本書ではJP1 以外は操作することはありません。JP2-JP6 は常にオープンに設定してください。JP7 は表2-1のように設定してください。JP1 については、必要に応じて切り替えの指示があります。ここでは、オープンに設定しておきます。
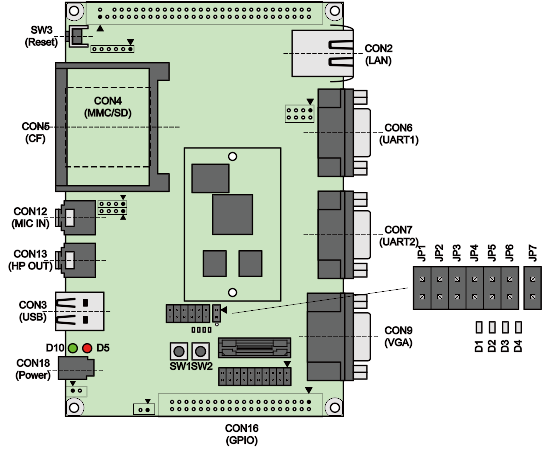
また、ジャンパピンの位置は図 2.1. 「見取り図」で確認することができます。
モジュールの型番によって、JP7 を下記のように設定してください。
あやまった設定をすると、正常に動作しないことがあります。
表 2.1. JP7の設定
| CPUモジュール型番 | JP7の状態 |
|---|
A50**-U** A50**-U**B(A50**Z-B) | ショート |
| A50**-U**C(A50**Z-C) | オープン |


![[警告]](/files/images/manual/warning.jpg)
