本章では、Armadillo-400 シリーズのハードウェア機能をカスタマイズする方法について説明します。 2.1.1. コンソールとして別のシリアルインターフェースを使用するArmadillo-400シリーズは、標準状態でシリアルインターフェース1(CON3)をコンソールとして使用します。コンソールには、起動ログやカーネルメッセージなどが出力されるため、標準の設定ではシリアルインターフェース1に外部機器を接続して使用するといったことはできません。ここでは、コンソールとして別のシリアルインターフェースを使用する方法について説明します。例として、コンソールをシリアルインターフェース2(CON9 3、CON9 5)に変更します。 第1部「起動の仕組み」でも説明したように、コンソールに文字を表示するプログラムには、ブートローダー、Linuxカーネル、ユーザーランドアプリケーションプログラムの3種類があります。 まず、ブートローダーの起動ログとカーネルメッセージを出力する先を変更します。カーネルメッセージの出力先は、カーネルパラメータのconsoleオプションで指定できます。カーネルパラメータは、ブートローダーのsetenvコマンドで設定します。ブートローダーは、consoleオプションが指定されている場合、それと同じシリアルインターフェースに起動ログを出力します。 カーネルパラメータを設定するには、Armadilloを保守モードで起動して、図2.1「コンソールをシリアルインターフェース2に変更する」のように、使用するシリアルデバイスのデバイスファイル名を入力します。シリアルインターフェースとデバイスファイルの対応は、「Armadillo-400シリーズ ソフトウェアマニュアル」の「UART」の章を参照してください。 現在のカーネルパラメータは、setenvコマンドを引数なしで実行することで確認できます。また、カーネルパラメータの指定を解除し、標準状態にもどすには、clearenvコマンドを使用します。 console=ttymxc2を指定した状態で起動すると、起動ログやカーネルメッセージなどはシリアルインターフェース2に出力されるようになります。但し、ログインプロンプトはまだシリアルインターフェース1に出力されます。
ログインプロンプトをシリアルインターフェース2に表示するには、/etc/inittabと/etc/securettyを修正する必要があります。標準の、Atmark Distで作成したユーザーランドの場合、/etc/inittabは図2.4「標準のinittab」のようになっています。3行目のttymxc1をttymxc2に変更すると、ログインプロンプトをシリアルインターフェース2に表示するようになります。また、/etc/securettyは図2.5「標準のsecuretty」のようになっています。ttymxc2を追加すると、シリアルインターフェース2に表示されたログインプロンプトから、rootユーザーでログインできるようになります。 inittabやsecurettyを変更するには、ユーザーランドを再構築する必要があります。第1部「Atmark Distを使ったルートファイルシステムの作成」などを参照し、使用するプロダクト用に基本的な設定をして、一度ビルドしたAtmark Distを用意してください。そして、atmark-dist/vendors/AtmarkTechno/プロダク
ト名/etc/inittabとatmark-dist/vendors/AtmarkTechno/プロダク
ト名/etc/securettyを図2.6「ログインプロンプトをシリアルインターフェース2にしたinittab」、図2.7「シリアルインターフェース2からのrootログインを許可したsecuretty」に示すように修正してユーザーランドをビルドし、作成されたルートファイルシステムイメージ(romfs.img.gz)をArmadilloのフラッシュメモリのユーザーランド領域に書き込んでください。Armadilloを再起動すると、ログインプロンプトもシリアルインターフェース2に表示されるようになります。
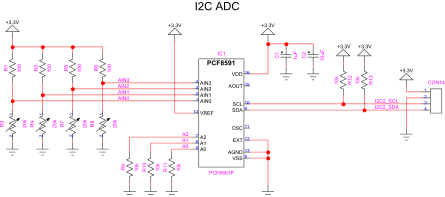
ユーザーランドをDebian GNU/Linuxで構築している場合は、/etc/inittabのログインプロンプトに関連する部分は図2.8「Armadillo-400シリーズ用Debian GNU/Linuxのinittab(抜粋)」のようになっています。ログインプロンプトをシリアルインターフェース2に出力するには、ttymxc1をttymxc2に変更します。また、securettyは、図2.9「Armadillo-400シリーズ用Debian GNU/Linuxのsecuretty(抜粋)」のようになっているので、ttymxc2を追加します。 実際の製品においては、コンソールが使える事自体が問題となる場合もあるでしょう。コンソールへの出力を止めるのも、「コンソールとして別のシリアルインターフェースを使用する」と同様の手順で行うことができます。 コンソールへの出力を止めるには、カーネルパラメータのconsoleにnoneを指定します。 また、/etc/inittabのgettyに関する行は、削除するかコメントアウトします。/etc/securettyに関する設定は、ログインプロンプトを表示しなければ関係ないので、そのままで構いません[]。 Armadillo-400 シリーズでは、CON11とCON14にI2Cバスが出ており、外部のデバイスと接続することができます。Armadillo-440 LCD拡張ボードやArmadillo-400 シリーズRTCオプションモジュール、Armadillo-400シリーズWLANモジュールでは、I2Cバスにリアルタイムクロックを接続しています。ここでは、I2CバスにA/Dコンバーターを接続する方法を紹介します。 使用するソフトウェア、デバイスは以下のとおりです。 - Linuxカーネル: linux-2.6.26-at13
- A/Dコンバーター: PCF8591(NXP社製)
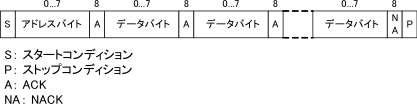
I2C(Inter Integrated Circuit)は、IC間のデータ転送に使われる2線式の通信方式です。正式にはI2Cと記述し、I-squared-C(アイ・スクエアド・シー)と読みます。[] I2Cではシリアルデータライン(SDA)とシリアルクロック(SCL)の2本の信号線のみを使用して通信をおこないます。この2本の信号線に複数のデバイスを接続し、バスを構成することができます。I2Cバスに接続するデバイスの出力段はオープンドレイン(またはオープンコレクタ)とし、信号線はプルアップします。そのため、全てのデバイスがHighを出力しているときだけ信号線はHighとなり、どれかひとつのデバイスがLowを出力すると信号線はLowとなります[]。 I2Cバスに接続されたデバイスは、その役割によってマスタとスレーブに分かれます。マスタとスレーブは、一つのI2Cバスにそれぞれ複数接続することができます。通信は必ずマスタが開始し、バスに接続されたスレーブとデータのやりとりを行います。スレーブはそれぞれ固有のアドレスを持っており、マスタはアドレスを指定することで通信をおこなうスレーブを特定します。Armadillo-400シリーズは、I2Cマスタとなることができます。 I2Cでは、1クロックにつき1bitのデータの転送を行います。そのため、データ転送速度はクロックの速度によって決まります。I2Cにはいくつかのモードがあり、モードごとに転送速度の上限が決まっています。標準モードでは0から100kbit/sec、ファーストモードでは400kbit/secまで、ハイスピードモードでは3.4Mbit/secまでとなっています。Armadillo-400シリーズは、ファーストモードまで対応しています。 データの転送はクロックに同期して行われます。クロックは転送を開始するマスタが生成します。SCLがHighの時にSDAをHighからLowに変化させることで転送が開始されます。これをスタートコンディションと呼びます。また、SCLがHighの時にSDAをLowからHighに変化させることでデータの転送を終了します。これをストップコンディションといいます。スタートコンディションとストップコンディションの発行は、必ずマスターによって行われます。 I2Cでは、1回の転送で複数のバイトを送受信することができます。各バイトの長さは必ず8bitになります。データは最上位ビット(MSB)から順に送信されます。SCLがHighの時のSDAのレベルによって、論理が0(SDA=Low)か1(SDA=High)かが決定します。SCLがHighの間、SDAのレベルは一定でなければなりません。SDAのレベルを変更できるのは、SCLがLowの時だけです。 各バイト(8bit)の転送ごとに、アクノリッジ(ACK)が必要になります。受信側は、正常に通信がおこなえている場合、アクノリッジ信号として、SDAをLowにします。アクノリッジ信号としてSDAをHighにすることで、送信側にデータの終了を知らせることができます。 今回使用するA/DコンバーターPCF8591は、以下の特長を持ちます。 - 単一電源(2.5Vから6V)動作
- I2C接続
- 3つのハードウェアピンでアドレス指定可能
- オンチップ サンプルアンドホールド回路
- 8bit分解能逐次比較型A/D入力×4
- 8bit分解能D/A×1
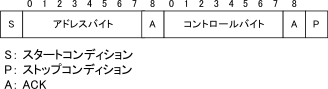
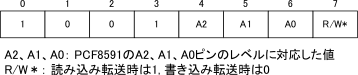
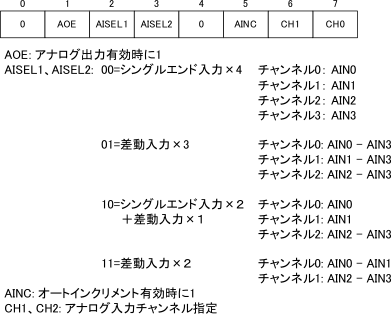
Armadillo-400シリーズと、A/Dコンバーターとの接続を図2.14「I2C接続A/Dコンバーター回路図」に示します。Armadillo-400シリーズのCON14から出ているI2C2にPCF8591を接続します。アドレスを指定するA0、A1、A2ピンは全てプルダウンしておきます。AIN0からAIN3ピンがアナログ入力ピンです。アナログ入力にかかる電圧を、20kΩの可変抵抗で変えられるようにしています。リファレンス電圧VREFに電源電圧と同じ3.3Vを入力しているため、0Vから3.3Vの範囲のアナログ入力を8bit(256段階)のデジタル値に変換します。 PCF8591は内部にレジスタを持っており、レジスタの値を変更することで、デバイスの機能を変更することができます。レジスタへの書き込みは、図2.15「PCF8591通信フォーマット(コントロールバイト書き込み)」に示すフォーマットにしたがっておこないます。 まず、マスタがスタートコンディションを発行し、アドレスバイトを送信します。スレーブからのACKが返ってきたら、続いてコントロールバイトを送信します。再びスレーブからのACKが返ってきたら、ストップコンディションを発行して、レジスタへの書き込みを完了します。 アドレスバイトのフォーマットを図2.16「PCF8591通信フォーマット(アドレスバイト)」に示します。上位7bitでスレーブのアドレスを指定します。A2、A1、A0は、それぞれPCF8591のA2、A1、A0ピンのレベルに対応した値とします。今回の例では全てプルダウンしたので、A2、A1、A0は全て0を指定します。書き込み転送の場合は、R/W*を0とします。 コントロールバイトのフォーマットを図2.17「PCF8591通信フォーマット(コントロールバイト)」に示します。AOEはアナログ出力有効の場合、1を指定します。AISEL1とAISEL0で、どのようにアナログ入力ピンを使用するか指定します。シングルエンド(方線接地)入力×4とする場合は0b00、ディファレンシャル(差動)入力×3とする場合は0b01、シングルエンド入力×2+ディファレンシャル入力×1とする場合は0b10、ディファレンシャル入力×2とする場合は0b11となります。AINCはオートインクリメント有効の時、1を指定します。CH1とCH0にはアナログ入力に使用するチャンネルを指定します。今回の例では、AOE、AISEL1、AISEL0、AINCを全て0とします。 PCF8591からデータを読み出すと、CHで指定したチャンネルの値を得ることができます。データの読み出しは、図2.18「PCF8591通信フォーマット(データバイト読み出し)」に示すフォーマットでおこないます。 まず、マスタがスタートコンディションを発行し、アドレスバイトを送信します。スレーブはアドレスバイトへのACKを返し、続いてデータバイトを送信します。マスタはデータバイトを受信したあと、続けてデータが欲しい場合はACKを返します。データバイトの受信を終了したい場合はNACKを返し、ストップコンディションを発行します。 アドレスバイトのフォーマットは、R/W*が1になる以外、コントロールバイト書き込みの場合と同じです。 データバイトのフォーマットを図2.19「PCF8591通信フォーマット(データバイト)」に示します。PCF8591では、アクノリッジ信号のトレイリングエッジで、指定されたチャンネルの入力電圧がサンプルされ、データバイトの送信中にA/D変換がおこなわれます。そのため、データバイトで転送される値は、一つ前のデータバイト送信中に変換された値となります。なお、パワーオンリセット後の最初のデータバイトで転送される値は、0x80となります。 一般的に、I2C接続のデバイスをLinuxシステムで使用する場合、I2Cスレーブデバイス用のデバイスドライバーを作成して、デバイスの制御をおこないます。今回は、PCF8591専用のデバイスドライバーを作成するのではなく、汎用のi2cdevドライバーを使用することにします。i2cdevドライバーを使用すると、デバイスファイルインターフェースを経由して、ユーザーランドで動作するアプリケーションプログラムからデバイスの制御をおこなうことができます。Armadillo-400シリーズでは、標準のカーネルでi2cdevドライバーが有効になっているため、特に何も設定しなくとも使用可能です。 i2cdevドライバーでは、/dev/i2c-N(Nは0から始まる数値文字)デバイスファイルに対して、open/close/read/write/ioctlシステムコールを発行することで、I2Cデバイスの制御をおこないます。Armadillo-400シリーズで使用できるデバイスファイルを表2.1「I2Cバスとデバイスファイルの対応」に示します。 表2.1 I2Cバスとデバイスファイルの対応 | I2Cバス | コネクタ | デバイスファイル |
|---|
I2C1 | なし[] | /dev/i2c-0
| I2C2 | CON14 | /dev/i2c-1
| I2C3 | CON11 | /dev/i2c-2
|
アプリケーションプログラムでI2Cデバイスの制御をおこなうには、まず、デバイスファイルをオープンします。 デバイスをオープンした後、通信を行うスレーブデバイスを特定するため、スレーブデバイスのアドレスを設定します。これには、ioctlシステムコールを使用します。I2C_SLAVEなどのi2cdevを使用する際に必要となる定義は、<linux/i2c-dev.h>で定義されています。 I2Cスレーブデバイスとのデータ転送をおこなうには、単純にread/writeシステムコールを実行するだけです。スタート/ストップコンディションの発行、アドレスバイトの生成と送信、アクノリッジの処理などは、全てドライバーがおこなってくれるので、アプリケーションプログラム側ではそれらを意識する必要はありません。 i2cdevドライバーに関する詳しい情報は、linux-2.6.26-at13/Documentation/i2c/dev-interfaceを参照してください。 Armadillo-400 シリーズでは、CON9をSPIバスとして使用することができます。ここでは、SPIバスにA/Dコンバータを接続する方法を紹介します。 使用するソフトウェア、デバイスは以下のとおりです。 - Linuxカーネル: linux-2.6.26-at13
- A/Dコンバーター: MCP3204(Microchip社製)
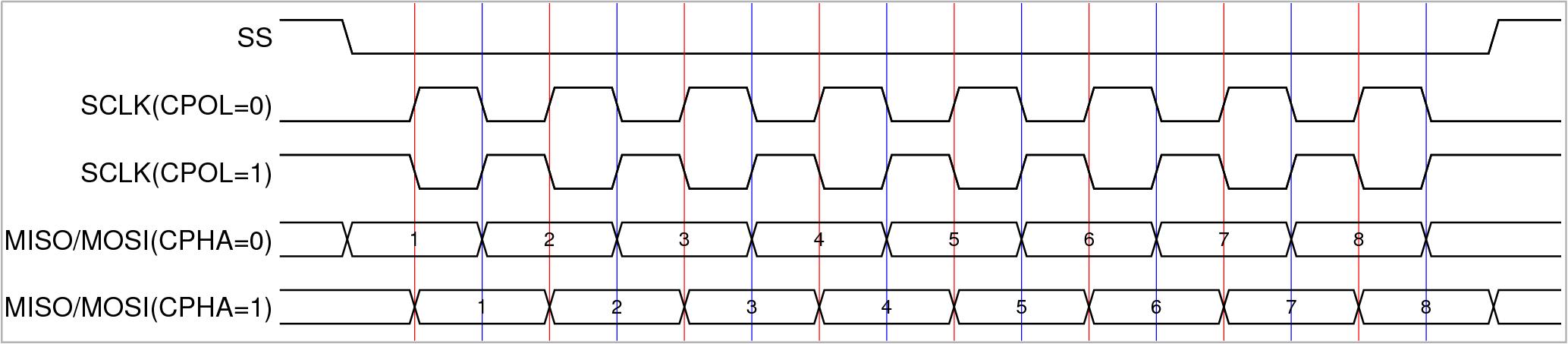
SPI(Serial Peripheral Interface)は、IC間のデータ転送に使われる4線式の通信方式です。SPIでは、シリアルクロック(SCLK)、マスタアウトプット/スレーブインプット(MOSI)、マスタインプット/スレーブアウトプット(MISO)、スレーブセレクト(SS)の4本の信号線を使用して通信をおこないます。これらの信号線に、複数のデバイスを接続してバスを構成することができます。 SPIバスに接続されたデバイスは、その役割によってマスタとスレーブに分かれます。SPIでは、1つのバスに1つのマスタと複数のスレーブを接続できます。通信は必ずマスタが開始し、バスに接続されたスレーブとデータのやりとりを行います。マスタは、通信をおこなうスレーブをSS信号によって特定します。そのため、通常、スレーブ1つにつき1本のSS信号を接続します。Armadillo-400シリーズは、SPIマスタとなることができます。 SPIでは、1クロックにつき1bitのデータ転送をおこないます。そのため、データ転送速度はクロックの速度によって決まります。Armadillo-400シリーズは、約16MHzまで対応できます。 データの転送は、マスタがSS信号をアサートすることで開始されます。SCLK信号に同期して、マスターからスレーブへのデータをMOSIに出力し、スレーブからマスタへのデータをMISOから入力します。データの入出力をおこなう線が分かれているため、全二重の通信をおこなうことができます。一度の転送で送受信できるビット数はデバイスごとに異なり、SPIプロトコルとしての制限はありません。 SPIでは、クロックのポラリティとフェーズを指定できます。それぞれの設定をCPOLとCPHAで表します。 CPOL=0: クロックを出力していないときSCLKをLowに保ちます。 - CPHA=0: クロックの立ち上がりでデータをラッチします。
- CPHA=1: クロックの立ち下がりでデータをラッチします。
CPOL=1: クロックを出力していないときSCLKをHighに保ちます。 - CPHA=0: クロックの立ち下がりでデータをラッチします。
- CPHA=1: クロックの立ち上がりでデータをラッチします。
CPOLとCPHAの組み合わせを、SPIモードで表現する場合もあります。 表2.2 SPIモード | モード | CPOL | CPHA |
|---|
0 | 0 | 0 | 1 | 0 | 1 | 2 | 1 | 0 | 3 | 1 | 1 |
今回使用するA/DコンバーターMCP3204は、以下の特長を持ちます。 - 単一電源(2.7Vから5.5V)動作
- SPI接続
- サンプリング速度 最大100ksps(Vdd=5V時)、50ksps(Vdd=2.7V時)
- オンチップ サンプルアンドホールド
- 12bit分解能逐次比較型A/D入力×4
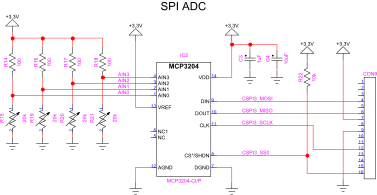
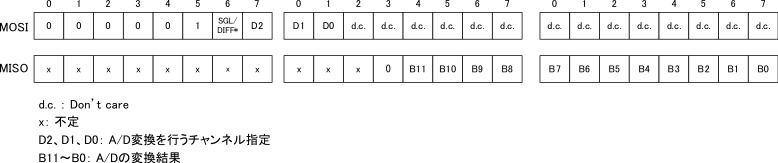
Armadillo-400シリーズと、A/Dコンバーターとの接続を図2.30「SPI接続A/Dコンバーター回路図」に示します。Armadillo-400シリーズのCON9から出ているCSPI3にMCP3204を接続します。SS信号には、CSPI3のSS0を使用します。AIN0からAIN3ピンがアナログ入力ピンです。アナログ入力にかかる電圧を、20kΩの可変抵抗で変えられるようにしています。リファレンス電圧VREFに電源電圧と同じ3.3Vを入力しているため、0Vから3.3Vの範囲のアナログ入力を12bit(4096段階)のデジタル値に変換します。 MCP3204は、SPIモード0(CPOL=0、CPHA=0)またはSPIモード3(CPOL=1、CPHA=1)で通信をおこないます。MCP3204の通信フォーマットを図2.31「MCP3204通信フォーマット」に示します。 MOSIから1を出力することで、転送の開始をMCP3204に指示します。SGL/DIFF*、D2、D1、D0の組み合わせにより、A/D変換をおこなうチャンネルを指定します。D0以降、MOSIから出力されるデータは意味を持ちません。 表2.3 MCP3204チャンネル指定 | SGL/DIFF* | D2[] | D1 | D0 | 入力構成 | チャンネル |
|---|
1 | d.c. | 0 | 0 | シングルエンド | CH0 | 1 | d.c. | 0 | 1 | シングルエンド | CH1 | 1 | d.c. | 1 | 0 | シングルエンド | CH2 | 1 | d.c. | 1 | 1 | シングルエンド | CH3 | 0 | d.c. | 0 | 0 | ディファレンシャル | CH0=IN+、CH1=IN- | 0 | d.c. | 0 | 1 | ディファレンシャル | CH0=IN-、CH1=IN+ | 0 | d.c. | 1 | 0 | ディファレンシャル | CH2=IN+、CH3=IN- | 0 | d.c. | 1 | 1 | ディファレンシャル | CH2=IN-、CH3=IN+ |
MCP3204は、11番目のクロックの上昇部でアナログ入力のサンプリングを開始し、次のクロックの下降部で完了します。A/D変換結果は、B11からB0に出力されます。 一般的に、SPI接続のデバイスをLinuxシステムで使用する場合、SPIスレーブデバイス用のデバイスドライバーを作成して、デバイスの制御をおこないます。今回は、MCP3204専用のデバイスドライバーを作成するのではなく、汎用のspidevドライバーを使用することにします。spidevドライバーを使用すると、デバイスファイルインターフェースを経由して、ユーザーランドで動作するアプリケーションプログラムからデバイスの制御をおこなうことができます。Armadillo-400シリーズでは、標準のカーネルではspidevドライバーが有効になっていないため、spidevを使用するにはカーネルの設定を変更する必要があります。 spidevドライバーでは、/dev/spidevN.M (N、M は0から始まる数値文字)デバイスファイルに対して、open/close/read/write/ioctlシステムコールを発行することで、SPIデバイスの制御をおこないます。Armadillo-400シリーズで使用できるデバイスファイルを表2.4「SPIバスとデバイスファイルの対応」に示します。 表2.4 SPIバスとデバイスファイルの対応 | SPIバス | コネクタ | デバイスファイル |
|---|
CSPI1 | CON9 | /dev/spidev0.M (Mは0または1)
| CSPI3 | CON9 | /dev/spidev2.M (Mは0、1、2、3のいずれか)
|
アプリケーションプログラムでSPIデバイスの制御をおこなうには、まず、デバイスファイルをオープンします。 ioctlシステムコールにより、SPIの設定を変更することができます。 - SPI_IOC_RD_MODE, SPI_IOC_WR_MODE: 読み出しまたは書き込み時に使用するSPIモードを設定します。
- SPI_IOC_RD_LSB_FIRST, SPI_IOC_WR_LSB_FIRST: 読み出しまたは書き込み時にLSBから転送するか、MSBから転送するか設定します。
- SPI_IOC_RD_BITS_PER_WORD, SPI_IOC_WR_BITS_PER_WORD: 1回の読み出しまたは書き込みで転送するビット数を設定します。
- SPI_IOC_RD_MAX_SPEED_HZ, SPI_IOC_WR_MAX_SPEED_HZ: 読み出しまたは書き込みの最大転送速度を設定します。
read/writeシステムコールを使用すると、半二重通信をおこなうことができます。全二重通信をおこなうには、ioctlシステムコールのSPI_IOC_MESSAGE(N)メッセージを使用します。SPI_IOC_MESSAGE(N)の使用方法は、サンプルプログラムで解説します。 spidevドライバーに関する詳しい情報は、linux-2.6.26-at13/Documentation/spi/spidev を参照してください。 Armadillo-400シリーズの標準のカーネルでは、SPIドライバーは有効になっていません。そのため、SPIマスタドライバーとspidevドライバーが有効になったカーネルを作成する必要があります。 まず、カーネルのソースコードアーカイブを取得します。ここでは、Armadillo開発者サイトからダウンロードしてくることにします。 次にArmadillo-400シリーズの標準コンフィギュレーションを適用します。 続いて、menuconfigを使用して、図2.35「SPIドライバーを有効にする」及び図2.36「SPIに使用するピンを指定する」に示すようにカーネルコンフィギュレーションを変更します。 また、カーネルのソースコードにも一部修正が必要になります。SPIスレーブデバイスドライバーを使用するには、spi_board_infoを登録する必要があります。spi_board_infoの登録は、linux-2.6.26-at13/arch/arm/mach-mx25/armadillo400.cでおこなっています。armadillo400_spi3_board_infoを、図2.37「CSPI3、SS0をspidevで使用する修正」に示すように修正してください。 コンフィギュレーションの変更と、ソースの修正をおこなったら、カーネルをビルドします。 正常にビルドが完了すると、linux-2.6.26-at13/linux.bin.gzにカーネルイメージが作成されます。linux.bin.gzをArmadilloのフラッシュメモリのカーネル領域に書き込んでください。 Armadillo-400シリーズでは、CON9 2ピンとCON9 26ピンを1-Wireバスとして使用することができます。ここでは、1-Wireバスに温度センサICを接続する方法を紹介します。 使用するソフトウェア、デバイスは以下のとおりです。 - Linuxカーネル: linux-2.6.26-at13
- 温度センサ: DS18B20(MAXIM社製)
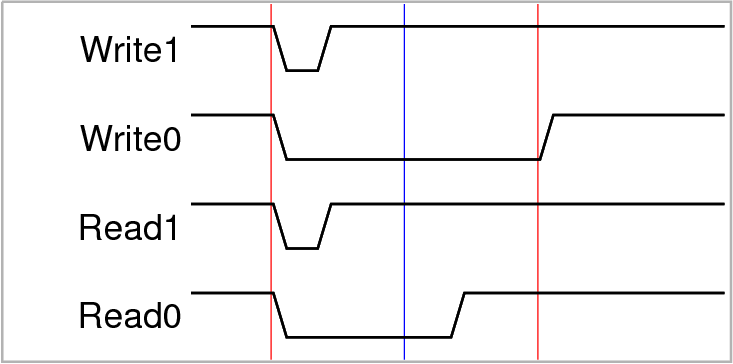
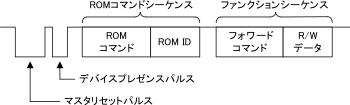
1-Wireは、IC間のデータ転送に使われる1線式の通信方式です。最低限、1本の信号線と接地線の2本だけでバスを構成することができます。このとき、電力は信号線から得ます。なお、電源線を別途用意し、3線で構成することもできます。1-Wireバスに接続されたデバイスの出力段はオープンドレインとし、信号線はプルアップします。 1-Wireバスに接続されたデバイスは、その役割によってマスタとスレーブに分かれます。1-Wireでは、1つのバスに1つのマスタと複数のスレーブを接続できます。通信は必ずマスタが開始し、バスに接続されたスレーブとデータのやりとりを行います。スレーブデバイスは、チップごとに固有な64bitのROM IDを持っており、マスタはROM IDを指定することで通信をおこなうスレーブを特定します。Armadillo-400シリーズは、1-Wireマスタとなることができます。 1-Wireでは、クロック信号がないため、タイムスロットに基づいてデータの転送をおこないます。マスタからスレーブに値を書き込む場合、マスタからローパルスを出力します。パルスの立ち下がりエッジでスレーブ内の単安定マルチバイブレーターが開始し、立ち下がりエッジから約30μsecの時点でサンプリングをおこないます。そのため、マスタは1を書き込む場合は1から15μsecの短いローパルスを出力し、0を書き込む場合は60μsecの長いローパルスを出力します。 スレーブからの値を読み出す場合、まず、マスタがローパルス1から15μsecの短いローパルスを出力します。スレーブ側は、1を送信したい場合何もしません。0を送信したい場合、60μsecの間信号線をローに引っ張ります。マスタは、立ち下がりエッジから30μsecの時点でサンプリングをおこない、スレーブからの出力をサンプリングします。 なお、タイムスロットにはスタンダード(1タイムスロット60μsec)とオーバードライブ(1タイムスロット8μsec)の二つがあります。上記の説明はスタンダードの場合のタイミングです。 マスターとスレーブ間でのデータ転送は3つのシーケンスでおこないます。3つのシーケンスは、リセットシーケンス、ROMコマンドシーケンス、ファンクションシーケンスの順番に実行されます。 リセットシーケンスでは、まず、マスタがリセットパルスを出力します。1-Wireバスにスレーブが接続されている場合、スレーブはプレゼンスパルスを出力します。 ROMコマンドシーケンスでは、マスタが8bitのROMコマンドを出力した後、64bitのROM IDを出力します。ROM IDの先頭8bitはデバイス種類を示すファミリーコードです。続く48bitがシリアルナンバーになっています。最後の8bitはCRCです。ROMコマンドには次のものがあります。 - SERARCH ROM(0xF0): バスに接続されているスレーブデバイスのROM IDを得ることができます。1回のSERARCH ROMコマンドで1つのデバイスのROM IDを特定することができます。
- READ ROM(0x33): バスに接続されているスレーブデバイスが一つだけの場合、SEARCH ROMコマンドの代わりにREAD ROMコマンドを使用して、ROM IDを得ることができます。
- MATCH ROM(0x55): MATCH ROMコマンドでマスタが出力したROM IDに一致したスレーブデバイスが、続くファンクションコマンドに応答します。それ以外のデバイスは、次のリセットシーケンスを待ちます。
- SKIP ROM(0xcc): SKIP ROMコマンドに続いて送信されたファンクションコマンドは、バスに接続されているスレーブデバイス全てに同時に適用されます。
ファンクションシーケンスは、スレーブデバイスごとに異なります。基本的には、マスタが8bitのフォワードコマンド出力した後、データの読み出しまたは書き込みをおこないます。 今回使用する温度センサDS18B20は、以下の特長を持ちます。 - 単一電源(3.0Vから5.5V)動作
- 電源は信号線から供給可能
- 外部部品不要
- 温度計測範囲-55℃から+125℃
- 分解能9bitから12bit
- 変換時間750msec(最大12bit時)
DS18B20のファンクションコマンドには以下のものがあります。 - CONVERT T(0x44): このコマンドにより、温度変換がおこなわれます。変換結果は、DS18B20の内蔵2バイトレジスタに格納されます。
- WRITE SCRATCHPAD(0x48): DS18B20の内蔵メモリに書き込みをおこないます。書き込むデータは3バイト長で、TH、TL、Configuration Registerの順番に送信します。
- READ SCRATCHPAD(0xbe): DS18B20の内蔵メモリを読み出します。読み出すデータのバイト数は最大9バイトです。途中で、マスタからリセットパルスを送信することで、データの読み出しを中断できます。
DS18B20内蔵レジスタは次のようになっています。 表2.5 DS18B20内蔵レジスタ | バイト | 内容 |
|---|
0 | Temperature Register LSB | 1 | Temperature Register MSB | 2 | TH or User Byte 1 | 3 | TL or User Byte 2 | 4 | Configuration Register | 5 | Reserved (0xff) | 6 | Reserved | 7 | Reserved (0x10) | 8 | CRC |
DS18B20の温度センサ分解能は、Configuration Registerの5bit目と6ビット目で決まります。それ以外のConfiguration Registerのビットは内部的に使用され、上書きすることはできません。 表2.6 DS18B20温度センサ分解能 | BIT 6 | BIT 5 | 分解能 |
|---|
0 | 0 | 9 bit | 0 | 1 | 10 bit | 1 | 0 | 11 bit | 1 | 1 | 12 bit[] |
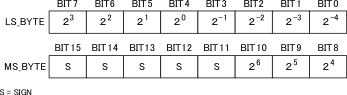
Temperature Registerのフォーマットは次のようになっています。温度は摂氏で格納されています。12ビット分解能の場合は、BIT10からBIT0全てのビットが有効です。11ビット分解能の場合、BIT0が不定となります。10ビット、9ビット分解能の場合も同様です。BIT15からBIT11は、温度が正の場合0、負の場合1となります。 一般的に、1-Wire接続のデバイスをLinuxシステムで使用する場合、1-Wireスレーブデバイス用のデバイスドライバーを作成して、デバイスの制御をおこないます。今回は、1-Wireスレーブデバイスドライバーの「Thermal family implementation」を使用します。 「Thermal family implementation」を使用すると、1-Wireバスに接続された温度センサデバイスを自動で検出し、sysfs経由で温度データの読み出しを可能にします。 /sys/devices/w1_bus_master1/が、1-Wireに関連するsysfsディレクトリです。「Thermal family implementation」が有効になっていて、スレーブデバイスが検出されると、28-0000022e2355のようにデバイスのROM ID に対応したディレクトリが作成されます。その中のw1_slaveを読み出すと、ドライバーはCONVERT Tコマンドを実行したあとREAD SCRATCHPADコマンドを実行し、DS18B20の内蔵レジスタを表示します。「crc=xx YES」でCRCが一致したことを表します。また、「t=28250」は温度(摂氏)を1000倍した値を示します。1度の読み出しで、2回分の変換結果を表示します。
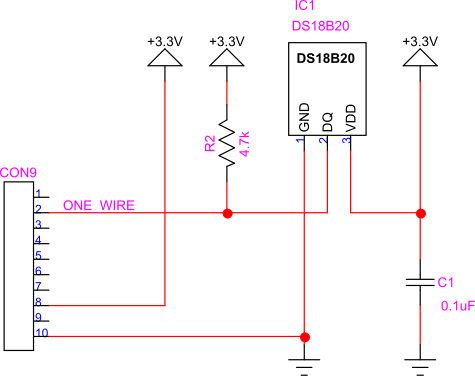
Armadillo-400シリーズの標準のカーネルでは、1-Wireドライバーは有効になっていません。そのため、1-Wireマスタドライバーと「Thermal familyimplementation」ドライバーが有効になったカーネルを作成する必要があります。 まず、カーネルのソースコードアーカイブを取得します。ここでは、Armadillo開発者サイトからダウンロードしてくることにします。 次にArmadillo-400シリーズの標準コンフィギュレーションを適用します。 続いて、menuconfigを使用して、図2.53「1-Wireドライバーを有効にする」に示すようにカーネルコンフィギュレーションを変更します。 コンフィギュレーションの変更をおこなったら、カーネルをビルドします。 正常にビルドが完了すると、linux-2.6.26-at13/linux.bin.gzにカーネルイメージが作成されます。linux.bin.gzをArmadilloのフラッシュメモリのカーネル領域に書き込んでください。 図2.49「1-Wire接続温度センサ回路図」に示すようにArmadilloとDS18B20を接続してからArmadilloを起動し、図2.50「1-Wire接続温度センサドライバーの使用例」に示す手順で動作確認をおこなってください。 Armadillo-400 シリーズでは、CON14をCANバスとして使用することができます。ここでは、Armadillo同士をCANで接続する方法を紹介します。 使用するソフトウェア、デバイスは以下のとおりです。 - Linuxカーネル: linux-2.6.26-at13
- ユーザーランド: Atmark Dist v20101220
- CAN通信プログラム: can-utils (Atmark Distに含まれるもの)
- CANトランシーバー: AMIS-42673(ON Semiconductor社製)
CAN(Controller Area Network)は、機器間のデータ転送に使われる、2線差動電圧式の通信方式です。差動電圧式を採用しているため耐ノイズ性に優れる点や、エラー検出方法と検出後の動作が明確化されているといった特長から、比較的信頼性の求められるネットワークに用いられます。 CANでは、CAN+とCAN-の2本の信号線間の電圧差を変化させることで通信をおこないます。この2本の信号線に複数のノード(機器)を接続し、バスを構成します。CANの物理的な仕様に関連する規格には、通信速度が125kbpsまでの低速CAN(ISO1159-2)、通信速度125kbpsから1Mbpsの高速CAN(ISO11898-2)など様々なものがあります。一般的にCANのノードは、物理層の処理をおこなうCANトランシーバとその後のデータ処理をおこなうCANコントローラから構成されます。今回の例では、CANコントローラはi.MX25内蔵のFlexCANコントローラを使用し、CANトランシーバにはISO 11898-2に対応したAMIS-42673を使用します。 CANプロトコルでは、CAN+とCAN-間の電圧差を、RS232C通信のようにあらかじめ決められた通信速度(ビットレート)に従って変化させることで、データの転送をおこないます。転送される各ビットは、ドミナントかリセッシブのいずれかの状態を取ります。高速CANでは、CAN+とCAN-の電圧差がある場合ドミナント、無い場合リセッシブとなります。通常、ドミナントを論理0、リセッシブを論理1として扱います。CANはマルチマスタ構成のため、複数のデバイスが同時に通信をおこない、バス上でデータの衝突がおこる場合があります。この場合、どれか一つのノードがドミナントを出力していた場合、バスの状態はドミナントとなります(ドミナントがリセッシブに対して優先される)。CANでは、この特性を利用して調停をおこないます。 データの転送は、フレームという単位でおこないます。フレームには、表2.7「CANプロトコルフレーム」に示す4つの種類があります。 表2.7 CANプロトコルフレーム | 名称 | 機能 |
|---|
データフレーム | データを送信する。 | リモートフレーム | データフレームを要求する。 | オーバーロードフレーム | 前回のフレーム処理が完了していないことを通知する。 | エラーフレーム | エラーが発生したことを通知する。 |
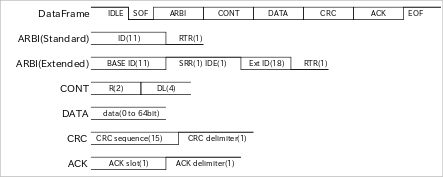
データフレームとリモートフレームを合わせて、メッセージフレームといいます。CANでは、ノードごとのアドレスというものはなく、その代わりにそれぞれのメッセージが固有なID(識別子、Identifire)を持っています。受信ノードは、IDによって、自分が処理すべきメッセージかどうか判断します。メッセージに含まれるIDの長さによって、メッセージフレームには標準フォーマット(11bit長)と拡張フォーマット(29bit長)の2種類の形式があります。 データフレームの形式を図2.55「CANプロトコル(データフレーム)」に示します。上の線はリセッシブを、下の線はドミナントを意味します。データフレームは、データを送信するノードがバスをドミナントにすることから始まります。これをスタート・オブ・フレーム(SOF)と呼びます。SOFに続き、アービトレーションフィールド(ARBI)、コントロールフィールド(CONT)、データフィールド(DATA)、CRCフィールド(CRC)が順に送信されます。続いて、受信ノードはACKフィールド(ACK)を送信します。最後に、7ビット分バスをリセッシブに保ちエンド・オブ・フレーム(EOF)とします。 アービトレーションフィールドは、標準フォーマットか拡張フォーマットかによって異なります。標準フォーマットの場合、11bitのIDを送信したあと、リモート・トランスミッション・リクエスト・ビット(RTR)にドミナントを送信します。拡張フォーマットの場合、11bitのベースID(BASE ID)を送信したあと、代替リモート・リクエスト・ビット(SRR)、アイデンティファイヤ・エクステンション・ビット(IDE)として、2bit分バスをリセッシブに保ちます。続いて、18bitの拡張ID(Ext ID)を送信したあと、RTRにドミナントを送信します。 ![[注記]](images/note.png) | CANプロトコルのバリエーション |
|---|
CANプロトコルには、バージョン2.0Aと2.0Bの2つがあります。プロトコルバージョン2.0Aでは、標準フォーマットしか扱うことができません。もし拡張フォーマットのフレームを受信した場合、エラーフレームを送信します。プロトコルバージョン2.0Bパッシブでは、拡張フォーマットの送信はできませんが、拡張フォーマットを受信しても、無視します。プロトコルバージョン2.0Bアクティブでは、拡張フォーマットの送受信が可能です。 Armadillo-400シリーズは、プロトコルバージョン2.0Bアクティブに対応しています。 |
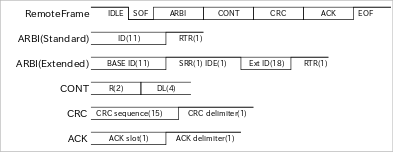
コントロールフィールドは、最初の2ビットが予約ビットとなっており、常にドミナントとします。続く4bitのデータ長コード(DLC)に送信するデータのバイト数を送信します。そのため、データフィールドは0から8バイト(64bit)長となります。 CRCフィールドのCRCシーケンス(CRC sequence)には、SOFからデータフィールドまでのCRC(Cyclic Redundancy Check)を送信します。CRCフィールドの区切りを示すCRCデリミタとして、1bit分リセッシブとします。 受信ノードは、受信したメッセージのCRCが一致した場合、ACKスロット(ACK slot)でドミナントを送信します。ACKスロットでバスがドミナントとなることで、送信ノードは少なくとも一つの受信ノードがデータフィールドを正常に受信できたことを確認できます。ACKスロットに続いて、ACKフィールドの区切りを示すACKデリミタ(ACK delimiter)として、1bit分リセッシブとします。 リモートフレームは、データフレームの要求に使用されます。リモートフレームを受信したノードは、リモートフレームで指定されたIDと同じIDのメッセージを返信します。リモートフレームの形式を、図2.56「CANプロトコル(リモートフレーム)」に示します。RTRをリセッシブにして、データフィールドが無い以外、データフレームと同じです。DLCは、リモートフレームへの返信として帰ってくるデータフレームのデータ長と同一にします。 メッセージフレームのアービトレーションフィールドという名前は、このフィールド送信中にバスの調停をおこなうことに由来します。同時に複数のノードがメッセージの送信を開始した場合、バスの衝突が発生します。送信ノードは、各ビットでバスの状態を確認し、もし自身がリセッシブを送信したにも関わらず、バスがドミナントとなっていた場合、以後の送信を中止します。そのため、より小さなIDが優先して送信されます。また、RTRにより、リモートフレームよりもデータフレームが優先されます。 オーバーロードフレームとエラーフレームは、一般にCANコントローラによって自動で処理されます。そのため、ここでは説明を割愛します。 | 同期とビット・スタッフィング・ルール |
|---|
CANでは、ビットレートに従ってデータの送受信をおこなうため、ノードごとのクロックに誤差がある場合、タイミングが少しずつずれていきます。これを補正するため、バスがリセッシブからドミナントへ変化するとき、タイミングの同期をおこないます。 しかし、リッセシブやドミナントだけが続いた場合、この同期が行われないことになります。そこで、ビット・スタッフィング・ルールが適用されます。これは、同じ状態が5bit連続した場合、反対の状態のビット(スタッフビット)を一つ送信するルールです。このルールにより、一定期間内に必ず同期が行われることを保証しています。 なお、ビット・スタッフィング・ルールの処理はCANコントローラで自動で行われるため、ユーザー側は通常それを意識することはありません。 |
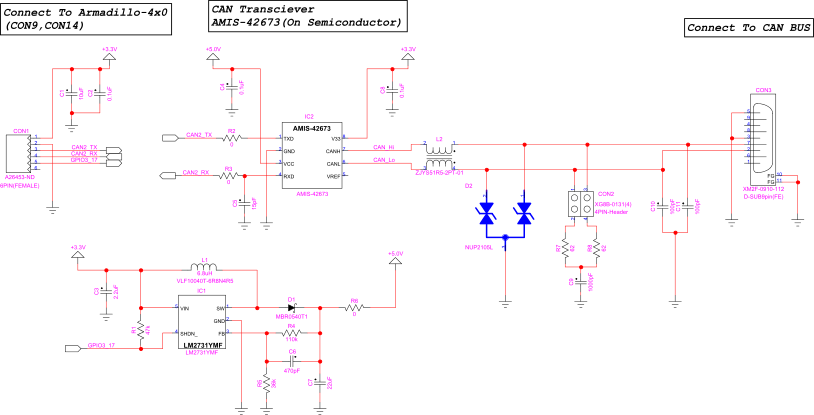
Armadillo-400シリーズとCANトランシーバーとを接続する回路図を、図2.57「CAN接続回路図」に示します。ArmadilloのCON14から出ているCAN2を使用します。CANトランシーバーには、AMIS-42673(ON Semiconductor社製)を使用します。LM2731YMF(National Semiconductor社製)は、3.3Vから5Vを生成するスイッチングコンバーターです。CON9 2(GPIO3_17)で出力のON/OFFを切り替えることができます。 Armadillo-400シリーズ同士を接続する場合は、次のように接続してください。3つ以上のArmadilloを接続しても構いません。 Armadillo-400シリーズのCAN機能は、SocketCANフレームワーク[]を使用して実装されています。SockatCANでは、通常のネットワークデバイスと同様に、socketインターフェースを用いてデータの送受信を行います。 CAN通信をおこなうプログラムは、TCP/IPなどを用いたネットワークプログラムと同様に記述できます。図2.59「CANソケットのオープン」に、CAN通信用のソケットをオープンし、can0インターフェースに関連付けるコード例を示します。プロトコルファミリーには、PF_CANを指定します。プロトコルには、ローソケットプロトコル(CAN_RAW)または、ブロードキャストマネージャ(BCM)を指定します。bindシステムコールでCANインターフェースとソケットを関連付けます。 以降の処理は、通常のネットワークプログラムと同様です。CANメッセージの送受信には、read/writeシステムコールや、send/sendto/sendmsgシステムコール、recv/recvfrom/recvmsgシステムコールを使用できます。 SocketCANに関する詳しい情報は、linux-2.6.26-at13/Documentation/networking/can.txtを参照してださい。 SocketCANフレームワークでは、sysfsインターフェースを用いて、CAN通信に関わる設定をおこないます。CAN2を使用する場合、/sys/devices/platform/FlexCAN.1/以下のファイルを使用します。使用可能なsysfsファイルの一覧は、「Armadillo-400シリーズ ソフトウェアマニュアル」の「CAN」を参照してください。 通常のSocketCANフレームワークには無い、Armadillo-400シリーズ独自の拡張として、リモートフレームのサポートを追加しています。set_resframeファイルに、ID#DATA Armadillo-400シリーズの標準のカーネルでは、CANドライバーは有効になっていません。そのため、CANドライバーが有効になったカーネルを作成する必要があります。 まず、カーネルのソースコードアーカイブを取得します。ここでは、Armadillo開発者サイトからダウンロードしてくることにします。 次にArmadillo-400シリーズの標準コンフィギュレーションを適用します。 続いて、menuconfigを使用して、図2.62「CANドライバーを有効にする」及び図2.63「CANに使用するピンを指定する」に示すようにカーネルコンフィギュレーションを変更します。 コンフィギュレーションの変更と、ソースの修正をおこなったら、カーネルをビルドします。 正常にビルドが完了すると、linux-2.6.26-at13/linux.bin.gzにカーネルイメージが作成されます。linux.bin.gzをArmadilloのフラッシュメモリのカーネル領域に書き込んでください。 Atmark Distには、CAN通信プログラムのサンプルとしてcan-utilsが含まれています。can-utilsには、一つのメッセージを送信するcansend、複数のメッセージを連続して送信するcangen、受信したメッセージを表示するcandumpがあります。今回は、これらを使用してCANの動作確認をおこなうことにします。 第1部の「Atmark Distを使ったルートファイルシステムの作成」などを参照し、使用するプロダクト用に基本的な設定をして一度ビルドしたAtmark Distを用意してください。can-utilsを使用可能にするには、Atmark Distのユーザーランドコンフィギュレーションで以下の項目にチェックを入れます。 これらを選択した状態でユーザーランドをビルドし、作成されたルートファイルシステムイメージ(romfs.img.gz)をArmadilloのフラッシュメモリのユーザーランド領域に書き込んでください。 実際に、CANバスを通じてArmadillo同士で通信をおこなう手順を説明します。 まず、通信速度を設定します。通信速度は送受信をおこなうノード全てで一致している必要があるので、それぞれのArmadilloでおこなってください。FlexCANフレームワークを使っている場合、通信速度はsysfsインターフェースで設定します。通信速度は図2.66「CAN通信速度の計算式」に示す式で算出します。通信速度の設定例を表2.8「CAN通信速度の設定例」に示します。 表2.8 CAN通信速度の設定例 | 通信速度 | br_clksrc | br_presdiv | br_propseg | br_pseg1 | br_pseg2 |
|---|
500000 | bus | 7 | 5 | 5 | 8 | 1007575 | bus | 3 | 7 | 7 | 7 | 950000 | bus | 5 | 4 | 5 | 5 | 25000 | bus | 133 | 6 | 6 | 7 | 10390 | bus | 256 | 8 | 8 | 8 | 945231 | osc | 2 | 4 | 4 | 5 |
次に、CANインターフェースを有効にします。これも、それぞれのArmadilloで実行します。 CANメッセージを受信するArmadilloで、candumpを実行しておきます。 別のArmadilloでcansendを実行すると、一つのメッセージを送信できます。図2.69「CANメッセージの送信」の例では、ID=0x5a5、データ=0x1234567を送信しています。 candumpコマンドを実行している受信側のArmadlloでは、メッセージを受信すると図2.70「CANメッセージの受信」に示しすような表示が得られます。 また、cangenを実行すると、連続したメッセージを送信できます。オプションにCANインターフェース名だけを指定した場合、cangenはアドレス、データ共にランダムな値を送信します。 candumpを実行している受信側のArmadilloでは、図2.72「連続したCANメッセージの受信」に示すような受信結果が得られます。 IEEE 802.11b/g/n対応のUSB無線LANモジュールをArmadillo-400シリーズに接続して使用方法について紹介します。現在入手可能なUSB無線LANデバイスのほとんどは、RaLink社製モジュールを内蔵しているものとRealtek社製モジュールを内蔵しているものの、いずれかのようです。ここで紹介する方法は、RaLink社製モジュールRT8070/RT3070/RT3370を内蔵しているものを対象とします。 使用するソフトウェア、デバイスは以下のとおりです。 - Linuxカーネル: linux-2.6.26-at13
- ユーザーランド: Atmark Dist v20101220
- USB無線LANドライバー: 2010_0831_RT3070_Linux_STA_v2.4.0.1_DPO
USB無線LANモジュール[] - GW-USMicroN (Planex社製)
- GW-USMicroN-G (Planex社製)
- GW-USMicro300 (Planex社製)
- LAN-W150N/U2D (Logitec社製)
おおまかな手順としては、次のようになります。 - USB無線LANドライバーのソースコードアーカイブの取得
- USB無線LANドライバーのビルド
- USB無線LANの設定
2.6.1. USB無線LANドライバーのソースコードアーカイブの取得USB無線LANモジュールのドライバーはLinuxカーネルに含まれていないため、メーカーのサイトからソースコードをダウンロードしてきて、ビルドする必要があります。作業用PCのWebブラウザでRaLink社のLinuxドライバーページ[]にアクセスし、「RT8070/RT3070/RT3370 USB」をクリックしてください。ライセンス(GPL v2)に同意するかを聞かれるページに移動するので、ライセンスに同意する場合は、「Your Name」と「Your Email」を入力して「Accept」をクリックします。すると、USB無線LANドライバーのソースコードアーカイブ2010_0831_RT3070_Linux_STA_v2.4.0.1_DPO.bz2をダウンロードできます。 ダウンロードしたソースコードアーカイブをビルドし、ユーザーランドに組み込みます。事前に、第1部「Atmark Distを使ったルートファイルシステムの作成」などを参照し、使用するプロダクト用に基本的な設定をして、一度ビルドしたAtmark Distを用意してください。 まずは、ソースコードアーカイブを展開します。ソースコードアーカイブは、atmark-distディレクトリと同じディレクトリに置いてから展開してください。 Armadillo用にドライバーをビルドするために、いくつか修正が必要です。修正はパッチにまとめてあるので、パッチをダウンロードして適用します。 パッチの内容は、図2.75「USB無線LANドライバーへのパッチ」に示すものです。Armadillo用にビルドするための設定、生成物(カーネルモジュール、設定ファイル)をatmark-distにコピーする処理、いくつかのデバイスサポートを追加しています。 diff -urN 2010_0831_RT3070_Linux_STA_v2.4.0.1_DPO/Makefile 2010_0831_RT3070_Linux_STA_v2.4.0.1_DPO-armadillo/Makefile
--- 2010_0831_RT3070_Linux_STA_v2.4.0.1_DPO/Makefile 2010-08-31 18:12:20.000000000 +0900
+++ 2010_0831_RT3070_Linux_STA_v2.4.0.1_DPO-armadillo/Makefile 2010-12-10 14:11:18.000000000 +0900
@@ -15,7 +15,8 @@
RTMP_SRC_DIR = $(RT28xx_DIR)/RT$(CHIPSET)
#PLATFORM: Target platform
-PLATFORM = PC
+#PLATFORM = PC
+PLATFORM = ARMADILLO
#PLATFORM = 5VT
#PLATFORM = IKANOS_V160
#PLATFORM = IKANOS_V180
@@ -147,6 +148,12 @@
CROSS_COMPILE =
endif
+ifeq ($(PLATFORM),ARMADILLO)
+DIST_SRC = `pwd`/../atmark-dist
+LINUX_SRC = $(DIST_SRC)/linux-2.6.x
+CROSS_COMPILE = arm-linux-gnueabi-
+endif
+
ifeq ($(PLATFORM),IXP)
LINUX_SRC = /project/stable/Gmtek/snapgear-uclibc/linux-2.6.x
CROSS_COMPILE = arm-linux-
@@ -347,6 +354,11 @@
cp -f $(RT28xx_DIR)/os/linux/rtnet$(CHIPSET)apsta.ko /tftpboot
endif
else
+ifeq ($(PLATFORM),ARMADILLO)
+ mkdir -p $(DIST_SRC)/romfs/lib/modules $(DIST_SRC)/romfs/etc/Wireless/RT2870STA
+ cp -f $(RT28xx_DIR)/os/linux/rt$(CHIPSET)sta.ko $(DIST_SRC)/romfs/lib/modules
+ cp -f RT2870STA.dat $(DIST_SRC)/romfs/etc/Wireless/RT2870STA
+else
cp -f $(RT28xx_DIR)/os/linux/rt$(CHIPSET)sta.ko /tftpboot
ifeq ($(OSABL),YES)
cp -f $(RT28xx_DIR)/os/linux/rtutil$(CHIPSET)sta.ko /tftpboot
@@ -355,6 +367,7 @@
endif
endif
endif
+endif
release:
@@ -388,6 +401,9 @@
$(MAKE) -C os/linux clean
rm -rf os/linux/Makefile
endif
+ifneq ($(TARGET),THREADX)
+ $(MAKE) -C tools clean
+endif
ifeq ($(TARGET), UCOS)
$(MAKE) -C os/ucos clean MODE=$(RT28xx_MODE)
endif
diff -urN 2010_0831_RT3070_Linux_STA_v2.4.0.1_DPO/RT2870STA.dat 2010_0831_RT3070_Linux_STA_v2.4.0.1_DPO-armadillo/RT2870STA.dat
--- 2010_0831_RT3070_Linux_STA_v2.4.0.1_DPO/RT2870STA.dat 2010-08-31 18:12:20.000000000 +0900
+++ 2010_0831_RT3070_Linux_STA_v2.4.0.1_DPO-armadillo/RT2870STA.dat 2010-12-09 23:07:37.000000000 +0900
@@ -1,8 +1,8 @@
#The word of "Default" must not be removed
Default
CountryRegion=5
-CountryRegionABand=7
-CountryCode=
+CountryRegionABand=1
+CountryCode=JP
ChannelGeography=1
SSID=11n-AP
NetworkType=Infra
diff -urN 2010_0831_RT3070_Linux_STA_v2.4.0.1_DPO/common/rtusb_dev_id.c 2010_0831_RT3070_Linux_STA_v2.4.0.1_DPO-armadillo/common/rtusb_dev_id.c
--- 2010_0831_RT3070_Linux_STA_v2.4.0.1_DPO/common/rtusb_dev_id.c 2010-09-01 10:47:30.000000000 +0900
+++ 2010_0831_RT3070_Linux_STA_v2.4.0.1_DPO-armadillo/common/rtusb_dev_id.c 2010-12-10 15:23:56.000000000 +0900
@@ -66,6 +66,8 @@
{USB_DEVICE(0x13D3,0x3305)}, /* AzureWave 3070*/
{USB_DEVICE(0x1044,0x800D)}, /* Gigabyte GN-WB32L 3070 */
{USB_DEVICE(0x2019,0xAB25)}, /* Planex Communications, Inc. RT3070 */
+ {USB_DEVICE(0x2019,0xAB29)}, /* Planex Communications, Inc. */
+ {USB_DEVICE(0x2019,0xED14)}, /* Planex Communications, Inc. */
{USB_DEVICE(0x2019,0x5201)}, /* Planex Communications, Inc. RT8070 */
{USB_DEVICE(0x07B8,0x3070)}, /* AboCom 3070 */
{USB_DEVICE(0x07B8,0x3071)}, /* AboCom 3071 */
@@ -84,6 +86,7 @@
{USB_DEVICE(0x1D4D,0x0011)}, /* Pegatron Corporation 3072 */
{USB_DEVICE(0x5A57,0x5257)}, /* Zinwell 3070 */
{USB_DEVICE(0x5A57,0x0283)}, /* Zinwell 3072 */
+ {USB_DEVICE(0x04BB,0x0944)}, /* I-O DATA */
{USB_DEVICE(0x04BB,0x0945)}, /* I-O DATA 3072 */
{USB_DEVICE(0x04BB,0x0947)}, /* I-O DATA 3070 */
{USB_DEVICE(0x04BB,0x0948)}, /* I-O DATA 3072 */
@@ -106,9 +109,16 @@
{USB_DEVICE(0x13D3,0x3307)}, /* Azurewave */
{USB_DEVICE(0x13D3,0x3321)}, /* Azurewave */
{USB_DEVICE(0x07FA,0x7712)}, /* Edimax */
- {USB_DEVICE(0x0789,0x0166)}, /* Edimax */
+ {USB_DEVICE(0x0789,0x0162)}, /* Logitec */
+ {USB_DEVICE(0x0789,0x0163)}, /* Logitec */
+ {USB_DEVICE(0x0789,0x0164)}, /* Logitec */
+ {USB_DEVICE(0x0789,0x0166)}, /* Logitec */
+ {USB_DEVICE(0x0789,0x0168)}, /* Logitec */
{USB_DEVICE(0x0DB0,0x822B)}, /* MSI 3070*/
{USB_DEVICE(0x0DB0,0x871B)}, /* MSI 3070*/
+ {USB_DEVICE(0x0411,0x015D)}, /* Buffalo */
+ {USB_DEVICE(0x0411,0x016F)}, /* Buffalo */
+ {USB_DEVICE(0x0411,0x01A2)}, /* Buffalo */
#endif // RT3070 //
#ifdef RT3370
{USB_DEVICE(0x148F,0x3370)}, /* Ralink 3370 */
diff -urN 2010_0831_RT3070_Linux_STA_v2.4.0.1_DPO/os/linux/config.mk 2010_0831_RT3070_Linux_STA_v2.4.0.1_DPO-armadillo/os/linux/config.mk
--- 2010_0831_RT3070_Linux_STA_v2.4.0.1_DPO/os/linux/config.mk 2010-08-31 18:12:20.000000000 +0900
+++ 2010_0831_RT3070_Linux_STA_v2.4.0.1_DPO-armadillo/os/linux/config.mk 2010-12-10 14:05:40.000000000 +0900
@@ -148,7 +148,7 @@
# config for STA mode
ifeq ($(RT28xx_MODE),STA)
-WFLAGS += -DCONFIG_STA_SUPPORT -DDBG
+WFLAGS += -DCONFIG_STA_SUPPORT #-DDBG
ifeq ($(HAS_XLINK),y)
WFLAGS += -DXLINK_SUPPORT
@@ -545,6 +545,10 @@
endif
endif
+ifeq ($(PLATFORM),ARMADILLO)
+EXTRA_CFLAGS := $(WFLAGS) -I$(RT28xx_DIR)/include -O3
+endif
+
#If the kernel version of RMI is newer than 2.6.27, please change "CFLAGS" to "EXTRA_FLAGS"
ifeq ($(PLATFORM),RMI)
EXTRA_CFLAGS := -D__KERNEL__ -DMODULE=1 -I$(LINUX_SRC)/include -I$(LINUX_SRC)/include/asm-mips/mach-generic -I$(RT28xx_DIR)/include -Wall -Wstrict-prototypes -Wno-trigraphs -O2 -fno-strict-aliasing -fno-common -DCONFIG_IFX_ALG_QOS -DCONFIG_WAN_VLAN_SUPPORT -fomit-frame-pointer -DIFX_PPPOE_FRAME -G 0 -fno-pic -mno-abicalls -mlong-calls -pipe -finline-limit=100000 -mabi=32 -G 0 -mno-abicalls -fno-pic -pipe -msoft-float -march=xlr -ffreestanding -march=xlr -Wa,--trap, -nostdinc -iwithprefix include $(WFLAGS)図2.75 USB無線LANドライバーへのパッチ パッチを適用したドライバーをビルドするには、makeコマンドを実行してください。正常にビルドできると、カーネルモジュール(rt3370sta.ko)がatmark-dist/romfs/lib/modules/に、設定ファイル(RT2870STA.dat)がatmark-dist/romfs/etc/Wireless/RT2870STA/にコピーされます atmark-distに移動し、make
imageコマンドを実行すると、USB無線LANモジュールのカーネルモジュールを含んだルートファイルシステムイメージ(romfs.img.gz)が作成されます。それを、Armadilloのフラッシュメモリのユーザーランド領域に書き込んでください。
ここからは、Armadillo実機での作業になります。まずは、設定ファイル/etc/Wireless/RT2870STA/RT2870STA.datをアクセスポイントに合わせて設定します。例として、ESSID=my-essid、認証方式=WPA-PSK、暗号化方式=AES、WPA共有キー=my-preshared-keyの場合、図2.78「RT2870STA.dat設定例」のように設定します。設定ファイルの記述方法は、2010_0831_RT3070_Linux_STA_v2.4.0.1_DPO/README_STA_usbを参照してください。 ArmadilloにUSB無線LANモジュールを接続すると、図2.79「USB無線LANモジュールを接続したときに表示されるカーネルメッセージ」に示すようなカーネルメッセージが表示されます。(カーネルメッセージは、接続するポートによって異なります。) insmodコマンドで、カーネルモジュールをロードします。 ifconfigコマンドで、ネットワークインターフェースを有効にします。ネットワークインターフェース名はra0です。 後は、通常のネットワークデバイスと同様にIPアドレスの設定などをおこなってください。また、iwconfig、iwlist、iwprivコマンドを利用して無線LAN接続の状態確認や管理ができます。 USB接続のWebカメラを使用する例として、カメラで撮影した映像をストリーミング配信し、Webブラウザから閲覧する方法を紹介します。現在入手可能なUSB接続のカメラは、ほとんどものがUVC(USB Video Class)対応のものとなっています。Armadillo-400シリーズでは、UVCクラス対応のカメラであれば、大抵のものが使用可能です[]。 使用するソフトウェア、デバイスは以下のとおりです。 - Linuxカーネル: linux-2.6.26-at13
- ユーザーランド: Atmark Dist v20101220
- ビデオサーバー: MJPG-streamer (Atmark Distに含まれるもの)
- Webカメラ: Qcam Orbit AF「Logicool(Logitech社)製」[]
Armadillo-420ベーシックモデル開発セットの場合、標準状態で、UVC対応Webカメラを接続すると、自動でそれを認識しビデオサーバーを起動するようになっています。つまり、Webカメラを接続するだけで、Webブラウザでリモートからカメラ画像を閲覧可能な状態になります[]。 ここでは、Armadillo-440を対象にArmadillo-420ベーシックモデル開発セットで行っていることと同じ機能を実現します。手順としては、次のようになります。なお、LinuxカーネルのUVC対応機能は標準で有効になっているため、カーネルを変更する必要はありません。標準のものを使用してください。 - MJPG-streamerの動作を確認する
- Webカメラが接続されたら、MJPG-streamerが自動起動するよう設定する
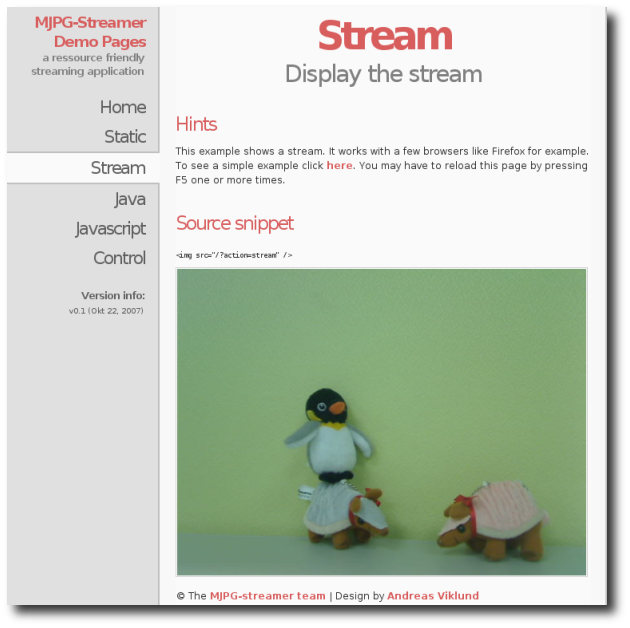
MJPG-streamerの自動起動設定を行う前に、単体で動作することを確認しましょう。 Armadillo-440にWebカメラ(Qcam Orbit AF)を接続すると、コンソールに以下のような表示が出力されます。Webカメラは多くの帯域を消費しますので、USB High Speedポート(CON5 下段)に接続してください。 Webカメラが認識されると、ビデオ入力用のデバイスファイル/dev/video0が作成されます。これを引数として、図2.83「mjpg_streamerコマンドの実行」に示すコマンドを実行すると、MJPG streamerが起動します。MJPG streamerが動作している状態でhttp://ArmadilloのIPアドレス/:8080にアクセスすると、図2.84「MJPG-Streamer Demo Pages画面」が表示されます。静止画、動画、およびPan/Tilt/LEDのOn/Off等の制御をすることができます[]。 mjpg_streamerコマンドの引数のとり方は少々特殊です。-iオプションに続き、入力に関する引数を「"」で囲って指定します。出力に関する引数は、-oオプションの後に指定します。 表2.9 mjpg_streamerコマンドの引数 | 引数 | 説明 |
|---|
/usr/lib/mjpg_streamer/input_uvc.so
| UVCカメラからの入力を処理する入力プラグイン使用します。 | --device
| ビデオ入力用のデバイスファイルを指定します。 | --yuv
| カメラが出力する画像形式をYUYV形式にします。このオプションを指定しない場合、MJPG形式となります。 | --resolution
| カメラが出力する画像の解像度を指定します。QVGAやVGAなどの文字列で指定する他、640x480のように数値で指定することもできます。 | --fps
| カメラが出力する画像のFPS(frames per sec)を指定します。 | /usr/lib/mjpg_streamer/output_http.so
| HTTP出力を行う出力プラグインを使用します。 | --www
| MJPG streamerが表示するWebページが置かれたディレクトリを指定します。 |
mjpg_streamerコマンドに指定できる引数は、プラグインごとに異なります。各プラグインが取ることができる引数を確認するには、図2.85「mjpg_streamerコマンドのヘルプを調べる」のようにします。 2.7.2. MJPG-streamerを自動起動するmjpg_streamerコマンドが単体で動作することが確認できましたので、次はWebカメラが接続されたときにそのコマンドを自動で実行するよう設定します。「デバイスが接続された時に何かの処理をおこなう」という機能は、Linuxシステムのudevの仕組みを利用して実現します。 udevにより、デバイスが新たに接続されるとそれに対応するデバイスファイルが自動で作成されます。Webカメラが接続された時に/dev/video0が作成されたのはudevの働きによるものです。また、udevdデーモンは、デバイスが接続または取り外された時にカーネルから送られてくるメッセージ(uevent)を受け取り、それに対応した処理を実行します。どのようなデバイスが接続または取り外された時にどのような処理を行うか、というルールは、/etc/udev/rules.d/ディレクトリに置かれたファイルに記述します。udevルールについての詳細は、man 7
udevを参照してください。 今回は、図2.86「Webカメラが接続/取り外しされた時にスクリプトを実行するudevルール」に示すルールを使用します。これを、/etc/udev/rules.d/z10_mjpg-streamer.rulesというファイル名で保存してください。USB High Speedポート(CON5 下段)にWebカメラが接続されると、/etc/config/mjpg-streamer.sh start $KERNELというコマンドが実行されます。$KERNELは、デバイスファイル名に置き換えられます。同様に、Webカメラが取り外されると/etc/config/mjpg-streamer.sh stop $KERNELというコマンドが実行されます。 /etc/config/mjpg-streamer.shは、図2.87「mjpg_streamerを実行するシェルスクリプト」を使います。/etc/config/mjpg-streamer.shに実行権限をつける(chmod +x /etc/config/mjpg-streamer.sh)のを忘れないようにしてください。Webカメラが接続されたときはstartを伴って実行されるため、start_action()を行います。start_action()内では、ledctrlコマンドを使用して赤色LEDを点滅させ、mjpg_streamerコマンドを実行します。また、PIDを使用して多重起動の防止をしています。Webカメラが取り外されたときは、stop_action()が実行され、mjpg_streamerプロセスの停止とLED点滅の停止を行います。
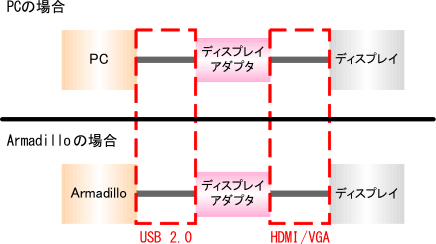
以上の設定を行うと、Webカメラを接続すると自動でビデオサーバーが起動するようになります。 Armadillo-400シリーズは基本的にはLCD以外のビデオ出力機能を持っていませんが、PC用に販売されているUSB接続可能なモニタやディスプレイアダプタを使うことで、簡単にビデオ出力機能を追加することができます。これを応用すると、Armadilloをベースにしたデジタルサイネージを作るといったことも可能になります。ここでは、DisplayLink社のチップが搭載されたUSBディスプレイアダプタLDE-SX015Uを使用する方法を紹介します 使用するソフトウェアおよびハードウェアは、以下の通りです。 - linuxカーネル: linux-2.6.26-at13
- ユーザーランド: Atmark Dist v20101220
- 開発環境: ATDE3 v20100309
- USBディスプレイアダプタ: LDE-SX015U (Logitec社製)
ArmadilloでUSBディスプレイアダプタを使用する場合でも、基本的な仕組みはPCで使う場合と同じです。PCやArmadilloからDisplayLink社製のチップが搭載されたUSBディスプレイアダプタは、USB 2.0で接続します。 ディスプレイアダプタからモニターまでは、アダプタによって異なります。HDMIやVGAなど、製品によって異なりますので、お使いの製品のマニュアルを確認してください。USB接続モニタの場合、DisplayLinkとモニタが一体になっている場合があります。その場合、DisplayLinkとモニタを接続する必要はありません。 LinuxシステムでDisplayLink社製チップが搭載された製品を使うには、2通りの方法があります。一つはフレームバッファとして使う方法、もう一つは専用のライブラリを使って表示する方法です。フレームバッファのドライバを組み込んでしまえば、一般的なフレームバッファにアクセスする方法と同じように動きますので、X Window SystemやAndroidも動かすことができます。但し、これにはカーネルでの対応が必要など、手順が複雑です。 他の方法としては、専用のライブラリ(libdlo)を使った方法があります。この方法であれば、カーネルが対応していなくても簡単にアプリケーションだけで描画することが可能です。ここでは、libdloを使った方法を紹介します。 | libdlo |
|---|
libdloは、freedesktop.orgで開発されているDisplayLinkチップ用のライブラリです[]。libusb[]を使って、DisplayLinkチップとの通信をおこないます。 |
USBディスプレイアダプタの使用方法について説明する前に、DisplayLinkとそれを使用する利点について解説します。DisplayLink社は、USB接続のグラフィックスチップを製造しているメーカーです。これまでのUSB接続のグラフィックスチップでは、高解像度や高いリフレッシュレートのビデオ出力をおこなおうとすると、USBの帯域がボトルネックになっていました。DisplayLink社製チップを使った場合、画像をそのままUSBを通して転送するのではなく、一度圧縮してから転送し、DisplayLinkチップ内で展開してモニタに出力するというアプローチで、USB帯域の問題を解決しています。既存のUSB接続モニタ用のチップと異なり、DisplayLink社製のチップを使った製品では比較的高解像度の出力が得やすいことから、近年採用製品が増えています。 ArmadilloでDisplayLinkを採用することにはいくつか利点があります。 まず挙げられるのは、高解像度の描画が可能になる点です。Armadilloが表示できる画面サイズは、使用しているLCDコントローラによって決まります。Armadillo-400シリーズの場合、i.MX25内蔵のLCDコントローラーを使用しているため、最大800×600サイズとなります。しかし、DisplayLinkを使えば、1920×1080という大きさの表示をすることも可能です。[] また、画面出力に要するメモリを節約可能というメリットもあります。これには少し説明が必要でしょう。 モニタは、基本的に常時データを表示している機器です。PCで通常のビデオカードを使用した場合、この表示されているデータは、ビデオカードからモニタに随時転送されています。モニタが中でバッファしているわけではありません。これは、液晶モニタでもCRTモニタでも変わりありません。 この事情は、Armadilloでも同様です。Armadillo-440液晶モデルの場合、オンボードメモリの一部をLCDに表示するための画像を格納するメモリ領域として確保し、そこから常にデータを読み出し、LCDの信号に変換しています。この処理はi.MX25内蔵のLCDコントローラが担っています。 つまり、メモリ帯域の一部を常に一定量消費していることになります。動画のように、常時画面が変化していくのであればこれも仕方の無いことですが、静止画のように一定時間同じ画像を表示する場合、これはいささかもったいないように思えます。 DisplayLinkは内部にビデオメモリを持っていますので、Armadilloから画像を転送し終わった後は、Armadillo側のメモリを開放してしまっても問題ありません。もちろん、DisplayLinkとモニタとの間では常にデータが流れているわけですが、ArmadilloからDisplayLinkへは必要なときにデータを転送するだけで良いわけです。 Armadillo-400シリーズの動作クロックは400MHzとそう速いわけではないので、残念ながら、高いリフレッシュレートで描画をおこなうといったことは、できません。しかし、DisplayLinkを使用すると高解像度のきれいな画像を大きなモニタで表示するといったことが可能になります。 それでは実際に、DisplayLinkのデバイスをArmadlloに繋いで、画像を描画してみましょう。libdloにはテスト用のコードも入っていますので、今回はこれを使用することにします。 libdloをビルドする前に、ATDE3にlibdloをビルドするために必要なパッケージをインストールします。 libdloのソースコードは、freedesktop.orgのgitリポジトリからクローンしてきます。 以下のようにして、libdloをビルドしてください。 libdlo/src/.libs/libdlo.so.0.1.0にlibdloの共有ライブラリが生成されます。
以下のファイルをArmadilloにlftp等でコピーしてください。 表2.10 libdloサンプルプログラムの動作に必要なファイル | ATDE上のパス | Armadillo上でのパス |
|---|
/usr/arm-linux-gnueabi/lib/libusb-0.1.so.4.4.4 | /home/ftp/pub/libusb-0.1.so.4.4.4 | libdlo/src/.libs/libdlo.so.0.1.0 | /home/ftp/pub/libdlo.so.0.1.0 | libdlo/test/.libs/test1 | /home/ftp/pub/test1 | libdlo/test/images/test08.bmp | /home/ftp/pub/images/test08.bmp | libdlo/test/images/test16.bmp | /home/ftp/pub/images/test08.bmp | libdlo/test/images/test24.bmp | /home/ftp/pub/images/test08.bmp | libdlo/test/images/test32.bmp | /home/ftp/pub/images/test08.bmp |
サンプルプログラムからライブラリが使用可能なように、ライブラリディレクトリに共有ライブラリのシンボリックリンクを作成しておきます。 ArmadilloとUSBディスプレイアダプタ、USBディスプレイアダプタをモニタをそれぞれ接続してください。USBディスプレイアダプタは、ArmadilloのUSB 2.0High Speedポート(CON5 下段)に接続してください。 サンプルプログラムtest1を実行するとモニタにテスト画面が表示されます。 Armadillo-440に、Armadillo-440 LCD拡張ボードで採用しているLCD以外のLCDを接続する方法について紹介します。 Armadillo-440液晶モデル開発セット(以降、LCDモデル)では、以下のデバイスがLCD拡張ボード経由でArmadillo-440に接続されています。 - LCD:4.3インチ WQVGA
- タッチスクリーン:4線式抵抗膜方式
この章では以下の物を接続する場合を例に説明します。 - LCD:10.4インチ VGAFG
- タッチスクリーン:4線式抵抗膜方式
また、ソフトウェアは以下を使用します。 - Linuxカーネル: linux-2.6.26-at13
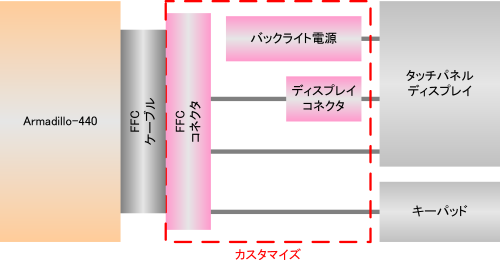
大きく、ハードウェアのカスタマイズとソフトウェア対応の2つに分けて説明していきます。ハードウェアのカスタマイズは、LCDパネルの接続、バックライトへの電源供給、タッチスクリーンの接続、そしてボタンの接続について順番に説明していきます。ソフトウェア対応は、LCDパネル、バックライト、タッチスクリーン、ボタンそれぞれのドライバーについて説明していきます。 Armadillo-440にLCDディスプレイを接続する場合は、LCDモデルのように外部基板でコネクタ形状を変換します。また、LCDバックライト用の電源も別途用意する必要あります。 イメージとして、以下のようなカスタムインターフェース基板を作ることになります。 今回の例に利用するデバイスの詳細は以下の通りです。 表2.11 タッチパネルディスプレイ 製品型番 | FG100410DNCWBGT1(DATA IMAGE社製) | 解像度 | 640 x 480 dot | LCDパネルの種類 | TFT | タッチスクリーンの種類 | 4線式抵抗膜方式 | バックライトの種類 | CCFL蛍光管 | インターフェースの種類 | 3.3V C-MOS 18bitパラレルRGBインターフェース | 電源電圧範囲 | 3.0V~3.6V | 消費電流(3.3V) | Typ. 420mA | コネクタ | DF9C-31P-1V(32) (HIROSE) |
![[ティップ]](images/tip.png) | LCDの選択 |
|---|
Armadillo-440のLCDインターフェースは標準でパラレルインターフェースに対応していますので、パラレルインターフェースタイプのLCDパネルを選択するようにしてください。Armadillo-440で出力可能な最大解像度は800x600ピクセルなので、それ以下の解像度のLCDパネルを選択しましょう。 |
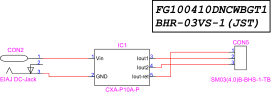
表2.12 DC-ACインバータ(バックライト電源) 製品型番 | CXA-P10A-P | 出力開放電圧 | 1.5kV | 出力電力 | 9W | 入力電圧 | 5V |
![[警告]](images/warning.png) | 注意: 拡張基板の消費電流 |
|---|
LCDパネルの電源をArmadillo-440の3.3V電源から供給する場合は、外部回路の消費電流が最大合計500mA以下になるようにしてください。詳細は、Armadillo-400シリーズハードウェアマニュアル「5.18.電源回路の構成」をご確認ください。 |
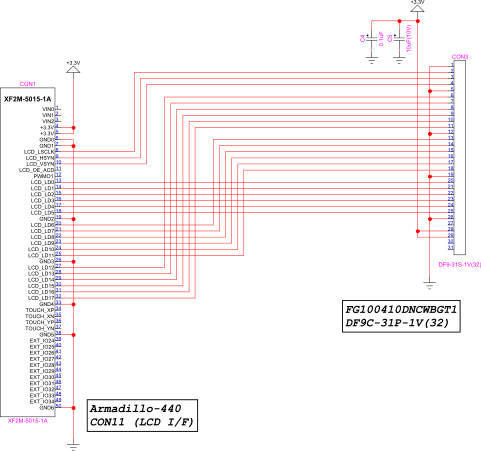
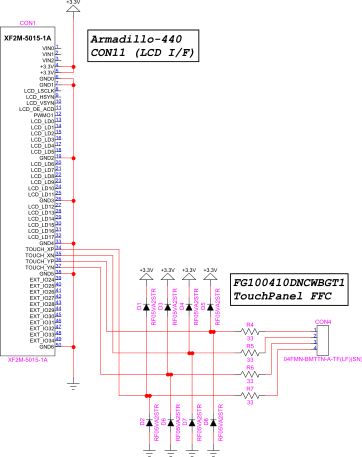
今回利用する10.4インチLCD(FG100410DNCWBGT1)には1mmピッチ面実装タイプのコネクタが付いています。このコネクタにArmadillo-440のCON11(LCDインターフェース)を繋ぐためにコネクタの形状を変換します。以下の回路図のようにLCDパネルのコネクタからArmadillo-440のCON11と接続するFPC 0.5mmピッチコネクタに配線します。FPC 0.5mmピッチコネクタとArmadillo-440のCON11はLCDモデルに付属しているFFCケーブルを使用して接続します。 FG100410DNCWBGT1に電源を供給するように、以下の回路図のようにDC-ACインバータを配線します。 | 注意: バックライト駆動用のインバータ |
|---|
CFLバックライト駆動用のインバータは高圧電圧が発生しますので、ショートやけがなどに十分ご注意ください。 |
| バックライト電源の選択 |
|---|
バックライト電源はLCDパネルのバックライトの種類に合わせて用意する必要があります。 LCDモデルでは、LEDバックライトタイプのLCDパネルを使用していますが、今回使用するLCDパネルは蛍光灯(CFL)バックライト方式のLCDパネルになります。 バックライト電源の選択では、Armadillo-440の電源電圧と同じ5V入力の物を選択すると、電源が統一できます。またCFLバックライト方式では、蛍光灯を駆動するために高圧電圧に変換する装置「インバータ」が必要で、インバータの出力電流は蛍光管の定格より余裕のあるものを選択しましょう。ただし今回使用した電源は都合により定格より少し下回っていますので定格通りの明るさで使用したい場合は、別の物を選択すると良いでしょう。 |
タッチパネルの信号とArmadillo-440は以下の回路図のように配線します。 | タッチスクリーンの選択 |
|---|
4線式抵抗膜方式のタッチパネルはArmadillo-440に直接接続することが可能です。また、Armadillo内部のIC保護のためタッチパネルの信号には過電圧および過電流保護素子を入れることを推奨します。 |
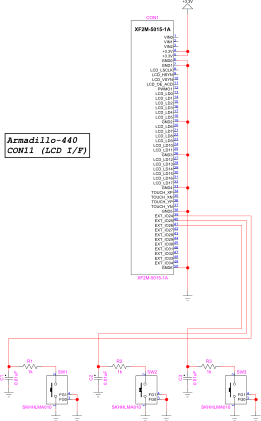
入力用のボタンはLCDモデルと同じピンに接続しています。 ハードウェアのカスタマイズに合わせて、ソフトウェアも変更します。該当するファイルで定義されている設定項目を変更するだけで、簡単に新しいハードウェアに対応させることができます。 LCDパネルに描画するには、フレームバッファを使用します。フレームバッファドライバーのソースコードはlinux-2.6.26-at13/drivers/video/mxc/mx2fb.cです。Armadillo-400シリーズのフレームバッファドライバーでは、色々なLCDに対応できるように、LCDパネルごとに異なるタイミング設定をlinux-2.6.26-at13/drivers/video/mxc/mxc_modedb.cに分離してあります。標準以外のLCDをArmadillo-400シリーズに接続したい場合は、mxc_modedb.cに設定を追加し、使用する設定をカーネルコンフィギュレーションまたはカーネルパラメータで指定します。 LCDパネルごとに設定する必要があるタイミング情報には、以下のものがあります。 - 垂直同期周波数(リフレッシュレート)
- ドットクロック(ピクセルクロック)
- 水平解像度(Xレゾリューション)
- 垂直解像度(Yレゾリューション)
- 左マージン(水平バックポーチ)
- 右マージン(水平フロントポーチ)
- 水平同期期間(水平ブランク)
- 上マージン(垂直バックポーチ)
- 下マージン(垂直フロントポーチ)
- 垂直同期期間(垂直ブランク)
これらの項目に関しては、linux-2.6.26-at13/Documentation/fb/framebuffer.txtに説明が載っているので参照してください。タイミング情報は、LCDパネルの製品マニュアルやデータシートを参照して計算します。 これらの値を計算し、linux-2.6.26-at13/drivers/video/mxc/mxc_modedb.cの、mxcfb_modedb(struct fb_videomodeの配列)に追加します。 FG100410DNCWBGT1の場合、次のようになります。 表2.13 FG100410DNCWBGT1のLCDタイミング | 項目 | データシート記載の値 | struct fb_videomodeのメンバ名 | 値 |
|---|
ドットクロック(fCLK=1/tCLK) | 21〜29[MHz] | pixclock | 39683[pico_secs/clock] | 水平同期期間(tHP) | 800[tCLK] | なし | | 水平解像度(tHV) | 640[tCLK] | xres | 640[clock/line] | 水平同期期間(tHBK) | 160[tCLK] | hsync_len | 160[clock/line] | 左マージン | 記載なし | left_margin | 0[clock/line] | 右マージン | 記載なし | right_margin | 0[clock/line] | 垂直同期周波数(fV) | 60[Hz] | refresh | 60[frame/sec] | 垂直解像度(tW) | 480[tHP] | yres | 480[line/frame] | 垂直同期期間(tBK) | 45[tHP] | vsync_len | 45[line/frame] | 上マージン | 記載なし | upper_margin | 0[line/frame] | 下マージン | 記載なし | lower_margin | 0[line/frame] | シンクタイミング | 記載なし | sync | 0 | ビデオモード | 記載なし | vmode | FB_VMODE_NONINTERLACED | その他 | 記載なし | flag | 0 |
同時に、LCDパネルとの接続線のポラリティなどをmxcfb_mode_disp_db(struct mxcfb_mode_dispの配列)に追加します。FG100410DNCWBGT1の場合、Data Enable信号がアクティブハイなので、disp_ifaceメンバにMXCFB_DISP_OE_ACT_HIGHを指定します。nameメンバには、struct fb_videomodeのnameと同じものを指定してください。 実は、FG100410DNCWBGT1用の値は既にカーネルに定義済みです。Armadilloを保守モードで起動し、カーネルパラメータのvideoを指定すると、FG100410DNCWBGT1用の設定を使用することができます。 バックライトの制御は、PWM機能を使用したPWMバックライトドライバーがおこなっています。バックライトドライバーの仕様に関しては、「Armadillo-400 シリーズソフトウェアマニュアル」の「LEDバックライト」の章を参照してください。 PWMバックライトドライバー自身のソースコードはlinux-2.6.26-at13/drivers/video/backlight/pwm_bl.cです。PWM機能のドライバーのソースコードは、linux-2.6.26-at13/drivers/mxc/pwm/mxc_pwm.cです。これらのドライバーは、Platform Driver[]というドライバーモデルに従って実装されています。Platform Driverでは、ボードごとに異なる設定をstruct platform_deviceに記述することで、様々なボードに同じドライバーで対応できるようになっています。 Armadillo-400シリーズの場合、ボードごとの設定はlinux-2.6.26-at13/arch/arm/mach-mx25/armadillo400.cに記述しています。バックライトに関連する設定には、図2.104「バックライトに関連する設定」に挙げるものがあります。 armadillo400_pwm1_dataがPWM機能に関連する設定です。バックライトには、PWM1を使用しています。invertメンバでPWMのポラリティを指定することができます。また、exportメンバに1を指定すると、sysfsからPWM出力の設定ができるようになります。PWM1は、PWMバックライトドライバーによって出力の設定をおこなうため、0が指定されています。 armadillo440_pwm_backlight_dataが、PWMバックライトドライバーに関する設定です。pwm_idメンバに、使用するPWMデバイスのIDを指定します。0はPWM1に対応します。max_brightnessメンバにバックライトの最大輝度を、dft_brightnessにバックライト輝度の初期値を設定します。また、default_onメンバに1を指定することで、起動直後からバックライトをオンにできます。pwm_period_nsメンバで、PWMの周期をナノ秒単位で指定します。PWMバックライトドライバーでは、輝度(brightness)をPWMのディーティー比で調整します。 タッチスクリーンの入力は、ADC機能を使用したADCタッチスクリーンドライバーで処理しています。タッチスクリーンドライバーはLinuxのインプットレイヤーに対応しているので、アプリケーションは/dev/input/event*のデバイスファイルを使ってデータを取り出すことができます。タッチスクリーンドライバーの仕様に関しては、「Armadillo-400 シリーズソフトウェアマニュアル」の「タッチスクリーン」の章を参照してください。 ADCタッチスクリーンドライバー自身のソースコードは、drivers/input/touchscreen/imx_adc_ts.cです。ADCドライバーのソースコードは、linux-2.6.26-at13/drivers/mxc/adc/imx_adc.cです。PWMバックライトと同様、ADCドライバーもPlatform Driverとして実装されています。linux-2.6.26-at13/arch/arm/mach-mx25/armadillo400.c内の、ADCに関する設定は次の通りです。 is_wake_srcメンバに1を指定すると、スリープ状態からタッチスクリーン入力で起床することができるようになります。CONFIG_ARMADILLO400_TOUCHSCREEN_IS_WAKE_SRCは、Linuxカーネルコンフィギュレーションの、「System Type ---> Freescale MXC Implementations ---> MX25 Options ---> Armadillo-400 Board options ---> [*] Select touchscreen for wakeup source」をチェックすると1に、チェックを外すと0に設定されます。 ボタンからの入力は、GPIOを使用したGPIOキーボードドライバーで処理しています。GPIOキーボードドライバーはタッチスクリーンドライバーと同様にインプットレイヤーに対応しています。ボタンのドライバーの仕様に関しては、「Armadillo-400 シリーズソフトウェアマニュアル」の「ボタン」の章を参照してください。 GPIOキーボードドライバーのソースコードは、linux-2.6.26-at13/drivers/input/keyboard/gpio_keys.cです。GPIOキーボードドライバーも、Platform Driverとして実装されています。PIOキーボードとして使用するGPIOのリストは、linux-2.6.26-at13/arch/arm/mach-mx25/armadillo400.c内に記述されています。 struct gpio_keys_buttonの定義は、次のようになっています。 struct gpio_keys_buttonのそれぞれのメンバを表2.14「struct gpio_keys_buttonのメンバ」に示します。 表2.14 struct gpio_keys_buttonのメンバ | メンバ名 | 説明 |
|---|
code | キーコードの指定 | gpio | 使用するGPIO番号を指定 | active_low | どのタイミングでキー入力を判断するかを指定 | desc | キーの識別する文字列を指定 | type | キー入力のイベントタイプを指定 | wakeup | GPIOキーボード入力でスリープ状態から起床するかどうかを指定 |
codeメンバに、キーコードを指定します。gpioメンバには、使用するGPIO番号を指定します。active_lowメンバを1に指定すると、GPIOのレベルがHighからLowに変化したときに入力があったと判断します。descメンバには、キーの識別する文字列を指定してください。typeには、キー入力のイベントタイプを指定します。最後のwakeupメンバに1を指定すると、スリープ状態からGPIOキーボード入力で起床することができるようになります。CONFIG_ARMADILLO400_GPIO_KEYS_IS_WAKE_SRCは、Linuxカーネルコンフィギュレーションの、「System Type ---> Freescale MXC Implementations ---> MX25 Options ---> Armadillo-400 Board options ---> [*] Select GPIO Keys for wakeup source」をチェックすると1に、チェックを外すと0に設定されます。 | より多くの入力キーが必要な場合 |
|---|
Armadillo-400シリーズでは、キー入力としてGPIOキーボードの他に、キーバッドを使うこともできます。キーパッドでは、最大4×6=24個のキー入力を扱うことができます。詳しくは、「Armadillo-400 シリーズソフトウェアマニュアル」の「キーパッド」の章を参照してください。 |
| |
|