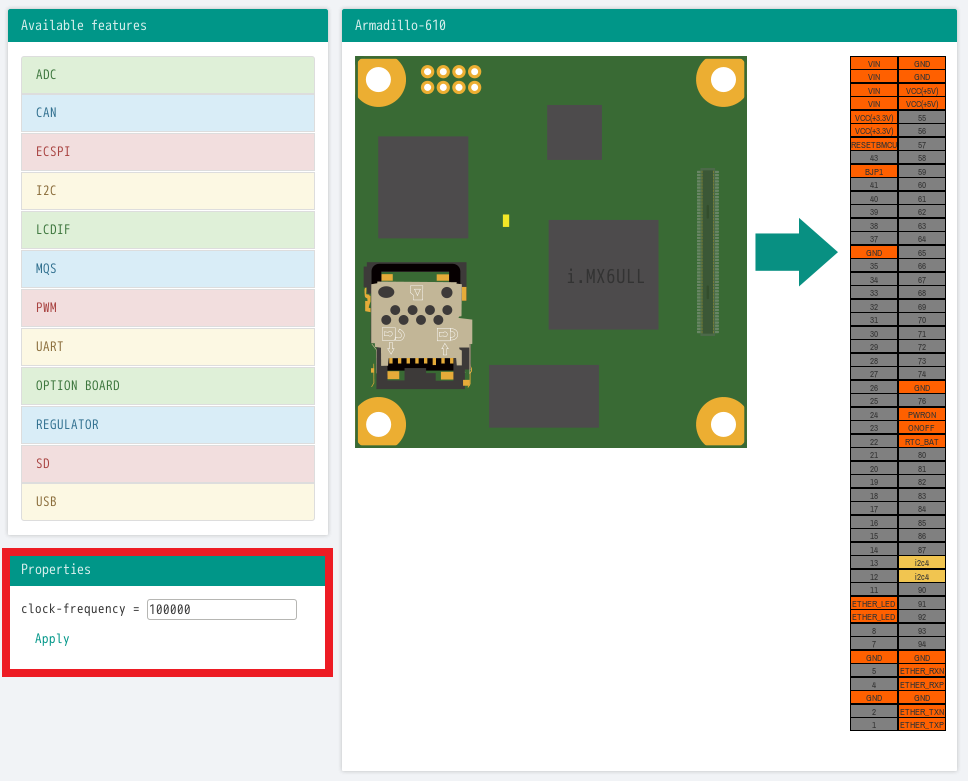
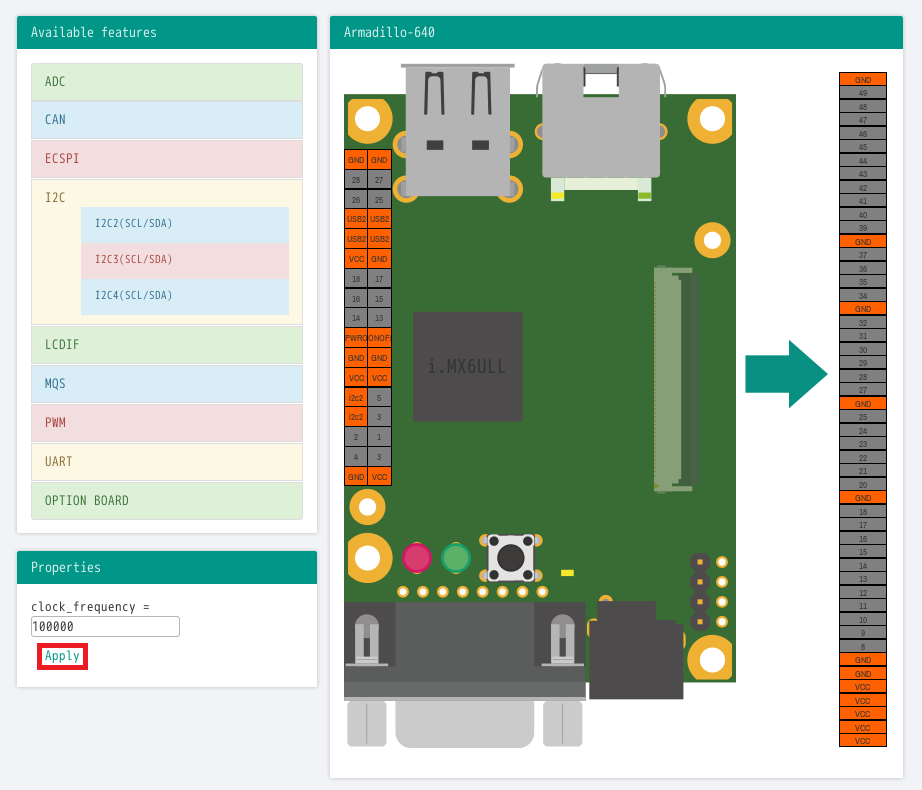
I2Cを最大2ポート拡張することが可能です。
信号線はi.MX6ULLのI2Cコントローラ(I2C2、I2C4)に接続されています。
-
最大データ転送レート: 400kbps
-
信号レベル: +3.3V_IO
SPIを最大4ポート拡張することが可能です。
信号線はi.MX6ULLのESPI(ECSPI1、ECSPI2、ECSPI3、ECSPI4)に接続されています。
CANを最大2ポート拡張することが可能です。
信号線はi.MX6ULLのFLEXCAN(FLEXCAN1、FLEXCAN2)に接続されています。
-
プロトコルバージョン2.0Bアクティブ対応
-
信号レベル: +3.3V_IO
A/Dを最大8ポート拡張することが可能です。
信号線はi.MX6ULLのADコンバーター(ADC1、ADC2)に接続されています。
-
分解能: 最大12ビット
-
サンプリングレート: 最大1MS/s
-
測定電圧範囲: DC 0〜3.3V
PWMを最大8ポート拡張することが可能です。
-
最大周波数: 66MHz
-
信号レベル: +3.3V_IO
i.MX6ULL内蔵のリアルタイムクロックを使用可能です。
バックアップ用のピン(RTC_BAT)が接続されていますので、
Armadillo-610の電源(VIN)が切断されても時刻データを保持したい場合にご使用ください。
-
平均月差: 約70秒@25℃(参考値)
-
バックアップ時間: 約4か月(CR2032使用時の参考値)


 [ATDE ~/mkswu]$ cp initial_setup.swu /media/USBDRIVE/
[ATDE ~/mkswu]$ cp initial_setup.swu /media/USBDRIVE/  [ATDE ~/mkswu]$ umount /media/USBDRIVE
[ATDE ~/mkswu]$ umount /media/USBDRIVE 
 [armadillo ~]# persist_file /etc/swupdate.watch /etc/conf.d/swupdate-url
[armadillo ~]# persist_file /etc/swupdate.watch /etc/conf.d/swupdate-url 












 atmark ユーザのパスワード(確認):
BaseOSイメージのarmadillo.atmark-techno.comサーバーからの自動アップデートを行いますか? (N/y)
atmark ユーザのパスワード(確認):
BaseOSイメージのarmadillo.atmark-techno.comサーバーからの自動アップデートを行いますか? (N/y)  abos-web のパスワードを設定してください。
パスワードを設定しない場合 abos-web は使用できなくなります。
abos-webユーザのパスワード(空の場合はアカウントをロックします):
abos-web のパスワードを設定してください。
パスワードを設定しない場合 abos-web は使用できなくなります。
abos-webユーザのパスワード(空の場合はアカウントをロックします):  abos-web ユーザのパスワード(確認):
/home/atmark/mkswu/initial_setup.swu を作成しました。
"/home/atmark/mkswu/initial_setup.swu" をそのまま使うことができますが、
モジュールを追加してイメージを再構築する場合は次のコマンドで作成してください:
mkswu "/home/atmark/mkswu/initial_setup.desc" [他の.descファイル]
インストール後は、このディレクトリを削除しないように注意してください。
鍵を失うと新たなアップデートはデバイスの /etc/swupdate.pem
を修正しないとインストールできなくなります。
* Terminal will be reused by tasks, press any key to close it.
[ATDE ~]$ ls ~/mkswu
initial_setup.desc initial_setup.swu mkswu.conf
swupdate.aes-key swupdate.key swupdate.pem
abos-web ユーザのパスワード(確認):
/home/atmark/mkswu/initial_setup.swu を作成しました。
"/home/atmark/mkswu/initial_setup.swu" をそのまま使うことができますが、
モジュールを追加してイメージを再構築する場合は次のコマンドで作成してください:
mkswu "/home/atmark/mkswu/initial_setup.desc" [他の.descファイル]
インストール後は、このディレクトリを削除しないように注意してください。
鍵を失うと新たなアップデートはデバイスの /etc/swupdate.pem
を修正しないとインストールできなくなります。
* Terminal will be reused by tasks, press any key to close it.
[ATDE ~]$ ls ~/mkswu
initial_setup.desc initial_setup.swu mkswu.conf
swupdate.aes-key swupdate.key swupdate.pem