node-eyeコントロールパネルにアクセスするとダッシュボードが表示されます。
この画面ではnode-eyeに登録されているデバイスの接続状況の一覧、直近5件のタスクおよびイベントが表示されます。
接続中/切断中の列に表示された台数をクリックすることで、それぞれの状態にあるデバイスの一覧を表示することができます。
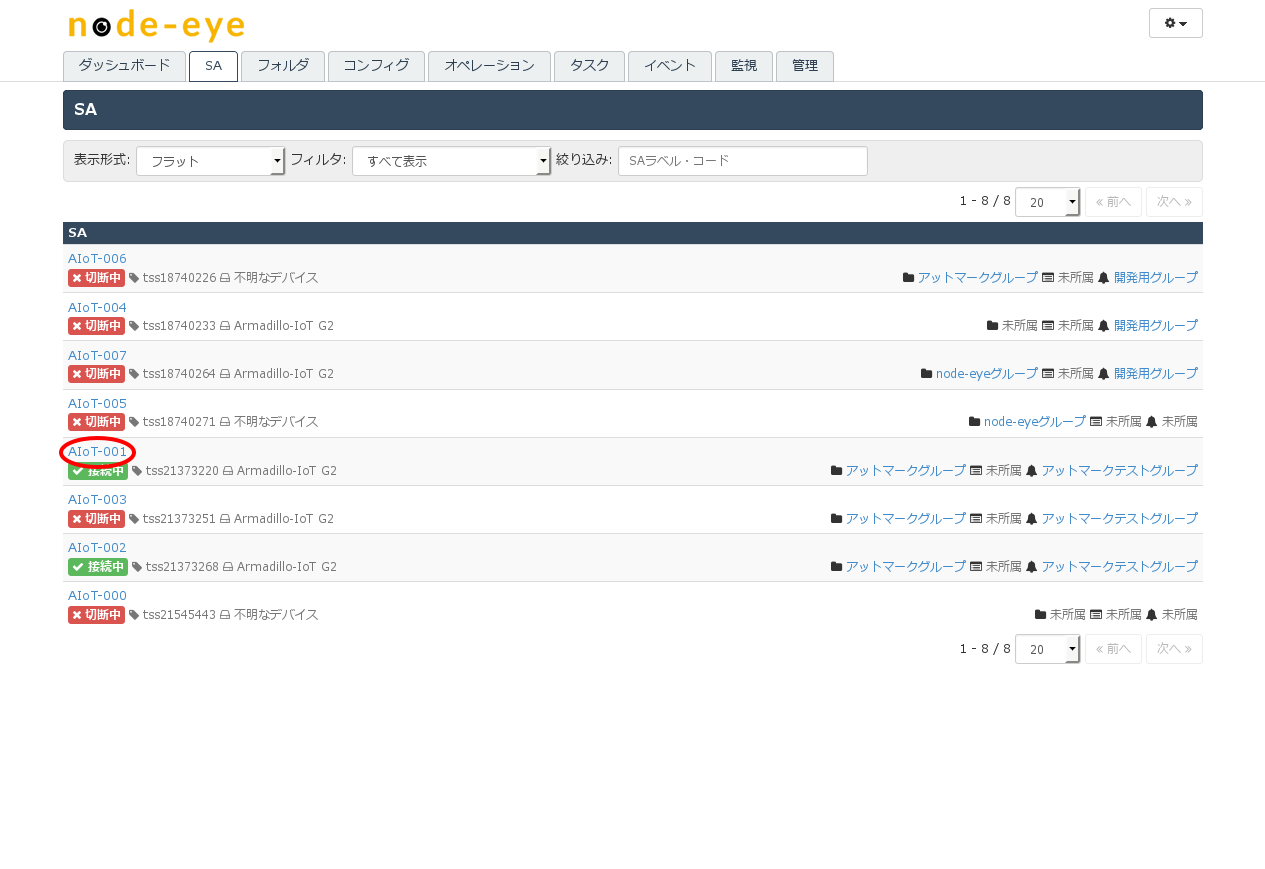
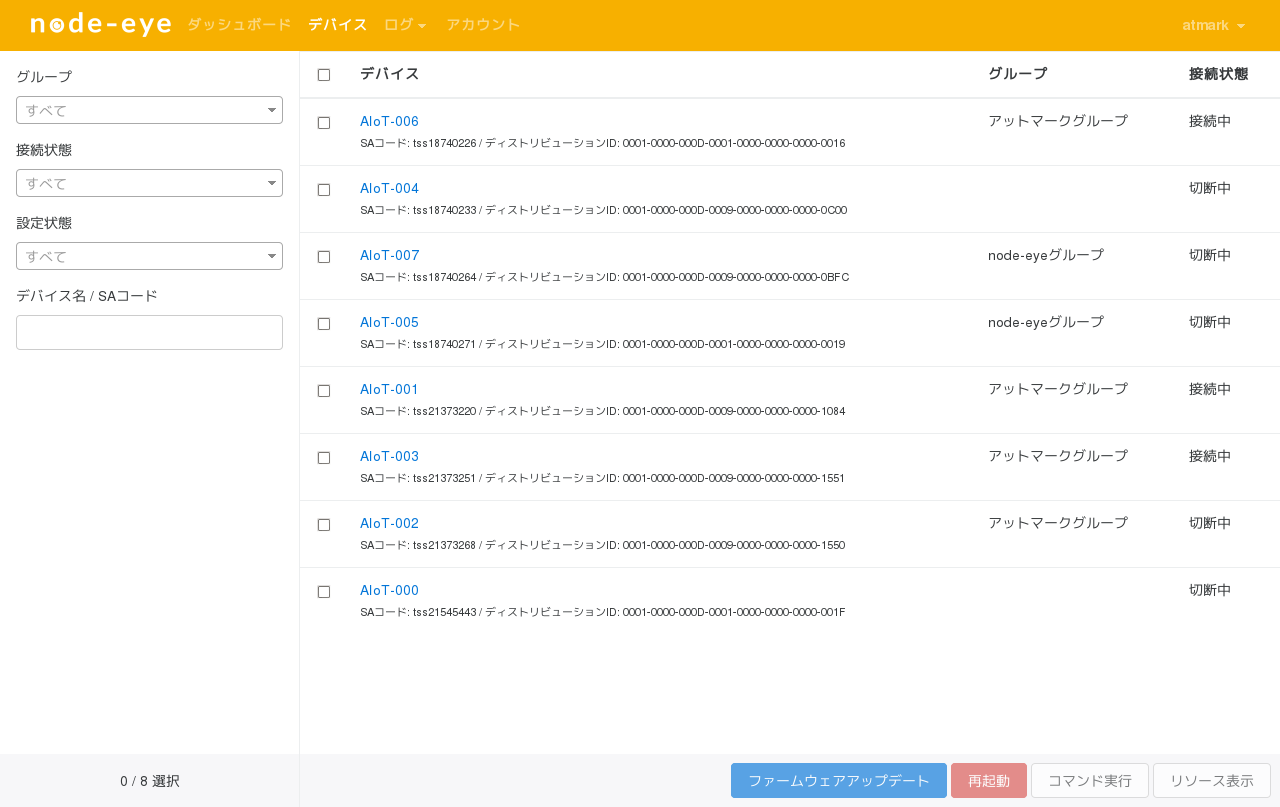
メニューから[デバイス]をクリックするとデバイスの一覧を見ることができます。
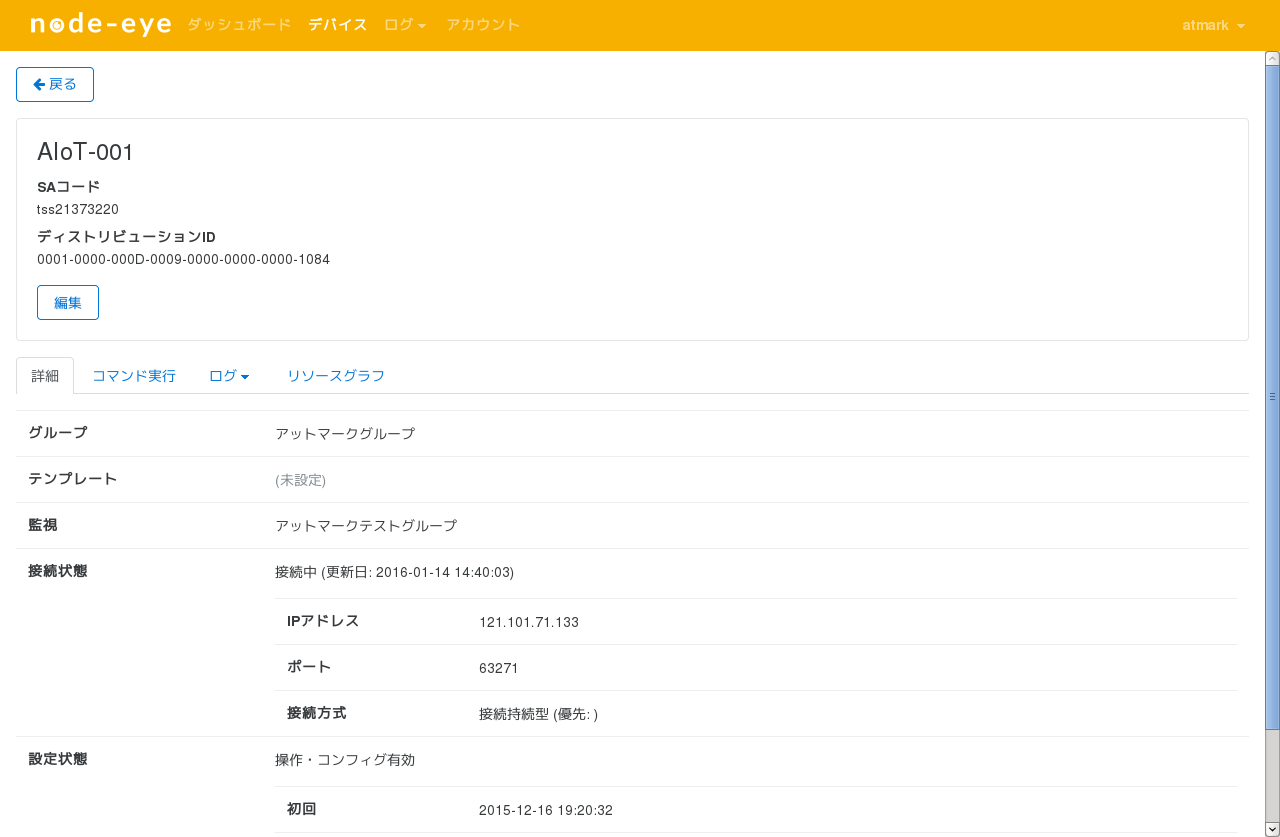
この画面では、「グループ」「接続状態」「設定状態」「デバイス名/SAコード」で目的のデバイスを絞り込み、探すことができます。目的のデバイスをクリックすることで、デバイスの詳細な情報を確認できます。
また、複数のデバイスにチェックを入れ、一括で「ファームウェアアップデート」「再起動」「コマンド実行」「リソース表示」を行うことも可能です。
![[ティップ]](images/tip.png) | |
|---|
ファームウェアアップデート実行中でも「再起動」を行うことができます。ただし、これを行うとプライマリイメージが起動しなくなることがあります。
|
メニューから[デバイス]を選択します
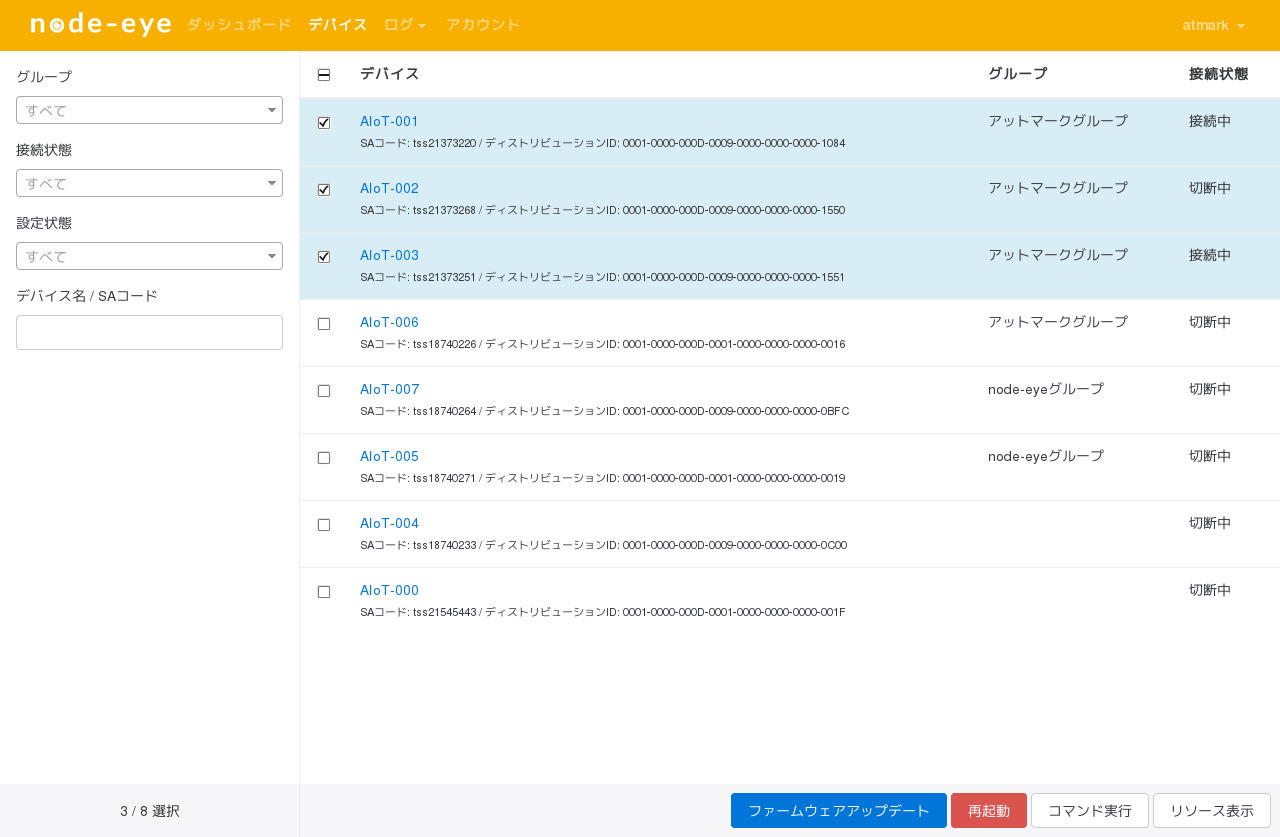
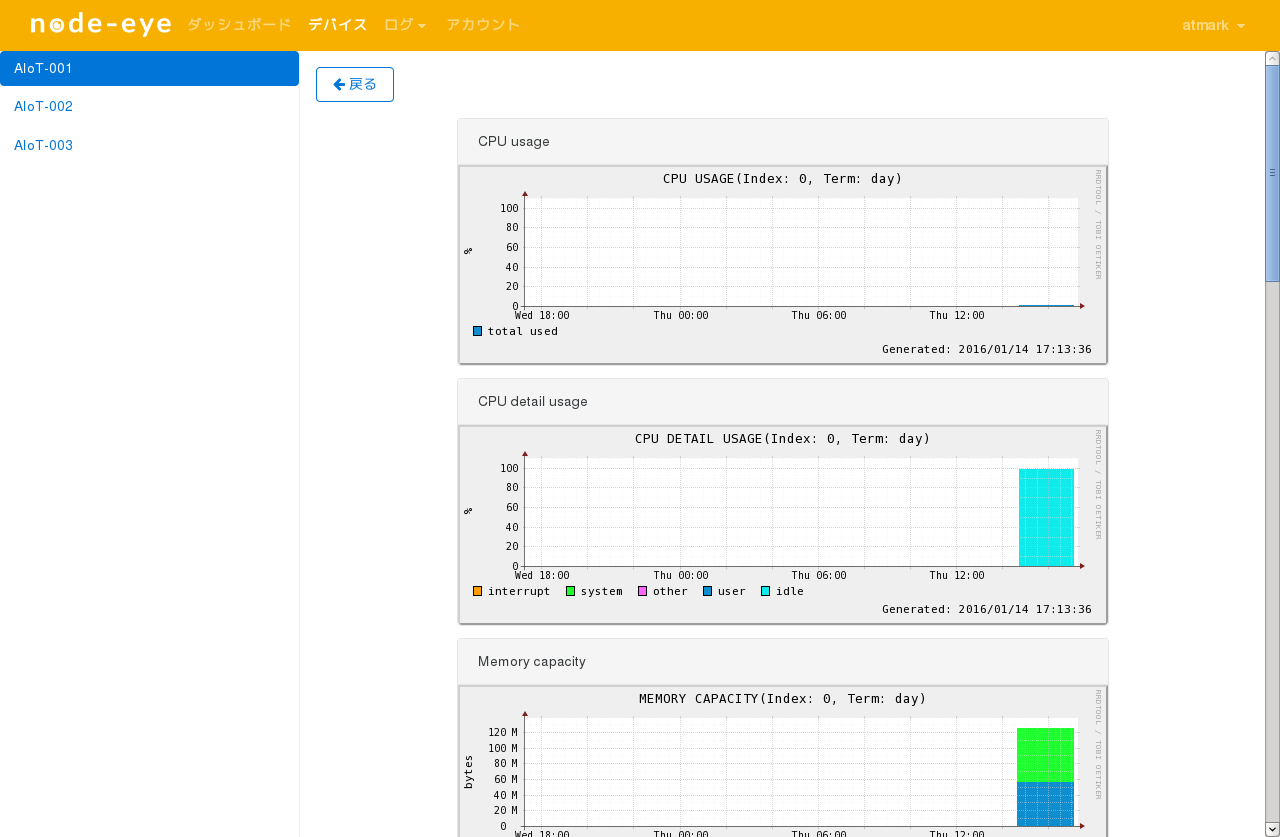
リソースを確認したいデバイスのチェックボックスを選択します。
画面下の[リソース表示]をクリックすると、CPU使用率,転送量等のデバイスのリソースが表示されます。
本章では、node-eye コントロールパネルを使ってArmadilloのファームウェアアップデートを実行する方法を説明します。
ファームウェアアップデートで書き込むファイルは、ArmadilloがアクセスすることのできるWebサーバーに公開されている必要があります。
ここではWebサーバーをATDEとして、標準LinuxカーネルイメージとDTB,ユーザーランドにアップデートを行います。
はじめにWebサーバー側の準備を行います。ATDEに必要なファイルを用意し、Linuxカーネル,ユーザーランドのファイル名変更とZIP圧縮を行ってください。
導入したいLinux カーネルのバージョンによって、用意するファイル名が変わります。以下を確認し、必要なファイルを用意してください。
表3.5 ファームウェアアップデートのためにダウンロードするファイル一覧(Linux 3.14)
| リージョン | ファイル名 |
|---|
| Linux 3.14 カーネル | uImage-x1-vXX.00 |
| Linux 3.14 Device Tree Blob | armadillo_iotg_g3-vXX.00.dtb |
| Linux 3.14 ユーザーランド | debian-jessie-armhf_aiotg3_YYYYMMDD.tar.gz |
表3.6 ファームウェアアップデートのためにダウンロードするファイル一覧(linux4.9)
| リージョン | ファイル名 |
|---|
| Linux 4.9 カーネル | uImage-x1-v4.9-atX |
| Linux 4.9 Device Tree Blob | armadillo_iotg_g3-v4.9-atX.dtb |
| Linux 4.9 ユーザーランド | debian-stretch-armhf_aiotg3_YYYYMMDD.tar.gz |
次に、用意したファイルを Armadillo がダウンロードできるように /var/www/html/ にコピーします。
次に、ブラウザでnode-eyeコントロールパネルを開き、メニューから[デバイス]を選択します
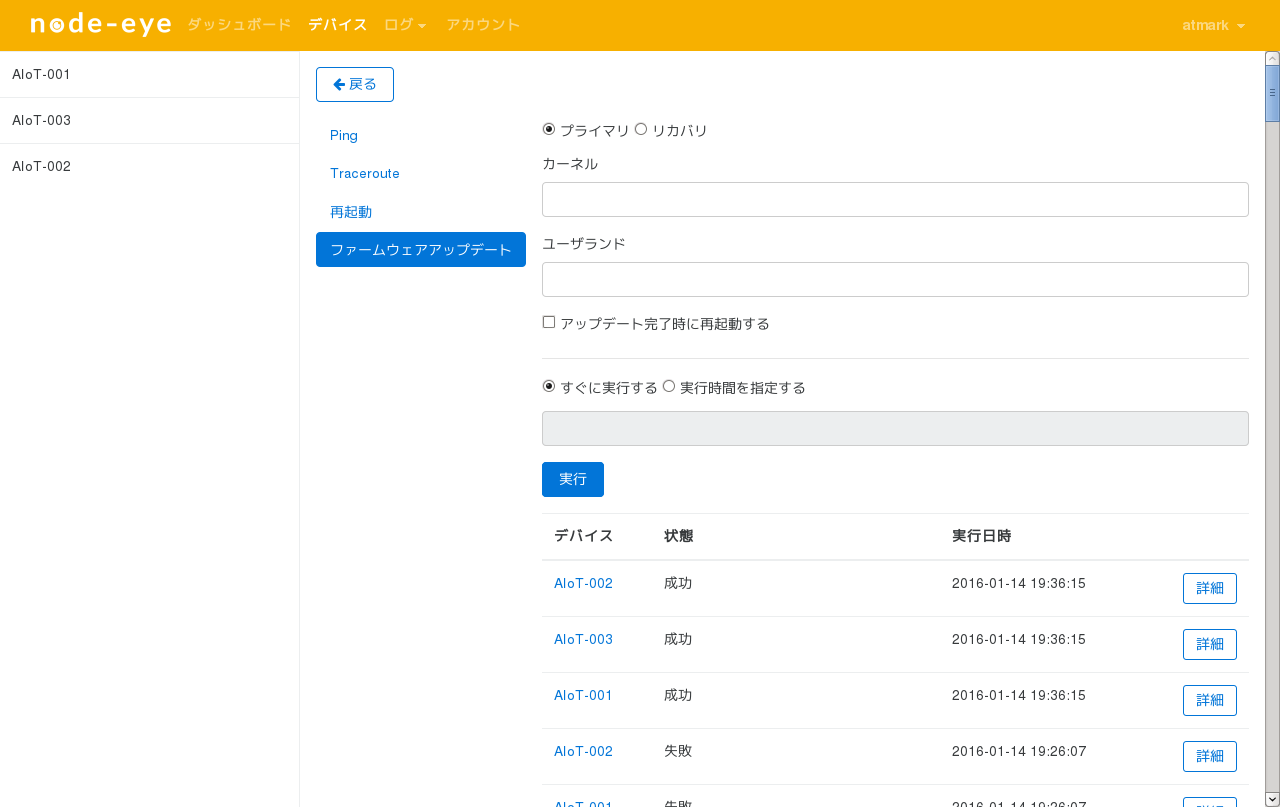
デバイスの中から[接続状態]が 接続中 になっているデバイスのチェックボックスを選択し、画面下の[ファームウェアアップデート]をクリックします。
下記のようにフォームへ入力してください([ATDEのIPアドレス]はご利用の環境にあわせて変更してください)。
表3.7 ファームウェアアップデート
| フォーム | 入力内容 |
|---|
| プライマリ/リカバリ | プライマリ |
| カーネル | http://[ATDEのIPアドレス]/uImage |
| ユーザーランド | http://[ATDEのIPアドレス]/debian-armhf.tar.gz |
| アップデート完了時に再起動する | ✔ |
「アップデート完了時に再起動する」 にチェックを入れて [実行]をクリックしファームウェアアップデートを開始します。[]
| |
|---|
ファームウェアアップデートは[カーネル][ユーザーランド]のどちらかを入力し、もう片方を空欄にすることで片方だけアップデートすることも可能です。
|
| |
|---|
ファームウェアアップデートはnode-eyeコントロールパネルから与えたURLを使って、Armadilloがダウンロードを行います。上記以外の新たにビルドしたイメージファイルを使う場合は、ArmadilloからアクセスすることのできるHTTPサーバーにファイルを配置してください。
|
| |
|---|
ファイルをHTTPサーバーに配置する際には、ファイルのMD5チェックサムを
"~.md5"
という拡張子を付けて同階層からダウンロードできるようにしてください。MD5チェックサムはファームウェアアップデートの際にファイルの破損を検知するために同時にダウンロードされます。
|
| |
|---|
「アップデート完了時に再起動する」にチェックを入れない場合は、Armadilloが再起動するまで古いファームウェアで稼動し続けます。
|
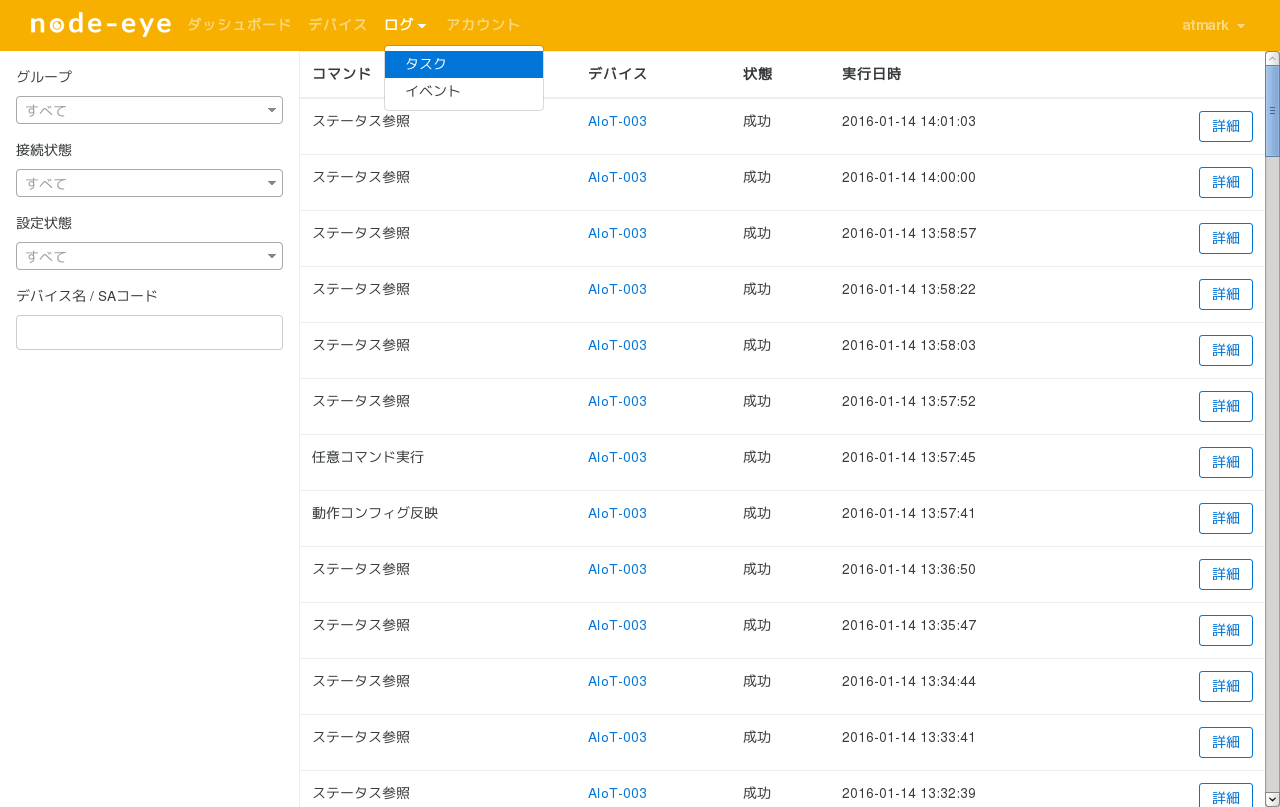
ログにはタスク、イベントの2つがあり、それぞれ、表示される内容が異なります。
[タスク]ではデバイスに対して再起動やコマンド実行を行った結果を参照することができます。
[イベント]では「デバイスの状態が接続中から切断中に変化した」など、デバイスに関するイベントを参照することができます。
[タスク]の一覧を見るには、メニューから[ログ]->[タスク]をクリックしてください。
[イベント]の一覧を見るには、メニューから[ログ]->[イベント]をクリックしてください。



![[警告]](images/warning.png)

![[注記]](images/note.png)